一种生物安全柜质量检测系统及其方法与流程
本发明属于检测,尤其涉及一种生物安全柜质量检测系统及其方法。
背景技术:
1、生物安全柜质量检测作为微生物实验室检验生物安全柜是否有泄漏的重要设备,通常通过碘化钾方法进行检测。传统的质量检测方法通常是将气溶胶发生器放置在生物安全柜内,使生物安全柜内充满碘化钾的气溶胶后,再将滤纸放于空气采样器内,然后用风机产生负压,让空气采样器吸取生物安全柜前方的空气,检测是否有碘化钾附着再滤纸上,从而检测是否有泄漏。
2、现有技术不足:
3、传统检测系统往往通过单一类型的传感器(如压力传感器)监测某一关键参数,从而表现系统的工作状态,例如主风道负压,其对误差精度的估计不高。
4、在对自身进行自检校准的时候,未能考虑环境参数(如温湿度)和传感器自身误差对整体性能的影响,使得系统整体性能下降。
技术实现思路
1、本发明的目的是提供一种生物安全柜质量检测系统及其方法,解决了动态分析主风道与支风道流量的一致性,提供系统的全局吸入气流量分布的准确信息的技术问题。
2、为实现上述目的,本发明采用如下技术发明:
3、一种生物安全柜质量检测系统,包括检测装置和上位机,检测装置通过无线网络或数据线与上位机通信;
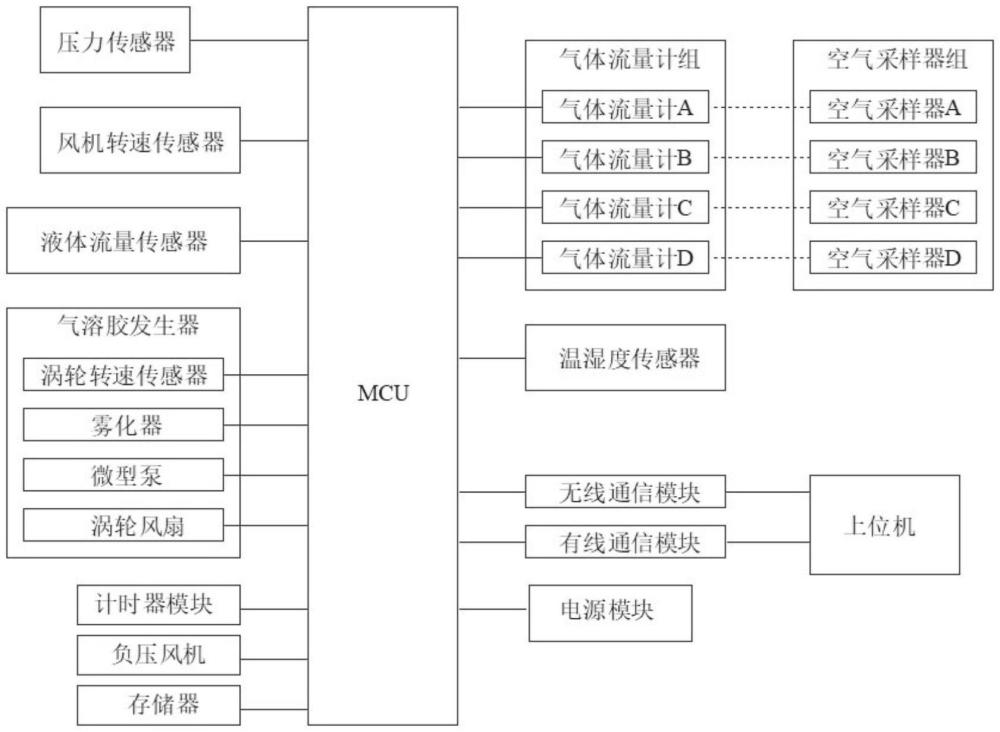
4、检测装置包括mcu、温湿度传感器、压力传感器、风机转速传感器、液体流量传感器、气溶胶发生器、计时器模块、负压风机、存储器、空气采样器组、气体流量计组、无线通信模块、有线通信模块和电源模块;
5、温湿度传感器、压力传感器、风机转速传感器、液体流量传感器、气溶胶发生器、计时器模块、负压风机、存储器、气体流量计组、无线通信模块和有线通信模块均与mcu电连接;
6、气溶胶发生器包括涡轮风扇、微型泵、雾化器和涡轮转速传感器,mcu通过不同io口连接涡轮风扇、微型泵和雾化器,涡轮转速传感器连接mcu的一个io口,用于检测涡轮风扇的转速;液体流量传感器用于检测微型泵所吸入的液体流量;
7、压力传感器用于检测负压风机所产生的负压;风机转速传感器用于检测负压风机的转速;
8、气体流量计组包括4个气体流量计,即气体流量计a、气体流量计b、气体流量计c和气体流量计d;气体流量计a、气体流量计b、气体流量计c和气体流量计d分别与mcu的不同的ad接口连接;
9、空气采样器组包括4个空气采样器,即空气采样器a、空气采样器b、空气采样器c和空气采样器d;气体流量计a、气体流量计b、气体流量计c和气体流量计d分别用于检测从空气采样器a、空气采样器b、空气采样器c和空气采样器d所吸入的气流量。
10、优选的,所述mcu的型号为stm32f407zgt6,所述气体流量计a、所述气体流量计b、所述气体流量计c和所述气体流量计d的型号均为fs400a热式质量流量传感器;
11、所述压力传感器的型号为mprls0025pa00001a,风机转速传感器的型号为tle4905霍尔效应传感器,涡轮转速传感器的型号为a3144霍尔效应传感器,液体流量传感器的型号为yf-s401霍尔效应液体流量传感器;
12、温湿度传感器的型号为aht20-f,用于检测环境温湿度。
13、优选的,所述mcu通过一个驱动模块a来驱动负压风机,负压风机为直流电机;驱动模块为ir2104半桥驱动器;
14、所述mcu通过驱动模块b来驱动涡轮风扇,涡轮风扇为直流电机驱动的风扇,驱动模块b的型号为tle5206双极性直流电机驱动器;
15、所述mcu通过驱动模块c来驱动微型泵,驱动模块c的型号为dr v8833双h桥直流电机驱动器。
16、优选的,所述无线通信模块的型号为esp32芯片,所述有线通信模块的型号为rs485模块,所述计时器模块为mcu的内部定时器,所述电源模块为开关电源ac-dc转换器,所述存储器的型号为at45db321d-flash存储器。
17、一种生物安全柜质量检测方法,包括如下步骤:
