路线推荐方法、装置、云端设备、存储介质及程序产品与流程
本技术涉及汽车电子,尤其涉及一种路线推荐方法、装置、云端设备、存储介质及程序产品。
背景技术:
1、目前,用户在行驶过程中,需要获取实时路况信息,因此需要对前方的路况进行导航。
2、现有技术中,主要是在导航过程中,预测前方的车辆流向图,进而向用户提供行车建议。
3、但是现有技术中,由于只预测前方的车辆流向图,车辆流向图不能详细的体现出前方多条道路的实际路况,导致用户无法确定最优路线,进而浪费大量行驶时间。
技术实现思路
1、本技术实施例提供一种路线推荐方法、装置、云端设备、存储介质及程序产品,用以达到提高导航路线的准确度的效果。
2、第一方面,本技术实施例提供一种路线推荐方法,包括:
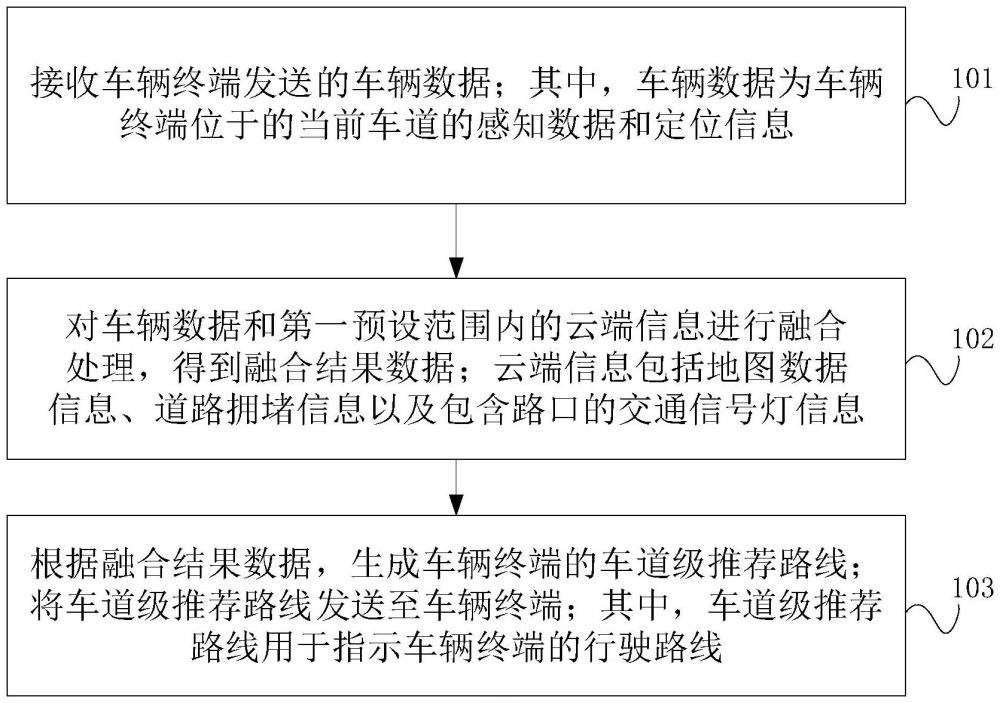
3、接收车辆终端发送的车辆数据;其中,所述车辆数据为所述车辆终端位于的当前车道的感知数据和定位信息;
4、对所述车辆数据和第一预设范围内的云端信息进行融合处理,得到融合结果数据;所述云端信息包括地图数据信息、道路拥堵信息以及包含路口的交通信号灯信息;
5、根据所述融合结果数据,生成所述车辆终端的车道级推荐路线;将所述车道级推荐路线发送至所述车辆终端;其中,所述车道级推荐路线用于指示所述车辆终端的行驶路线。
6、在一种可能的实施方式中,所述感知信息表征所述车辆终端周围的第二预设范围内的感知物的数据;
7、对所述车辆数据和第一预设范围内的云端信息进行融合处理,得到融合结果数据,包括:
8、将所述第一预设范围内的地图数据信息在预设的云端导航数据中进行还原处理,得到所述第一预设范围内的还原的地图数据信息;
9、将所述道路拥堵信息以及包含路口的交通信号灯信息,分别与还原的地图数据信息进行匹配处理,得到匹配结果信息;
10、将所述感知信息在所述云端导航数据中进行还原处理,并将所述感知信息中的各个感知物进行轨迹预测,生成各个感知物在下一时刻的运行轨迹;
11、根据所述匹配结果信息和所述运行轨迹,得到融合结果数据。
12、在一种可能的实施方式中,所述定位信息包括所述车辆终端所在的当前位置;
13、所述根据所述融合结果数据,生成所述车辆终端的车道级推荐路线,包括:
14、根据所述融合结果数据,确定所述当前位置前方的预设距离的第一个转折点的车道信息;
15、根据所述车道信息,确定所述第一个转折点所在的车道,并确定所述车道的终点;
16、根据所述当前位置和所述终点,生成所述车辆终端的车道级推荐路线。
17、在一种可能的实施方式中,该方法还包括:
18、根据预设的监测距离,依次对所述车道级推荐路线上的各段道路进行监测、更新处理,生成更新后的车道级推荐路线。
19、在一种可能的实施方式中,所述根据预设的监测距离,依次对所述车道级推荐路线上的各段道路进行监测、更新处理,生成更新后的车道级推荐路线,包括:
