一种连续测量的原子干涉仪控制方法及系统与流程
本发明属于原子惯性测量,公开了一种连续测量的原子干涉仪控制方法及系统。
背景技术:
1、原子干涉仪作为新型的量子传感器,根据不同的干涉类型和系统结构,原子干涉仪可以变为原子绝对重力仪、原子干涉陀螺仪、原子干涉加速度计等,均可以敏感惯性物理量,具有超高精度、长寿命等优点。但是原子干涉仪应用于惯性导航场景时,由于其装载原子所带来的死区时间,原子干涉仪无法实现真正意义上的连续测量,应用于惯性导航领域时,会进一步影响惯性导航系统的实时性,增大导航误差。
2、现有一些消除掉原子干涉仪死区的方案。一种基于双组分原子交织干涉效应的重力仪,该方法通过使用双组份的原子进行干涉来消除掉死区,但其光学系统和电学系统需要满足两种组分原子的需求,相当于光学系统和电学系统的需求翻倍,大大增加了系统的复杂度,降低了系统可靠性。叠加式无死区原子干涉陀螺仪,该系统使用两个真空腔实现两组原子对抛干涉,通过控制两个真空腔内的干涉时序,使得总是有原子在进行原子干涉,从而实现死区的消除,但该设计需要使用两个真空腔、24束囚禁光、两组态制备光、两组探测光和一组拉曼激光,明显的增加了系统的复杂度,实现起来较为困难,不利于设备的小型化。
技术实现思路
1、发明目的:提供一种连续测量的原子干涉仪控制方法及系统,消除死区时间,实现连续测量,拓宽原子干涉仪的使用场景,进一步应用于惯性导航场景。
2、技术方案:
3、一种连续测量的原子干涉仪控制方法,包括:原子先后进行n次受激拉曼跃迁,每次受激拉曼跃迁间的时间差为t,实现原子干涉,在同一真空腔中,令多个原子团先后进行原子干涉,当第k个原子团进行第n次受激拉曼跃迁时,第k+1个原子团与其共享拉曼激光,同步进行第k+1个原子团的第1次受激拉曼跃迁,这样可以确保在真空腔中每个时刻均有原子团在进行原子干涉,干涉仪输出结果覆盖整个干涉仪工作时间,实现原子干涉仪的连续测量,其中,n小于等于n。
4、进一步地,对于一个原子团该控制方法分为以下步骤:
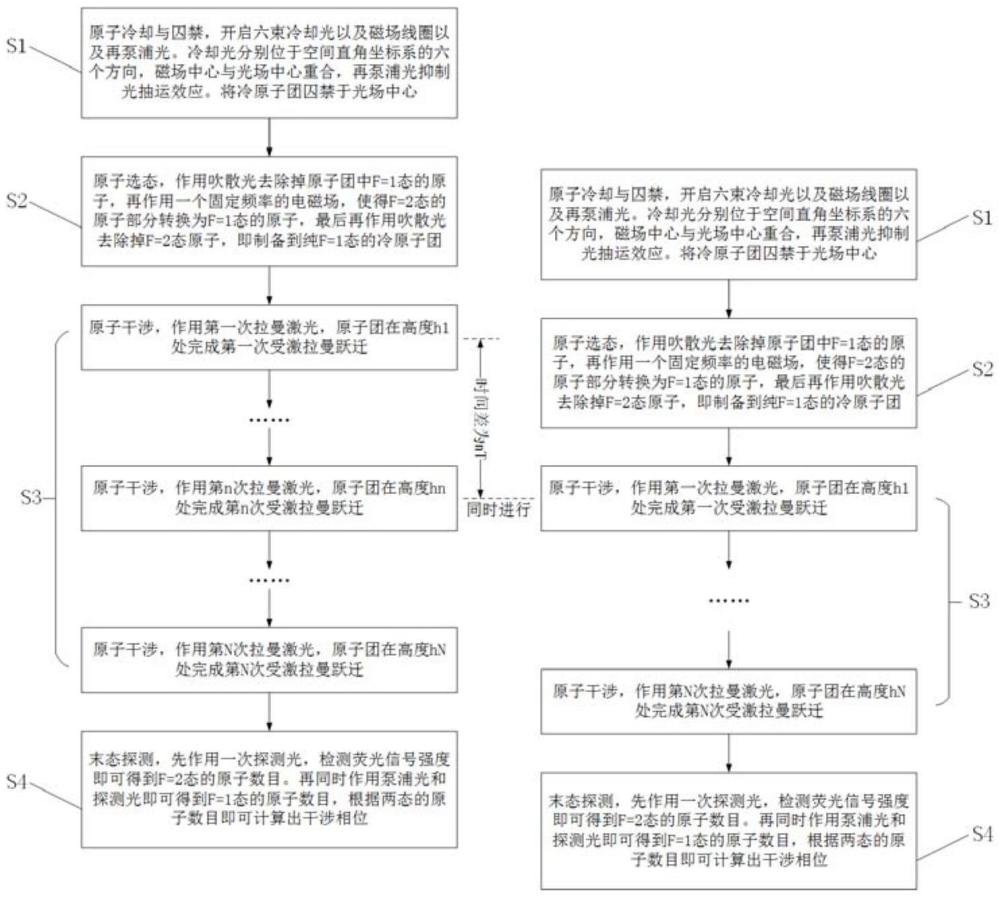
5、步骤s1:原子冷却与囚禁:通过控制mot线圈、冷却光和再泵浦光1,完成冷原子团的制备;
6、步骤s2:对制备完成的原子团进行原子选态:通过控制吹散光、选态电磁场发生器,制备得到内态为|f=1,mf=0>的原子团;
7、步骤s3:对内态为|f=1,mf=0>的原子团进行原子干涉:通过控制光学系统参数与时序,完成n次受激拉曼跃迁,实现原子干涉;
8、步骤s4:对完成原子干涉的原子团进行末态探测:通过控制探测光和再泵浦光2,得到位于f=1态和f=2态原子的数目,得到f=2态原子布居数pf=2=n2/(n1+n2),f=2态原子布居数,干涉相位满足:其中,n1为f=1态的原子数,n2为f=2态的原子数,干涉相位
9、进一步地,对于进行干涉的任意一个原子团,总共在真空腔内进行n次受激拉曼跃迁,相邻两次受激拉曼跃迁时间间隔为t,则其在真空腔中自由下落时,每次干涉的位置为h(n)=g[(n-1)t+t0]2/2,式中t0为原子团开始下落到第一次进行受激拉曼跃迁所用时间,
10、设第k个进行干涉的原子团,其进行n次受激拉曼跃迁的时间点分别为{t1,t2,…,tn},则第k+1个进行干涉的原子团进行n次受激拉曼跃迁的时间点分别为{t1+nt,t2+nt,…,tn+nt},依次类推,第k+m个进行干涉的原子团进行n次受激拉曼跃迁的时间点分别为{t1+nmt,t2+nmt,…,tn+nmt},在空间上,当第k个进行干涉的原子团处在h=gt2/2位置时,第k+m个进行干涉的原子团位置为h=g(t-nmt)2/2。