18、步骤1:部署一种生物安全柜质量检测系统,在部署过程中,将气溶胶发生器放置于生物安全柜内,mcu控制开启气溶胶发生器;
19、负压风机则固定设置在一个主风道内,空气采样器a、空气采样器b、空气采样器c和空气采样器d分别设于4个支风道的风道口,4个支风道均与主风道连通;
20、上电后,mcu完成初始化,开启负压风机,负压风机在主风道内产生负压;
21、空气采样器a、空气采样器b、空气采样器c和空气采样器d分别放置在生物安全柜前方不同的位置,通过负压吸取生物安全柜前方不同位置的空气;
22、气体流量计a、气体流量计b、气体流量计c和气体流量计d采集的数据分别为流量q1、流量q2、流量q3和流量q4;
23、主风道内的压力由压力传感器负责采集,其数据为压力pm;
24、负压风机的转速由风机转速传感器采集,其数据为转速nf;
25、步骤2:mcu计算主风道的总流量qtotal,校验主风道流量和支风道流量的一致性,输出流量一致性偏差δqconsistency,根据总流量动态计算标准流vstd;
26、比较每一个支风道流量qi与vstd的误差,选择误差最小的支风道作为标注支风道qref;同时输出每一个支风道流量误差值qerror,i,i为支风道的编号;
27、步骤3:mcu获取到压力pm、转速nf、流量q1、流量q2、流量q3、流量q4,以及温湿度传感器获取的环境温度t和湿度h后,使用卡尔曼滤波算法融合多传感器数据,减小单一传感器的误差,并基于温湿度数据对传感器读数进行动态补偿,输出动态补偿后的流量数据qi,comp,i为支风道的编号;
28、每次运行前,mcu均执行各个传感器的自校准,将校准数据上传至上位机,提示定期维护;
29、步骤4:对于气溶胶发生器,mcu获取液体流量传感器采集的流量qliquid,同时获取涡轮转速传感器采集的转速nturbo;
30、根据流量qliquid和转速nturbo计算气溶胶生成效率,动态调整涡轮转速和泵速;
31、步骤5:mcu通过无线通信模块或有线通信模块,将支风道流量误差qerror,i、流量一致性偏差δqconsistency、温度t和湿度h上传给上位机,上位机保存并生成数据日志,显示报警状态和测量结果。
32、优选的,在执行步骤2时,具体包括如下步骤:
33、步骤2-1:计算主风道总流量qtotal:
34、qtotal=q1+q2+q3+q4;
35、步骤2-2:主风道流量校验,具体为通过风机特性曲线函数f(pm,nf),校验主风道流量是否合理:
36、δqf=qtotal-f(pm,nf);
37、本实施例中,风机特性曲线函数f(pm,nf)是根据风机制造商会提供其风机在不同转速nf和压力pm下的性能数据得到的曲线。
38、若∣δqf∣>δqthreshold,则触发报警,mcu产生报警信息,δqthreshold为预设报警阈值,δqf为计算出的校验值;
39、步骤2-3:具体为根据主风道流量qtotal动态计算标准流量:
40、vstd=(qtotal÷4)×cadjust;
41、其中,cadjust为调节因子;
42、步骤2-4:比较每个支风道流量qi与vstd的误差qerror,i:
43、qerror,i=qi-vstd;
44、选取∣qerror,i∣最小的支风道标注支风道qref;
45、步骤2-4:校验支风道流量之和与主风道流量的差异δqconsistency:
46、
47、若∣δqconsistency∣>δqthreshold,则触发报警,mcu生成报警信息;δqthreshold为预设阈值。
48、优选的,在执行步骤3时,具体包括如下步骤:
49、步骤3-1:mcu获取传感器数据:从压力传感器读取主风道压力pm,计算得到压力pm的测量误差协方差rp;
50、从风机转速传感器读取转速nf,计算nf的测量误差协方差rn;
51、采集支风道流量数据,从4个气体流量计分别读取4个支风道流量,qi,i是支风道编号,i在计算时取值为1,2,3,4;每个流量计的测量误差协方差为