20、根据预设的监测距离,依次对所述车道级推荐路线上的各段道路进行监测,生成各段道路的车道信息;
21、根据各段道路的车道信息,依次确定各段道路内的车道级推荐路线;
22、根据所述车辆终端与所述车道级推荐路线的末端之间的距离,确定所述车道级推荐路线的末端为下一转折点;
23、根据所述下一转折点所在的车道、所述车道的终点,对所述车道级推荐路线进行更新处理,生成更新后的车道级推荐路线。
24、在一种可能的实施方式中,所述第一预设范围内的云端信息的获取方式包括:
25、根据所述车辆数据中的定位信息,在预设的云端导航数据中,确定第一预设范围的地图数据信息;
26、通过预设的服务设备,获取所述第一预设范围内的道路拥堵信息以及包含路口的交通信号灯信息。
27、在一种可能的实施方式中,所述方法还包括:
28、根据所述车辆终端的车道信息,确定所述车辆终端经过的车道的权重值;
29、若确定所述权重值大于预设的权重阈值,则确定所述车辆终端经过的车道为偏离车道,并重新确定车道级推荐路线。
30、第二方面,本技术实施例提供一种路线推荐装置,包括:
31、接收模块,用于接收车辆终端发送的车辆数据;其中,所述车辆数据为所述车辆终端位于的当前车道的感知数据和定位信息;
32、融合模块,用于对所述车辆数据和第一预设范围内的云端信息进行融合处理,得到融合结果数据;所述云端信息包括地图数据信息、道路拥堵信息以及包含路口的交通信号灯信息;
33、生成模块,用于根据所述融合结果数据,生成所述车辆终端的车道级推荐路线;
34、发送模块,用于将所述车道级推荐路线发送至所述车辆终端;其中,所述车道级推荐路线用于指示所述车辆终端的行驶路线。
35、在一种可能的实施方式中,所述感知信息表征所述车辆终端周围的第二预设范围内的感知物的数据;
36、所述融合模块,具体用于:
37、将所述第一预设范围内的地图数据信息在预设的云端导航数据中进行还原处理,得到所述第一预设范围内的还原的地图数据信息;
38、将所述道路拥堵信息以及包含路口的交通信号灯信息,分别与还原的地图数据信息进行匹配处理,得到匹配结果信息;
39、将所述感知信息在所述云端导航数据中进行还原处理,并将所述感知信息中的各个感知物进行轨迹预测,生成各个感知物在下一时刻的运行轨迹;
40、根据所述匹配结果信息和所述运行轨迹,得到融合结果数据。
41、在一种可能的实施方式中,所述定位信息包括所述车辆终端所在的当前位置;
42、所述生成模块,具体用于:
43、根据所述融合结果数据,确定所述当前位置前方的预设距离的第一个转折点的车道信息;
44、根据所述车道信息,确定所述第一个转折点所在的车道,并确定所述车道的终点;
45、根据所述当前位置和所述终点,生成所述车辆终端的车道级推荐路线。
46、在一种可能的实施方式中,所述装置还包括:
47、更新模块,用于根据预设的监测距离,依次对所述车道级推荐路线上的各段道路进行监测、更新处理,生成更新后的车道级推荐路线。
