蝶翼式MEMS谐振结构随机振动下偏置误差抑制方法
本发明涉及mems传感器,具体是一种蝶翼式mems谐振结构随机振动下偏置误差抑制方法。
背景技术:
1、微机电系统(以下简称“mems”)传感器具备成本低、尺寸小、易批量化制造等优点,目前广泛用于消费电子、制导弹药等军/民用领域。随着应用场景更加丰富,它的工作环境也变得更加恶劣,例如,随机振动这一典型的外部环境干扰因素。随机振动是指具有统计特征但无法用单一确定函数来表示的振动,它会改变mems传感器谐振结构中本身应力的分布及其运动状态,导致测量精度下降,严重的甚至会使器件失效,这些问题都限制了高精度mems传感器的工程化应用。
2、避免随机振动对mems传感器工作的影响,传统的策略是在安装基座和谐振结构之间增加隔振装置,具有隔振性能好、设计简单灵活等优点,但被动隔振装置会增加系统复杂度和封装空间,而主动隔振装置会提升器件功耗。从结构设计的角度,可以提升谐振结构本身的抗振性能,主要方式是在敏感结构增加振动隔离框架、提升敏感结构谐振频率等,但是存在高精度加工要求导致的制造误差和成本问题。先进算法进行误差补偿可以独立于谐振结构设计之外,直接利用谐振结构输出数据降低振动导致的偏置变化量,但由于不同谐振结构间误差机理不一样,所以偏置重复性较低,导致它的补偿效果存在局限性。针对随机振动导致的谐振结构偏置误差机理提升振动免疫性能,不改变结构本身或封装形式,也不需要输出数据后处理,但目前的研究成果没有实现误差完全抑制,所以迫切需要提出更加完善的方法来补偿随机振动引起的偏置误差,实现更优的误差抑制效果。
技术实现思路
1、针对上述现有技术中的不足,本发明提供一种蝶翼式mems谐振结构随机振动下偏置误差抑制方法,能够在不改变谐振结构、封装形式以及无需进行数据后处理的前提下,有效实现随机振动环境下谐振结构偏置误差的完全抑制。
2、为实现上述目的,本发明提供一种蝶翼式mems谐振结构随机振动下偏置误差抑制方法,在蝶翼式mems谐振结构的电极层上设置误差校正电极,并在误差校正电极上施加步进的直流电压,调整蝶翼式mems谐振结构中敏感结构的模态参数中的刚度矩阵与阻尼矩阵,实现对蝶翼式mems谐振结构中敏感结构的振型调谐,直至完成随机振动环境下蝶翼式mems谐振结构偏置误差的完全抑制;
3、误差校正电极上施加直流电压后的刚度矩阵 k'为:
4、;
5、其中,、分别为考虑刚度耦合误差时 x、y方向的刚度,为 x方向到 y方向的刚度耦合误差,为 y方向到 x方向的刚度耦合误差,、分别为对 x、y方向刚度的影响,为对 x方向与 y方向之间刚度耦合误差的影响 , 为对 y方向与 x方向之间刚度耦合误差的影响,为误差校正电极上加上误差校正电压后静电力产生的刚度;
6、误差校正电极上施加直流电压后的阻尼矩阵 c'为:
7、;
8、其中,、分别为考虑阻尼耦合误差时 x、y方向阻尼,为 x方向到 y方向的阻尼耦合误差,为 y方向到 x方向的阻尼耦合误差,、分别为对 x、y方向阻尼的影响,为对 x方向与 y方向之间阻尼耦合误差的影响,为对 y方向与 x方向之间阻尼耦合误差的影响,为误差校正电极上加上误差校正电压后静电力产生的阻尼。
9、在其中一个实施例,所述在蝶翼式mems谐振结构的电极层上设置误差校正电极,具体为:
10、在蝶翼式mems谐振结构电极层设置呈“×”分布的两组误差校正电极。
11、在其中一个实施例,所述在误差校正电极上施加步进的直流电压具体包括如下步骤:
