绝缘子串检测装置的制作方法
本发明涉及电力,尤其涉及绝缘子串检测装置。
背景技术:
1、绝缘子串在运行中,两端电位差为零的绝缘子,被称为零值绝缘子。通俗地说,一旦出现零值现象,说明绝缘子已击穿,电阻值为零,无法再起到绝缘作用,会严重影响电力安全运行,因此,需定期对运行中的绝缘子进行检测,提前预防出现零值绝缘子。
2、零值绝缘子的检测一直是电力安全运行检测众多项目中较为重要的一环,特别是架空线路上的零值绝缘子带电检测,直接关系着电力输送的安全、稳定。目前,采用地电位作业方式对绝缘子串进行带电检测,通常是由作业人员携带绝缘操作杆登塔作业,作业人员攀登杆塔至指定位置,对绝缘子串由导线侧至横担侧逐片进行检测。检测时,作业人员手持绝缘操作杆,将绝缘操作杆末端的金属丝同时接触绝缘子的两端,利用绝缘子串分布电压,造成火花间隙放电,验证绝缘子是否被击穿。
3、这种人工检测方式不仅费时费力,还带来极大安全隐患。
4、需要说明的是,上述背景技术部分公开的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、针对现有技术中的问题,本发明的目的在于提供绝缘子串检测装置,克服了相关技术中人工检测绝缘子串安全性低的技术问题。
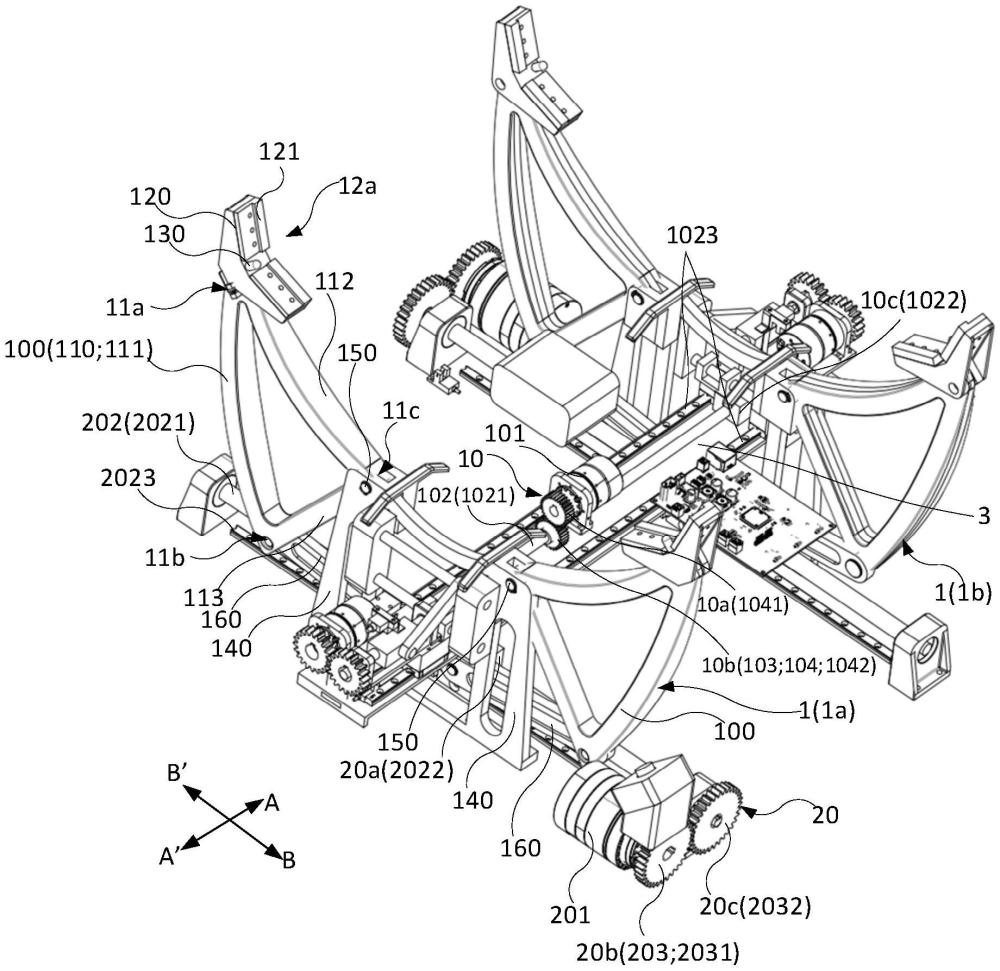
2、本公开实施例提供一种绝缘子串检测装置,其包括:
3、沿第一方向设置的两侧夹爪组件;
4、与两侧夹爪组件配合的第一驱动机构,设置为受控制驱动两侧夹爪组件沿第一方向移动以调整间距;
5、每一侧的夹爪组件包括:
6、沿第二方向设置的两侧夹爪结构,每一侧夹爪结构包括支撑部及夹爪部,两侧夹爪结构通过各自夹爪部的夹爪口沿第二方向相向设置,夹爪口内侧设置有检测端子,第二方向与第一方向垂直;
7、第二驱动机构,与两侧夹爪结构的支撑部传动连接,设置为受控制驱动两侧夹爪结构的夹爪部相向移动至夹合状态及背离移动至张开状态。
8、在一些实施例中,第一驱动机构包括:
9、第一旋转电机,具有第一电机输出端;
10、具有第一旋转输入端和沿第一方向设置的两端第一平动输出端的第一传动机构,通过第一旋转输入端连接第一电机输出端以输入旋转运动,通过两端第一平动输出端连接两侧夹爪组件,第一传动机构设置为,将第一旋转输入端的旋转运动转换成两端第一平动输出端沿第一方向的直线移动。
11、在一些实施例中,第一传动机构为丝杆传动机构,包括:
12、沿第一方向延伸的第一丝杆,沿第一方向分成螺旋方向相反的第一螺纹段和第二螺纹段,在第一丝杆上套装有传动件,传动件被设置为沿第一方向的平动限位,传动件与第一丝杆之间设置为旋转传动配合和沿第一丝杆的滑动配合,第一旋转输入端形成于传动件;
13、与第一螺纹段和第二螺纹段分别通过丝杆传动副连接的两侧第一滑动件,两端第一平动输出端对应形成于两侧第一滑动件。
14、在一些实施例中,支撑部具有自由端、驱动端及固定端,夹爪部与自由端安装;
15、每一侧的夹爪组件还包括固定设置的支撑柱,支撑部通过固定端与支撑柱通过第一转轴进行转动连接,第一转轴与第一方向平行;
16、第二驱动机构具有沿第二方向设置的两端第二平动输出端,每一端的第二平动输出端与相应的支撑部的驱动端之间通过第一连杆进行转动连接;
17、第二驱动机构具体设置为,受控制通过两端第二平动输出端输出沿第二方向的反向直线移动,以通过第一连杆将反向直线移动转换成两侧的支撑部绕第一转轴的反向转动,使得两侧的夹爪部相向移动至夹合状态及背离移动至张开状态。
