使用纠缠光子直接测量不平衡的光学路径的制作方法
使用纠缠光子直接测量不平衡的光学路径
1.关于联邦赞助研究或开发的声明
2.本发明是按照15-c-0285在政府资助下进行的。政府拥有本发明的某些权利。
背景技术:
3.绕地球飞行的卫星可彼此通信以使不同卫星上的时钟同步。通常,为了精确的时钟同步,卫星可使用干涉测量法来确立卫星的相对位置。卫星通常使用卫星和原子时钟的相对位置来提供准确的时间和频率标准。原子钟用于国际时间的分配,用于控制广播的信号的频率,并且用于全球导航卫星系统(gnss)诸如全球定位系统(gps)、格洛纳斯系统(glonass)、北斗系统(beidou)或伽利略系统(galileo)中。在一些卫星星座中,可能不能以允许原子钟同步到期望水平的精度获知卫星的相对位置。
技术实现要素:
4.本发明提供了使用纠缠光子直接测量不平衡的光学路径的系统和方法。系统包括光源,该光源用于生成一对同时产生的光子。该系统还包括第一发射器/接收器,该第一发射器/接收器朝向第一远程反射器发射该对光子中的第一光子,并且接收由第一远程反射器反射的第一光子,该第一光子沿着第一光学路径行进。另外,该系统包括第二发射器/接收器,该第二发射器/接收器朝向第二远程反射器发射该对光子中的第二光子,并且接收由第二远程反射器反射的第二光子,该第二光子沿着第二光学路径行进。另外,该系统包括用于将反射的第一光子和反射的第二光子组合到第一输出端口和第二输出端口中的模式组合器。此外,该系统包括多个光检测器,该多个光检测器检测来自第一输出端口的光子和来自第二输出端口的光子。另外,该系统包括执行可执行代码的处理器,该可执行代码使得处理器基于来自多个光检测器的信号的到达时间差来测量第一光学路径和第二光学路径之间的时延差。
附图说明
5.应当理解,附图仅示出了一些实施方案,因此不应认为是限制范围,将使用附图以附加特征和细节来描述示例性实施方案,在附图中:
6.图1是示出根据本公开的一个方面的示例性干涉仪的示意图;
7.图2是示出根据本公开的一个方面的使用纠缠光子进行动态光学干涉仪锁定的示例性系统的框图;
8.图3是示出根据本公开的一个方面的芯片级设备中的不同路径的示意图;
9.图4是示出根据本公开的一个方面的用于光子对的接收的不同光学路径的示意图;
10.图5是示出根据本公开的一个方面的用于调节具有大延迟的光学路径的方法的示意图;
11.图6是示出根据本公开的一个方面的光源和远程反射器的网络的框图;并且
12.图7是根据本公开的一个方面的使用纠缠光子进行动态光学干涉仪锁定的流程图。
13.按照惯例,所描述的各种特征未必按比例绘制,而是为了强调与示例性实施方案相关的特定特征而绘制的。
具体实施方式
14.在以下详细描述中,参考形成其一部分的附图,并且其中通过图示方式示出了特定的例示性实施方案。然而,应当理解可能利用其他实施方案,并且可能进行逻辑、机械和电气更改。
15.本文描述了使用纠缠光子直接测量不平衡的光学路径的系统和方法。在某些实施方案中,系统产生几乎在相同时刻“诞生”的两个“孪生”光子。孪生光子可用于实现中央光源与两个远程位置之间(例如,源卫星与两个远程定位卫星之间)的两个光学路径长度的实时锁。源可通过朝向远程位置处的反射器投射孪生光子来获取锁。源可接收反射的光子并且在hong-ou-mandel(hom)干涉仪内重组这些光子。连接到干涉仪的计算设备可直接测量由于不平衡的光学路径引起的孪生光子的到达时间差。源可使用直接测量来调节光学路径以有利于光学路径的平衡。
16.在一些系统中,两个光检测器可同时接收孪生光子并向定时模块提供电信号以用于比较它们的到达时间。如果在光检测器上同时接收两个光子,则定时模块可记录每个光检测器上的一个光子的重合检测率的消失。另选地,如果在不同时间在光检测器上接收孪生光子,则定时模块可观察到孪生光子的可测量的重合检测率。一些系统中的计算设备可识别重合检测率的消失以使源与两个远程位置之间的光学路径链路同步。
17.通常,远程位置与源位置之间的延迟在很大程度上是未知的,并且不同卫星之间的距离之间的差值可能在很大程度上是未知的。在这些情况下,识别孪生光子的同时到达所引起的凹陷可能特别有挑战性。例如,凹陷的宽度可具有亚皮秒宽度,并且未知的测距距离可相对地较大(》10-100m)。系统可通过监测连续获取的带时间标记的光子检测流以通过分析干涉仪的两个检测器的时间-延迟直方图来直接测量大的路径差值(潜在地大于数百米)从而对大范围的延迟作出解释。