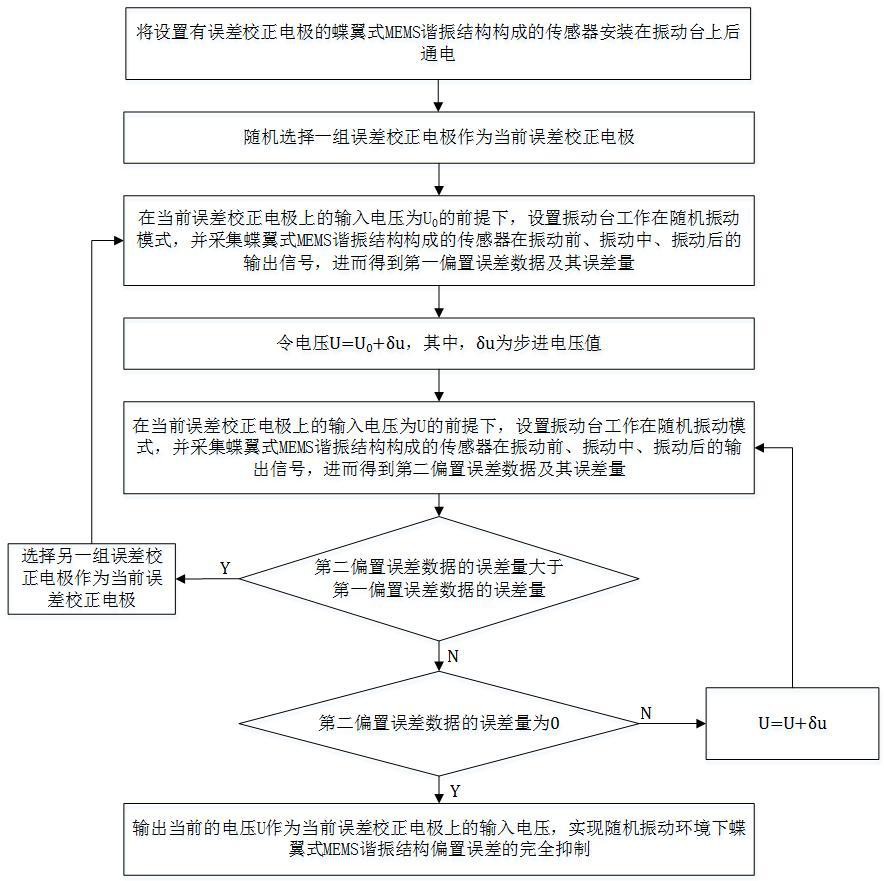
12、步骤1,将设置有误差校正电极的蝶翼式mems谐振结构构成的传感器安装在振动台上后通电;
13、步骤2,随机选择一组误差校正电极作为当前误差校正电极;
14、步骤3,在当前误差校正电极上的输入电压为u0的前提下,设置振动台工作在随机振动模式,并采集蝶翼式mems谐振结构构成的传感器在振动前、振动中、振动后的输出信号,进而得到第一偏置误差数据及其误差量,其中,u0的值等于蝶翼式mems谐振结构中敏感结构的参考电压值;
15、步骤4,令电压u=u0+δu,其中,δu为步进电压值;
16、步骤5,在当前误差校正电极上的输入电压为u的前提下,设置振动台工作在随机振动模式,并采集蝶翼式mems谐振结构构成的传感器在振动前、振动中、振动后的输出信号,进而得到第二偏置误差数据及其误差量;
17、步骤6,判断第二偏置误差数据的误差量是否大于第一偏置误差数据的误差量:
18、若是,选择另一组误差校正电极作为当前误差校正电极后,返回步骤3;
19、否则,进行步骤7;
20、步骤7,判断第二偏置误差数据的误差量是否等于0:
21、若是,输出当前的电压u作为当前误差校正电极上的输入电压,实现随机振动环境下蝶翼式mems谐振结构偏置误差的完全抑制;
22、否则,令u=u+δu后,返回步骤5。
23、在其中一个实施例,步骤3中,所述第一偏置误差数据及其误差量的获取过程为:
24、在振动台随机振动前,采集蝶翼式mems谐振结构构成的传感器在第一时段内的输出信号并求取均值;
25、在振动台随机振动过程中,采集蝶翼式mems谐振结构构成的传感器在第二时段内的输出信号并求取均值;
26、在振动台停止随机振动后,采集蝶翼式mems谐振结构构成的传感器在第三时段内的输出信号并求取均值;
27、计算得到第一偏置误差数据的误差量为。
28、在其中一个实施例,步骤4中,所述第二偏置误差数据及其误差量的获取过程为:
29、在振动台随机振动前,采集蝶翼式mems谐振结构构成的传感器在第四时段内的输出信号并求取均值;
30、在振动台随机振动过程中,采集蝶翼式mems谐振结构构成的传感器在第五时段内的输出信号并求取均值;
31、在振动台停止随机振动后,采集蝶翼式mems谐振结构构成的传感器在第六时段内的输出信号并求取均值;
32、计算得到第二偏置误差数据的误差量为。
33、在其中一个实施例,所述第一时段与所述第四时段的时长相等,所述第二时段与所述第五时段的时长相等,所述第三时段与所述第六时段的时长相等。
34、与现有技术相比,本发明具有如下有益技术效果:
35、1.本发明通过在蝶翼式mems谐振结构设置误差校正电极,在误差校正电极上施加直流电压后,对于工作状态下做空间运动的蝶翼式mems谐振结构中的敏感结构可以调整其周向和法向方位,实现蝶翼式mems谐振结构中的敏感结构模态振型调谐,克服了随机振动扰动导致敏感结构运动状态改变而产生的偏置变化,同时消除了其他引起偏置变化的误差,例如刚度耦合误差、阻尼耦合误差以及力耦合误差等,有效实现了蝶翼式mems谐振结构偏置误差的完全抑制。
36、2.本发明能够既不改变mems谐振结构形式和加工难度,也不需要大量先验数据和复杂算法支撑,能够快速、有效地从误差机理分析与抑制层面实现传感器振动免疫能力提升。
- 还没有人留言评论。精彩留言会获得点赞!