11、进一步地,步骤s1,具体为:
12、首先mot线圈产生一梯度磁场,三组冷却光反射镜分别位于三维直角坐标系的六个方向,光场的中心与梯度磁场的零点重合;每个方向的冷却光对迎面的原子产生阻尼力,同时梯度磁场与激光的偏振相结合产生了对原子的回复力,最终使得原子被囚禁于光场的中心处,同时作用再泵浦光1,抑制光抽运效应,使得冷却过程可以持续进行。
13、进一步地,步骤s2具体为:
14、关闭s1步骤中使用的mot线圈、冷却光与再泵浦光,首先通过吹散光去除掉原子团中f=1态的原子,然后在原子团位置处作用一个使布居数反转的电磁场,使得|f=2,mf=0>的原子转移到f=1,mf=0>能级,再作用一次吹散光,去除掉f=2态的原子,即可得到纯|f=1,mf=0>态的原子团,完成步骤s2。
15、进一步地,步骤s3具体为:
16、控制拉曼激光的开启时刻,实现n次受激拉曼跃迁,作用时刻序列为{t1,t2,…,tn},每次开启拉曼激光时,控制本次拉曼激光的开启时间长度τ以及拉曼激光强度i,实现原子内态的50%翻转或100%翻转,通过配置作用时刻序列{t1,t2,…,tn}、τ以及i,实现不同种类的原子干涉,测量不同的物理量。
17、进一步地,步骤s4具体为:
18、利用探测光探测f=2态的原子,探测所产生荧光被光电探测器所收集,输出对应的荧光信号,该荧光信号强度与f=2态的原子数目呈线性关系;再通过再泵浦光2和探测光探测f=1态的原子,通过光电探测器记录其荧光信号,该荧光信号强度与f=2态的原子数目呈线性关系,实现双态原子数目的探测。
19、一种连续测量的原子干涉仪控制系统,所述系统为真空腔,真空腔包括:原子制备区、原子干涉区、原子探测区,其中,原子制备区内包括mot线圈、再泵浦光1、冷却光、三组冷却光反射镜、吹散光、选态电磁场发生器,mot线圈、冷却光和三组冷却光反射镜构成磁光阱,三组冷却光反射镜分别位于三维直角坐标系的六个方向,mot线圈的磁场强度零点位置与三组反射镜的几何中心重合;再泵浦光1方向指向冷却光的光场中心;选态电磁场发生器、吹散光位于原子制备区底端;
20、原子干涉区包括拉曼激光、拉曼激光反射镜、四分之一波片,拉曼激光反射镜和四分之一波片用于生成用于反向拉曼跃迁的一对拉曼激光;拉曼激光位于整个真空腔的顶部,其方向为重力方向;拉曼光反射镜位于整个真空腔的底部,镜面垂直于拉曼光方向;四分之一波片位于拉曼光反射镜正上方;
21、原子探测区包括探测光、探测光反射镜、再泵浦光2、光电探测器;探测光位于原子探测区顶部,分为两束,光的方向垂直于重力方向;再泵浦光2位于两束探测光的中间,方向与探测光平行;探测光反射镜和光电探测器位于正对探测光的另一侧;
22、原子制备区位于真空腔顶部,完成步骤s1与s2,释放原子团,原子团开始自由下落,进入原子干涉区,在干涉区使用的拉曼激光与原子团自由下落轨迹相重合,完成步骤s3后,原子团到达原子探测区时,完成步骤s4。
23、有益效果:
24、1、本发明通过控制原子干涉仪的时序,令前后进行干涉的原子团共用拉曼激光,达到了消除原子干涉仪死区的效果,实现了原子干涉仪的连续测量,可以更好的令原子干涉仪作为惯性传感器应用于惯性导航领域。
25、2、本发明系统复杂度相较于传统原子干涉重力仪方案并没有明显增加,只需要对系统的各个子模块的时序重新配置,即可实现连续的绝对重力测量,相较于现有的其他消除死区方案有着更简易的系统及控制方案。
- 还没有人留言评论。精彩留言会获得点赞!