48、在一种可能的实施方式中,所述更新模块,具体用于:
49、根据预设的监测距离,依次对所述车道级推荐路线上的各段道路进行监测,生成各段道路的车道信息;
50、根据各段道路的车道信息,依次确定各段道路内的车道级推荐路线;
51、根据所述车辆终端与所述车道级推荐路线的末端之间的距离,确定所述车道级推荐路线的末端为下一转折点;
52、根据所述下一转折点所在的车道、所述车道的终点,对所述车道级推荐路线进行更新处理,生成更新后的车道级推荐路线。
53、在一种可能的实施方式中,所述装置还包括获取模块,所述获取模块用于获取所述第一预设范围内的云端信息,所述获取模块具体用于:
54、根据所述车辆数据中的定位信息,在云端导航数据中,确定第一预设范围的地图数据信息;
55、通过预设的服务设备,获取所述第一预设范围内的道路拥堵信息以及包含路口的交通信号灯信息。
56、在一种可能的实施方式中,所述装置还具体用于:
57、根据所述车辆终端的车道信息,确定所述车辆终端经过的车道的权重值;
58、若确定所述权重值大于预设的权重阈值,则确定所述车辆终端经过的车道为偏离车道,并重新确定车道级推荐路线。
59、第三方面,本技术实施例提供一种云端设备,包括:存储器,处理器;
60、所述存储器存储计算机执行指令;
61、所述处理器执行所述存储器存储的计算机执行指令,使得所述处理器执行如上第一方面和/或第一方面各种可能的实施方式。
62、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如上第一方面和/或第一方面各种可能的实施方式。
63、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上第一方面和/或第一方面各种可能的实施方式。
64、本技术实施例提供的路线推荐方法、装置、云端设备、存储介质及程序产品,接收车辆终端发送的车辆数据;其中,车辆数据为车辆终端位于的当前车道的感知数据和定位信息。对车辆数据和第一预设范围内的云端信息进行融合处理,得到融合结果数据;云端信息包括地图数据信息、道路拥堵信息以及包含路口的交通信号灯信息。根据融合结果数据,生成车辆终端的车道级推荐路线;将车道级推荐路线发送至车辆终端;其中,车道级推荐路线用于指示车辆终端的行驶路线。本方案中,将车辆终端的实时的车辆数据上传至云端设备;云端设备根据车辆数据获取最新的第一预设范围内的云端信息,并结合车辆数据和云端信息,生成车辆终端的车道级推荐路线,并将车道级推荐路线发送至车辆终端;车辆终端接收到车道级推荐路线时,根据车道级推荐路线进行行驶。所以,将推荐路线的计算放在云端设备,可以参考更多的路况信息与实时信息,同时减少车辆终端的算力消耗,可以使车道级推荐路线计算的更加准确,使得车辆终端可以提高对车道级推荐路线的信任度,以实现完美控车,用以达到提高导航路线的准确度的效果。
- 还没有人留言评论。精彩留言会获得点赞!