一种表层土壤动态力学特性表征装置及其方法
本发明涉及农业机械装备,具体为一种表层土壤动态力学特性表征装置及其方法。
背景技术:
1、丘陵山区存在地面崎岖不平、土质松软、土壤含水量高等问题,但是农用机具车轮与丘陵山区崎岖松软地面间的相互作用机理仍不清楚,使得底盘和轮胎设计缺乏理论指导,导致农用机具在丘陵山区存在通过性差、平顺性弱、稳定性低等问题,致使农用机具在移动和作业时易存在振动、陷入、打滑等情况,这制约了丘陵山区农业机械化发展。为了阐明丘陵山地环境下农用机具车轮与崎岖松软地面间的相互作用机理,有必要表征动态(振动)条件下表层土壤力学特性。
2、目前存在三种土壤力学特性表征方法,分别是圆锥贯入试验、贝氏试验、土工试验(直接剪切、三轴压缩等)。由于具有原位描述土壤压力-沉陷关系和剪切应力-剪切位移行为的能力,贝氏试验是表征丘陵山地表层土壤力学特性最适用的方法。中国专利cn103115832b公开了一种土壤承压和剪切试验测试仪,基于贝氏仪测试原理,可利用砝码对压板施加垂直载荷,以进行土壤承压试验,并可利用扭转扳手对剪切环手动施加扭矩,以进行土壤剪切特性试验。由于只能手动调节垂直载荷和扭矩,该专利表征土壤力学特性精度低,并难以施加振动载荷以表征土壤动态力学特性。中国专利cn111735703b公开了一种便携式贝氏仪,设计有三套伺服驱动系统,分别控制直线电缸上下运动以对土壤施加法向力,从而独立测量土壤承压特性;控制伺服电机带动转轴旋转以对土壤施加剪切力,从而独立测量土壤剪切特性。该专利采用伺服系统控制驱动力,可保证较高的土壤力学特性表征精度,但是需采用多套机构分别表征土壤承压和剪切特性,导致装置结构复杂,且并未涉及动态条件下土壤力学特性表征方法和装置。因此,目前缺乏一种表层土壤动态力学特性表征装置及其方法,这阻碍了农用机具车轮与丘陵山区崎岖松软地面间的相互作用机理研究,制约了丘陵山区农业机械化发展。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的是:提供一种表层土壤动态力学特性表征装置及其方法,能够表征动态条件下土壤力学特性,为后续丘陵山地环境下农用机具车轮与崎岖松软地面间的相互作用机理研究奠定基础。
2、为了达到上述目的,本发明采用如下技术方案:
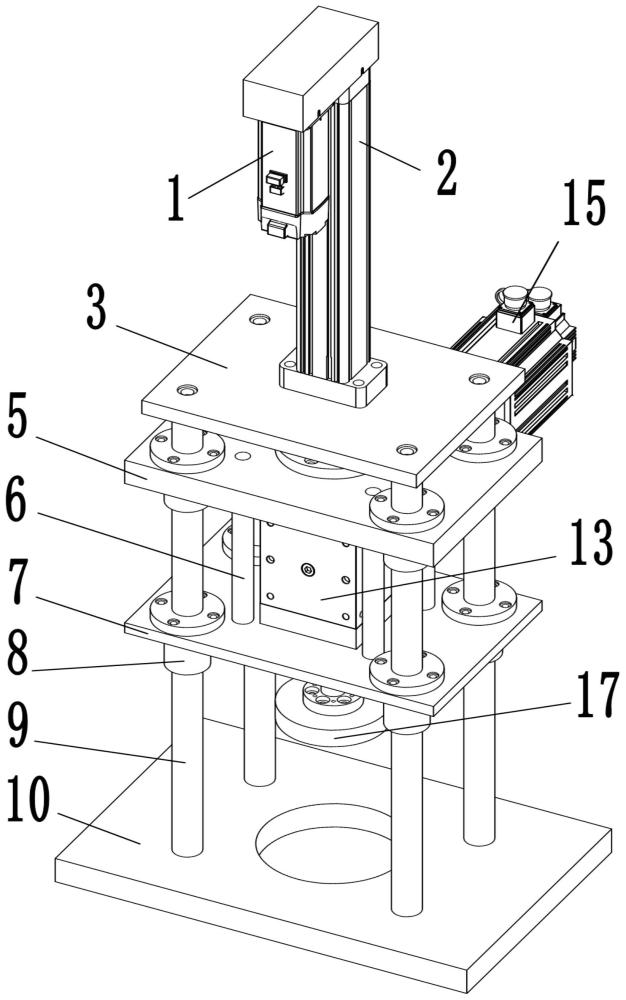
3、一种表层土壤动态力学特性表征装置,包括机架,机架上设有竖向设置的动力轴、压板、剪切环、推力装置和扭矩装置;
4、推力装置连接于动力轴,用于驱使动力轴做上下运动;扭矩装置连接于动力轴,用于驱使动力轴做旋转运动;
5、剪切环或压板选择性地连接于动力轴的下端,压板用于对土壤施加垂直压力,剪切环用于对土壤施加剪切力;
6、其中,当执行土壤常规承压特性测试时,推力装置用于输出恒定压力,以使动力轴向下匀速运动,驱使压板对土壤施加恒定压力;
7、当执行土壤动态承压特性测试时,推力装置用于输出振动压力,以使动力轴向下振动运动,驱使压板对土壤施加周期性波动压力;
8、当执行土壤常规剪切特性测试时,推力装置用于输出恒定压力且扭矩装置输出旋转扭矩,以使动力轴驱使剪切环对土壤施加恒定压力的同时施加剪切力;当执行土壤动态剪切特性测试时,推力装置用于输出振动压力且扭矩装置输出旋转扭矩,以使动力轴驱使剪切环对土壤施加周期性波动压力的同时施加剪切力。
