机器人定位方法、装置、计算机设备、存储介质和程序产品与流程
本技术涉及计算机,特别是涉及一种机器人定位方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、在一些场景中,例如,数据中心环境,需要机器人进行巡检全面感知数据中心的环境状况,例如,设备运行温度和机房空间布局等信息。其中,对于巡检机器人的定位至关重要。
2、目前的巡检机器人的定位技术中,主要依赖于传统的激光视觉技术,利用单一数据源,例如,点云数据,对巡检机器人进行定位,在数据中心布局相似的环境中,易出现“假回环”现象导致定位误差,存在定位精准度低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种机器人定位方法、装置、计算机设备、存储介质和计算机程序产品。
2、第一方面,本技术提供了一种机器人定位方法。所述方法包括:
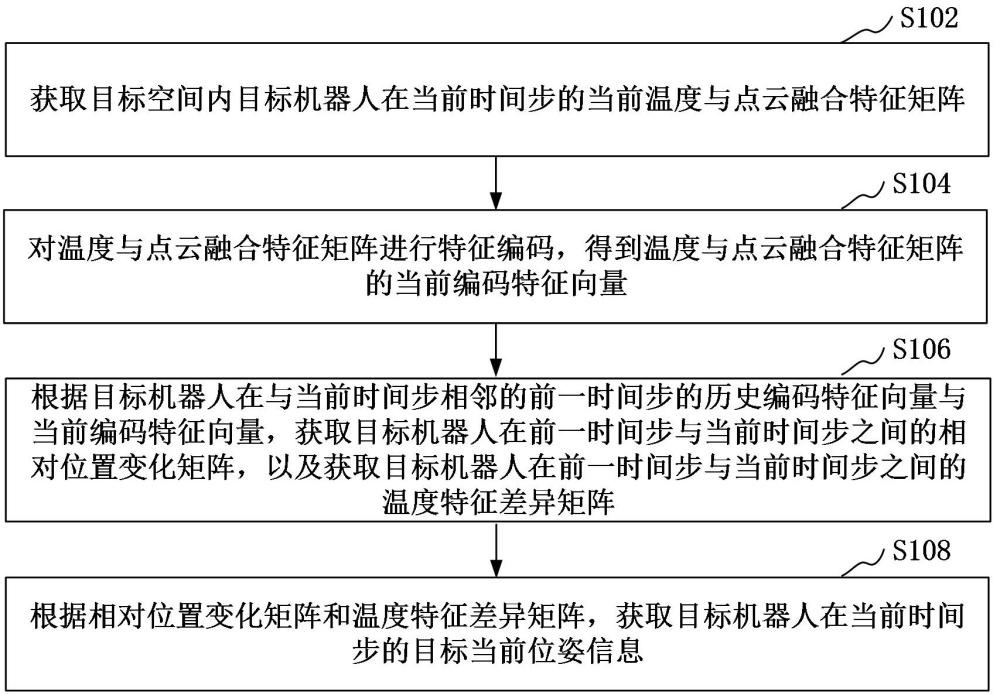
3、获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;
4、对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量;
5、根据所述目标机器人在与所述当前时间步相邻的前一时间步的历史编码特征向量与所述当前编码特征向量,获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,以及获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵;
6、根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息。
7、在其中一个实施例中,所述对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量,包括:构建针对所述目标空间的初始状态空间模型;根据当前温度与点云融合特征矩阵,获取所述初始状态空间模型的特征关联参数;根据所述特征关联参数和所述初始状态空间模型,获取针对所述目标空间的目标状态空间模型;利用所述目标状态空间模型,对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的所述当前编码特征向量。
8、在其中一个实施例中,所述获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,包括:在所述前一时间步对应的历史点云数据集中确定第一点云子集;根据所述历史编码特征向量和所述当前编码特征向量,在所述当前时间步对应的当前点云数据集中筛选出与所述第一点云子集相匹配的第二点云子集;所述第二点云子集包含的多个第二点云数据与所述第一点云子集包含的多个第一点云数据之间存在对应关系;根据所述第二点云子集与所述第一点云子集之间的差异信息,获取所述相对位置变化矩阵。
9、在其中一个实施例中,所述获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵,包括:根据所述历史编码特征向量和所述当前编码特征向量,获取所述当前时间步对应的当前温度特征矩阵与所述前一时间步对应的历史温度特征矩阵的温度变化信息;根据所述温度变化信息,获取所述温度特征差异矩阵。
10、在其中一个实施例中,所述根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息,包括:构建所述目标机器人在所述目标空间内的初始位姿预测函数和初始预测误差协方差函数;根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述初始位姿预测函数对应的目标位姿预测函数,以及获取所述初始预测误差协方差函数对应的目标预测误差协方差函数;利用所述目标位姿预测函数和所述目标预测误差协方差函数,获取所述目标机器人在所述当前时间步的所述目标当前位姿信息。
11、在其中一个实施例中,所述根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述初始位姿预测函数对应的目标位姿预测函数,包括:根据所述温度特征差异矩阵,获取所述温度特征差异矩阵针对所述初始位姿预测函数的温度观测残差量;根据所述温度观测残差量,获取所述初始位姿预测函数对应的第一优化位姿预测函数;根据所述相对位置变化矩阵,获取所述相对位置变化矩阵针对所述初始位姿预测函数的空间观测残差量;根据所述空间观测残差量,获取所述初始位姿预测函数对应的第二优化位姿预测函数;根据所述第一优化位姿预测函数和所述第二优化位姿预测函数,获取所述初始位姿预测函数对应的所述目标位姿预测函数。
12、在其中一个实施例中,所述根据所述温度观测残差量,获取所述初始位姿预测函数对应的第一优化位姿预测函数,包括:获取所述温度特征差异矩阵针对所述初始位姿预测函数的温度卡尔曼增益;根据所述温度观测残差量和所述温度卡尔曼增益,获取所述初始位姿预测函数对应的所述第一优化位姿预测函数。
13、在其中一个实施例中,所述根据所述空间观测残差量,获取所述初始位姿预测函数对应的第二优化位姿预测函数,包括:获取所述相对位置变化矩阵针对所述初始位姿预测函数的空间卡尔曼增益;根据所述空间观测残差量和所述空间卡尔曼增益,获取所述初始位姿预测函数对应的所述第二优化位姿预测函数。