18、在一些实施例中,支撑部包括第一肋条、第二肋条和第三肋条;第一肋条与第二肋条连接于自由端,第一肋条与第三肋条连接于驱动端,第二肋条与第三肋条连接于固定端;
19、固定端比驱动端沿第二方向靠近另一侧的夹爪结构,第一连杆连接沿第二方向位于同一侧的支撑部的驱动端和第二平动输出端。
20、在一些实施例中,第二驱动机构包括:
21、第二旋转电机,具有第二电机输出端;
22、具有第二旋转输入端和两端第二平动输出端的第二传动机构,通过第二旋转输入端与第二电机输出端进行传动连接;
23、第二传动机构设置为,将第二旋转输入端的转动转换成两端第二平动输出端沿第二方向的反向直线移动。
24、在一些实施例中,第二传动机构为丝杆传动机构,包括:
25、沿第二方向延伸的第二丝杆,沿第二方向分成螺旋方向相反的第三螺纹段和第四螺纹段,第二旋转输入端形成于第二丝杆;
26、与第三螺纹段和第四螺纹段分别通过丝杆传动副组装的两侧第二滑动件,每个第二滑动件与相应侧的第一连杆连接,两端第二平动输出端对应形成于两侧第二滑动件。
27、在一些实施例中,在每一侧的夹爪组件中,两侧夹爪结构及第二驱动机构组装在第一支撑结构中;
28、每一侧的夹爪组件还包括:第三驱动机构及与第三驱动机构组装的第二支撑结构;
29、第一驱动机构与两侧的第二支撑结构进行配合,设置为受控制通过两侧的第二支撑结构驱动两侧夹爪组件沿第一方向移动以调整间距;
30、第二支撑结构与第一支撑结构之间通过第二转轴进行可转动组装,第二转轴平行于第二方向;
31、第三驱动机构与第一支撑结构构成驱动配合,设置为受控制驱动第一支撑结构带动两侧夹爪结构绕第二转轴转动,以调节夹爪组件相比于另一侧夹爪组件的倾斜角度。
32、在一些实施例中,在每一侧夹爪结构中,第三驱动机构具有第三平动输出端,第三平动输出端与第一支撑结构通过第二连杆连接,第二连杆与第一支撑结构通过第三转轴转动连接,第三转轴与第二转轴并列设置,第二连杆垂直于第二方向;
33、第三驱动机构具体设置为,受控制通过第三平动输出端输出沿第一方向的直线移动,以通过第二连杆将直线移动转换成第一支撑结构绕第二转轴的转动,以带动夹爪结构绕第二转轴转动,以调节夹爪组件相比于另一侧夹爪组件的倾斜角度。
34、在一些实施例中,第三驱动机构包括:
35、第三旋转电机,具有第三电机输出端;
36、具有第三旋转输入端和第三平动输出端的第三传动机构,通过第三旋转输入端与第三电机输出端进行传动连接以输入旋转运动;
37、第三传动机构设置为将第三旋转输入端的旋转运动转换成第三平动输出端沿第一方向的直线运动;
38、第三传动机构为丝杆传动机构,包括:沿第一方向延伸的第三丝杆,第三旋转输入端形成于第三丝杆;第三滑动件,与第三丝杆通过丝杆传动副组装,第三平动输出端形成于第三滑动件。
39、本发明的绝缘子串检测装置具有如下优点:
40、使用本实施例的绝缘子串检测装置,通过使一侧夹爪组件夹紧金属帽,接着控制第一驱动机构驱动另一侧夹爪组件在张开状态沿第一方向移动至下一个金属帽,再控制第二驱动机构驱动夹爪结构夹紧该金属帽,以进行绝缘子的零值或者低值检测,即执行绝缘子测零任务。沿着整个绝缘子串,重复上述过程移动绝缘子串检测装置,自动逐个完成整个绝缘子串上的各个绝缘子的检测。
41、本实施方式的绝缘子串检测自动化程度高,整个检测过程可通过控制第一驱动机构和第二驱动机构完成,极大节省人工操作,提升绝缘子串检测的安全性和检测效率。
- 还没有人留言评论。精彩留言会获得点赞!