9、进一步,推力装置包括第一伺服电机、电动缸和法向力传感器,第一伺服电机固定在电动缸上;电动缸固定在机架上,电动缸的轴端与法向力传感器相连;法向力传感器与动力轴相连,动力轴转动连接于法向力传感器。
10、进一步,机架包括顶板、滑动拉杆和底板,滑动拉杆的上下两端分别固接于顶板和底板,顶板与底板平行设置,电动缸固接于顶板的中部且穿设于顶板,底板的中部设有容许剪切环或压板通过的通孔。
11、进一步,顶板与底板之间设有滑动上横梁、支撑杆和滑动下横梁,支撑杆的上下两端分别固接于滑动上横梁和滑动下横梁,滑动上横梁和滑动下横梁分别滑动连接于滑动拉杆,滑动上横梁和滑动下横梁中安装有一对圆锥滚子轴承;动力轴安装于圆锥滚子轴承中,法向力传感器与滑动上横梁相连。
12、进一步,扭矩装置包括水平设于动力轴一侧且依次连接的第二伺服电机、扭矩传感器与直角换向器;直角换向器固定在滑动下横梁上并通过平键与动力轴配合,以将第二伺服电机输出的水平方向的扭矩转换到垂直方向传递给动力轴。
13、一种表层土壤动态力学特性表征方法,包括以下步骤,
14、当执行土壤常规承压特性测试时,推力装置输出恒定压力,使动力轴向下匀速运动,以驱使压板对土壤施加恒定压力,探索不同压力p和不同深度z间的对应关系,建立土壤常规承压特性p-z曲线;
15、当执行土壤动态承压特性测试时,推力装置输出振动压力,使动力轴向下振动运动,以驱使压板对土壤施加周期性波动压力,探索不同压力p和不同深度z间的对应关系,建立土壤动态承压特性p-z曲线;
16、当执行土壤常规剪切特性测试时,推力装置输出恒定压力且扭矩装置输出旋转扭矩,使动力轴驱使剪切环对土壤施加恒定压力的同时施加剪切力,探索不同压力p下旋转角度θ和扭矩t间的对应关系,建立土壤常规剪切特性θ-t曲线;
17、当执行土壤动态剪切特性测试时,推力装置输出振动压力且扭矩装置输出旋转扭矩,使动力轴驱使剪切环对土壤施加周期性波动压力的同时施加剪切力,探索不同压力p下旋转角度θ和扭矩t间的对应关系,建立土壤动态剪切特性θ-t曲线。
18、进一步,土壤常规承压特性测试的步骤为,设定压板的运动速度v和对土壤施加的垂直压力p,并传递给可编程逻辑控制器;可编程逻辑控制器产生恒定的速度v和压力p模拟量信号,并实时传递给第一驱动器;第一驱动器控制第一伺服电机,使压板以恒定速度v为控制量匀速向下运动;当压板接触土壤后,法向力传感器反馈的压力值pf将随着压板陷入土壤的深度的增加而持续上升;数据采集系统记此时位置z和时间t均为0,并开始记录时间t和速度vf;当压力值pf达到压力设定值p后,第一驱动器控制第一伺服电机,使压板以恒定压力p为控制量继续向下运动,直至速度降至0;数据采集系统停止记录时间t和速度vf;确定压板陷入土壤的深度为,并以此建立压力p和陷入土壤深度z间的对应关系;多次进行上述步骤,探索不同压力p和不同深度z间的对应关系,即可建立土壤常规承压特性p-z曲线。
19、进一步,土壤动态承压特性测试的步骤为,设定压板的运动速度v、对土壤施加的垂直压力p、振动频率f、振幅a,并传递给可编程逻辑控制器;可编程逻辑控制器产生周期性波动的速度和压力模拟量信号,并实时传递给第一驱动器;第一驱动器控制第一伺服电机,使压板以周期性波动的速度为控制量向下振动运动;当压板接触土壤后,法向力传感器反馈的压力值pf将随着压板陷入土壤的深度的增加而持续上升;数据采集系统记此时位置z和时间t均为0,并开始记录时间t和速度vf;当压力值pf达到压力设定值p后,第一驱动器控制第一伺服电机,使压板以周期性波动的压力为控制量继续向下振动运动,直至速度降至0附近,数据采集系统停止记录时间t和速度vf;确定压板陷入土壤的深度为,并以此建立压力p和陷入土壤深度z间的对应关系;多次进行上述步骤,探索不同压力p和不同深度z间的对应关系,即可建立土壤动态承压特性p-z曲线。