18.在一些实施方案中,在测量飞行时间的路径差值之后,该系统可在具有较短飞行时间的路径中添加延迟。因此,系统可在不利用孪生光子的量子干涉的情况下识别光子路径的差值。另外,该系统可识别路径的差值而不精确地测量光子的单独飞行时间。在添加延迟之后,如果飞行时间在所需精度内仍然不平衡,则其他系统可能能够最终调节飞行时间的差值。另外,该系统可监测路径长度并且根据需要进行调节以保持不同时钟的同步。
19.图1是示出用于hong-ou-mandel(hom)干涉仪的系统100的示意图。本文所述的系统可结合hom干涉仪。如本文所用,hom干涉仪是使用hom效应来测量两个所接收的光子的特性的设备。系统100可产生泵浦光子101。系统100可将泵浦光子101分离成两个孪生光子103(本文单独地称为光子103-a和103-b)。例如,泵浦光子101可由激光源产生,该激光源产生具有405nm波长或其他潜在波长的光子。
20.在某些实施方案中,泵浦光子101分离成孪生光子103,这些孪生光子被引导穿过用于重组的光学结构。例如,由光学结构105将泵浦光子101分离成孪生光子103-a和103-b。
孪生光子103-a和103-b可各自具有泵浦光子101的波长两倍的波长(即,其中泵浦光子可具有405nm的波长,孪生光子103-a和103-b可各自具有810nm的波长)。另外,系统100可包括引导光学器件107,这些引导光学器件将孪生光子103-a和103-b引导到检测器109以用于孪生光子103-a和103-b的接收。例如,检测器109-a可接收并检测孪生光子103-a,并且检测器109-b可接收并检测孪生光子103-b。
21.在一些实施方案中,当检测器109接收到相关联的孪生光子103时,检测器109可向定时模块111提供信号,其中定时模块111比较电信号的到达时间以确定到达的重合度。定时模块111可尝试识别可插入光学路径中的一者或两者中的延迟,以使得由光检测器提供的信号的重合率朝向零下降。例如,当光检测器在基本相同的时间检测到孪生光子103时,光检测器所提供的信号的重合率可朝向零下降。该朝向零下降被称为轨迹图113中所示的hom凹陷。当两个孪生光子103在所有特性方面都基本上相同并且在分离器110处重组时,出现凹陷。当这些光子变得可区分时,hom凹陷消失。
22.系统100及本文所述的其他系统可在更大系统内用于使原子钟同步。例如,hom干涉测量法可提供跨leo或meo卫星星座稳妥地分布的飞秒精度时基。本文所公开的系统和设备的一个优点是相位同步接收器阵列的使用。分布在大区域内的相位同步接收器可通过以下方式改善卫星所获取的图像的分辨率:由更小孔径的分散集合形成大孔径,从而突破单独更小孔径的衍射极限。超高分辨率成像可支持从稀疏孔径成像到地理定位再到地面移动目标指示的多种任务。该系统的附加优点包括实时计算干涉测量法。例如,返回信号可在获取期间同步并且可在图像上实现比收集后平均化更好的信噪比。另外的优点可包括主动波束成形,其中脉冲的功率可集中到比用任何一个卫星的天线的角度分辨率可实现的区域更小的区域中。主动波束成形不仅将提高返回信号的信噪比,而且将减少信号溢出和目标暂留时间,因此增加实现过程的隐蔽性。另外,接收器阵列对单点攻击更具弹性并且可被配置为针对不同特定任务剖面进行优化。
23.如上所述,使用hom干涉测量法进行的hom凹陷的识别和不同卫星的同步具有许多不同应用。然而,这些应用可依赖于以亚毫米级的精度平衡干涉仪的不同光学路径。将远程定位卫星的不同光学路径平衡到高精度水平可能是困难的,尤其是当路径相差很大距离时。本文所述的系统和方法对不同卫星(或其他远程定位的设备)之间的光学路径进行调节,以有利于光学路径的平衡。
24.图2是平衡系统200的框图。平衡系统200可使用各种部件来平衡光源和接收器206与单独远程反射器207和209之间的不同光学路径。另外,平衡系统200可为平衡网络的一部分,该平衡网络可使多个源之间的时间同步。下文更详细地描述了平衡网络。光源和接收器206可朝向远程反射器207发射第一孪生光子,并且朝向远程反射器209发射第二孪生光子。在某些网络中,光源和接收器206可为卫星,并且远程反射器207和209可为不同的远程定位卫星。另选地,光源和接收器206可为能够发射孪生光子的设备,并且远程反射器207和209可为能够接收孪生光子并且朝向光源和接收器206反射孪生光子的单独设备。