52、步骤3-2:进行初步状态预测,包括预测主风道总流量和预测误差协方差矩阵:
53、预测主风道总流量:使用转速nf和压力pm估算主风道总流量qpred:
54、
55、其中,cf风机的流量系数,通过标定确定;
56、预测误差协方差矩阵:对应状态预测的不确定性ppred:
57、ppred=qf+rp;
58、其中,qf是系统的状态噪声协方差;
59、步骤3-3:进行卡尔曼滤波更新,包括卡尔曼增益计算、状态更新和误差协方差更新:
60、卡尔曼增益计算:结合主风道压力pm和支风道流量qi的测量值,计算增益kk;
61、kk=ppred×ht×(h×ppred×ht+r)-1;
62、其中,h为观测矩阵,映射状态到测量值,即单位矩阵,r为测量噪声协方差矩阵,包含rp和rqi,t表示倒置;
63、状态更新:根据传感器测量值修正预测值:
64、qtotalx=qpred+kk×(zk-h×qpred);
65、zk为传感器观测值,即实际支风道和主风道流量测量值;该公式中的qtotalx为修正后的主风道流量;
66、误差协方差更新:更新状态的不确定性范围pupdated:
67、pupdated=(i-kk×h)×ppred;
68、其中i为系统状态维度的单位矩阵,用于在卡尔曼滤波更新公式中抵消更新步骤的误差;
69、步骤3-4:mcu进行支风道流量修正:利用主风道总流量qtotalx和支风道流量qi,校正支风道的流量:
70、
71、qi,corrected为矫正值;
72、步骤3-4:mcu根据温度t和湿度h对传感器数据进行补偿:
73、qi,comp=qi×(1+αt×(t-tref)+αh×(h-href));
74、其中,αt和αh分别为温度补偿系数和湿度补偿系数,t为当前环境温度,h为当前环境温度,tref为传感器标定时的标准环境温度,href为传感器标定时的标准环境湿度,qi,comp为补偿值;
75、步骤3-5:每次运行前,mcu根据步骤3-1到步骤3-4的方法,执行传感器自校准程序,生成校准数据,并上传到上位机。
76、优选的,在执行步骤4时,具体步骤如下:
77、步骤4-1:mcu获取关于气溶胶发生器的数据,包括流量qliquid和转速nturbo;
78、步骤4-2:计算气溶胶生成效率ηaerosol:
79、
80、其中,ρliquid是液体的密度;
81、步骤4-3:mcu根据生成效率ηaerosol和目标效率ηtarget,调整涡轮的转速,调整值为nturbo,new:
82、nturbo,new=nturbo+kp×(ηtarget-ηaerosol);
83、目标效率ηtarget为预设值。
84、本发明所述的一种生物安全柜质量检测系统及其方法,解决了动态分析主风道与支风道流量的一致性,提供系统的全局吸入气流量分布的准确信息的技术问题,本发明采用卡尔曼滤波算法融合压力传感器、流量计和转速传感器的多源数据,减少单一传感器误差带来的影响,确保流量数据的精确性,引入温湿度传感器,实时采集环境温湿度数据,对流量和压力读数进行动态补偿,显著提升系统在不同环境条件下的适应性和数据稳定性,系统支持传感器的自动校准,每次运行前检测和校正关键传感器的偏差,并上传校准数据至上位机,同时提示传感器的定期维护需求,延长设备寿命,通过无线或有线通信模块,将检测数据实时上传至上位机,支持数据日志生成、报警提示和分析结果显示,实现系统的智能化和实时监控能力,通过主风道和支风道的多点流量监测,动态分析主风道与支风道流量的一致性,确保得到系统的全局流量分布的准确信息,同时实现异常流量分布的快速报警,结合涡轮转速和液体流量数据,实时计算气溶胶生成效率,自动调整涡轮风扇与微型泵的工作参数,确保生成效率稳定,满足不同实验需求,系统内置异常阈值判断机制,对主风道流量、支风道流量、压力及气溶胶生成效率的异常情况实时监测并报警,提升设备运行的可靠性与安全性。
- 还没有人留言评论。精彩留言会获得点赞!