20、进一步,土壤常规剪切特性测试的步骤为,设定剪切环的运动速度v、对土壤施加的垂直压力p、旋转速度ω、旋转扭矩t,并传递给可编程逻辑控制器;可编程逻辑控制器产生恒定的速度v和压力p模拟量信号,并实时传递给第一驱动器;可编程逻辑控制器产生转速ω和扭矩t的模拟量信号,并实时传递给第二驱动器;第一驱动器控制第一伺服电机,使剪切环以恒定速度v为控制量匀速向下运动;当剪切环接触土壤后,法向力传感器反馈的压力值pf将随着剪切环陷入土壤的深度的增加而持续上升;当压力值pf达到压力设定值p后,第一驱动器控制第一伺服电机,使剪切环以恒定压力p为控制量继续向下运动,直至速度降至0,第一驱动器继续控制剪切环,以对土壤持续施加恒定压力p;数据采集系统记录此时转角θ和时间t均为0,并开始记录时间t、转速ωf、扭矩值tf;第二驱动器控制第二伺服电机,使剪切环以转速ω为控制量旋转,直至扭矩值tf不再增加,即此时土壤已被剪断;数据采集系统停止记录记录时间t、转速ωf、扭矩值tf;确定剪切环旋转的角度为,并以此建立旋转角度θ和扭矩t之间的对应关系;多次进行上述步骤,探索不同压力p下旋转角度θ和扭矩t间的对应关系,即可建立土壤常规剪切特性θ-t曲线。
21、进一步,土壤动态剪切特性测试的步骤为,设定剪切环的运动速度v、对土壤施加的垂直压力p、旋转速度ω、旋转扭矩t、振动频率f、振幅a,并传递给可编程逻辑控制器;可编程逻辑控制器产生周期性波动的速度和压力模拟量信号,并实时传递给第一驱动器;可编程逻辑控制器产生转速ω和扭矩t的模拟量信号,并实时传递给第二驱动器;第一驱动器控制第一伺服电机,使剪切环以周期性波动的速度为控制量向下振动运动;当剪切环接触土壤后,法向力传感器反馈的压力值pf将随着剪切环陷入土壤的深度的增加而持续上升;当压力值pf达到压力设定值p后,第一驱动器控制第一伺服电机,使剪切环以周期性波动的压力为控制量继续向下振动运动,直至速度降至0附近;第一驱动器继续控制剪切环,以对土壤持续施加周期性波动的压力;数据采集系统记录此时转角θ和时间t均为0,并开始记录时间t、转速ωf、扭矩值tf;第二驱动器控制第二伺服电机,使剪切环以转速ω为控制量旋转,直至扭矩值tf不再增加,数据采集系统停止记录时间t、转速ωf、扭矩值tf;确定剪切环18旋转的角度为,并以此建立旋转角度θ和扭矩t之间的对应关系;多次进行上述步骤,探索不同压力p下旋转角度θ和扭矩t间的对应关系,即可建立土壤动态剪切特性θ-t曲线。
22、总的说来,本发明具有如下优点:
23、1、不仅能够提供土壤承压特性测试所需的直线运动,还可以提供土壤剪切特性测试所需的扭转运动,使得土壤力学特性表征装置具有结构简单、稳定性好、可靠性高等特点。
24、2、采用伺服电机控制系统,使表征全过程自动化,具有操作简单、测量准确等特点。
25、3、具有表征动态条件下土壤力学特性的能力,能够为后续丘陵山地环境下农用机具车轮与崎岖松软地面间的相互作用机理研究奠定基础。
- 还没有人留言评论。精彩留言会获得点赞!