14、在其中一个实施例中,所述获取所述初始预测误差协方差函数对应的目标预测误差协方差函数,包括:获取所述温度特征差异矩阵针对所述初始位姿预测函数的温度卡尔曼增益;根据所述温度卡尔曼增益,获取所述初始预测误差协方差函数对应的第一优化预测误差协方差函数;获取所述相对位置变化矩阵针对所述初始位姿预测函数的空间卡尔曼增益;根据所述空间卡尔曼增益,获取所述初始预测误差协方差函数对应的第二优化预测误差协方差函数;根据所述第一优化预测误差协方差函数和所述第二优化预测误差协方差函数,获取所述初始预测误差协方差函数对应的所述目标预测误差协方差函数。
15、第二方面,本技术提供了一种机器人定位装置。所述装置包括:
16、融合模块,用于获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;
17、编码模块,用于对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量;
18、第一计算模块,用于根据所述目标机器人在与所述当前时间步相邻的前一时间步的历史编码特征向量与所述当前编码特征向量,获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,以及获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵;
19、第二计算模块,用于根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息。
20、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
21、获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;
22、对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量;
23、根据所述目标机器人在与所述当前时间步相邻的前一时间步的历史编码特征向量与所述当前编码特征向量,获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,以及获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵;
24、根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息。
25、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
26、获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;
27、对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量;
28、根据所述目标机器人在与所述当前时间步相邻的前一时间步的历史编码特征向量与所述当前编码特征向量,获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,以及获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵;
29、根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息。
30、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
31、获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;
32、对所述温度与点云融合特征矩阵进行特征编码,得到所述温度与点云融合特征矩阵的当前编码特征向量;
33、根据所述目标机器人在与所述当前时间步相邻的前一时间步的历史编码特征向量与所述当前编码特征向量,获取所述目标机器人在所述前一时间步与所述当前时间步之间的相对位置变化矩阵,以及获取所述目标机器人在所述前一时间步与所述当前时间步之间的温度特征差异矩阵;
34、根据所述相对位置变化矩阵和所述温度特征差异矩阵,获取所述目标机器人在所述当前时间步的目标当前位姿信息。
35、上述机器人定位方法、装置、计算机设备、存储介质和计算机程序产品中,首先,可以获取目标空间内目标机器人在当前时间步的当前温度与点云融合特征矩阵;接下来,可以对温度与点云融合特征矩阵进行特征编码,得到温度与点云融合特征矩阵的当前编码特征向量;进一步地,可以根据目标机器人在与当前时间步相邻的前一时间步的历史编码特征向量与当前编码特征向量,获取目标机器人在前一时间步与当前时间步之间的相对位置变化矩阵,以及获取目标机器人在前一时间步与当前时间步之间的温度特征差异矩阵;最后,可以根据相对位置变化矩阵和温度特征差异矩阵,获取目标机器人在当前时间步的目标当前位姿信息。本技术实施例提供的该方法中,可以将温度数据和点云数据结合,生成包含温度特征和空间特征的温度与点云融合特征矩阵,可以提高目标机器人对环境的可区分性和定位准确性,并且,可以对温度与点云融合特征矩阵进行特征编码,提高特征提取的准确性,进而,可以提高定位精准度,另外,还可以利用迭代最近点算法和卡尔曼滤波器对目标机器人的位姿进行预测,提高了位姿预测的准确性,进而,可以进一步提高定位准确性、路径规划的效率和准确性、以及对应空间的地图更新准确性。
- 还没有人留言评论。精彩留言会获得点赞!