25.在某些实施方案中,光源和接收器206可包括光子源201。光子源201可为生成光子并且将光子分离成两个孪生光子的设备。光子源201可为激光生成设备或其他能够生成孪生光子的设备。例如,光子源201可使用自发参量下转换(spdc)来产生相关或纠缠光子对。当光子源201生成孪生光子时,光子源可向第一发射器/接收器203提供第一孪生光子并且
向第二发射器/接收器205提供第二孪生光子。第一发射器/接收器203和第二发射器/接收器205可为发射并接收光子的设备。例如,发射器/接收器可为可使光子朝向相应远程反射器聚焦和引导并且还接收从相应远程反射器反射的光子的光学设备组合。例如,第一发射器/接收器203可朝向远程反射器207发射光子。另外,当远程反射器207朝向光源和接收器206反射光子时,第一发射器/接收器203可接收反射的光子。类似地,第二发射器/接收器205可朝向远程反射器209发射光子。另外,当远程反射器209朝向光源和接收器206反射光子时,第二发射器/接收器205可接收反射的光子。
26.在一些实施方案中,当第一发射器/接收器203接收到从远程反射器207反射的第一孪生光子并且第二发射器/接收器205接收到从远程反射器209反射的第二孪生光子时,第一发射器/接收器203和第二发射器/接收器205可向模式组合器211提供所接收的孪生光子。在某些具体实施中,第一发射器/接收器203和第二发射器/接收器205可充当多个设备,其中光子由第一类型的设备发射并且由第二类型的设备接收。另选地,第一发射器/接收器203和第二发射器/接收器205可包括这样的设备(如环行器),其在第一端口上接收用于发射的相应光子,在第二端口上朝向远程反射器发射光子并从远程反射器接收光子,并且在第三端口上向模式组合器211提供所接收的光子。
27.在一些实施方案中,模式组合器211可包括被引导到光检测器221和223上的多个输出。光检测器可将所接收的光转换为电信号并且向定时模块213提供电信号。定时模块213(与图1中的定时模块111类似)可组合所接收的电信号并且对所接收的电信号执行干涉测量法。然后定时模块213可提供表示电信号到达光源和接收器206内的定时模块213的重合结果的数据。
28.在另外的实施方案中,定时模块213可为可从干涉数据获取定时信息的设备。如本文所述,定时信息可指描述从第一孪生光子入射到第一光检测器221上和第二孪生光子入射到第二光检测器223上时起的时间的差值的信息。另外,定时信息可指与孪生光子在相应光检测器上的重合率有关的信息。定时模块213可向处理器215提供所获取的定时信息。在一些实施方案中,定时模块213可为处理器215上执行的功能。在其他实施方案中,定时模块213可在与处理器215分开的计算设备上实现。
29.在某些实施方案中,处理器215可使用来自定时模块213的定时信息基于孪生光子的入射时间的差值来识别延迟。使用所识别的延迟,处理器215可确定要对光子源201与第一发射器/接收器203和第二发射器/接收器205中的一者或两者之间的路径长度进行的调节,使得光子源201与远程反射器207之间的路径长度以及光子源201与远程反射器209之间的路径长度基本上相等。如本文所用,当第一光检测器221和第二光检测器223处的孪生光子的检测的重合率朝向零下降时,不同光学路径基本上相等,如上文就hom凹陷所描述。
30.在一些实施方案中,与这些路径在hom凹陷(诸如亚毫米范围内的宽度)方面基本上相等的路径长度的最大差值相比,光子源201与相应远程反射器207和远程反射器209之间的路径长度的差值可基本上更大(》10m-100m)。因此,为了针对初始路径长度差值的宽泛范围实现路径长度的精确均衡,处理器215可调节路径长度以有利于精细调节。具体地,处理器215可确定控制调节器219中的致动器的调节。调节器219可以是能够对不同光学路径进行大的改变以有利于对不同光学路径进行小的改变的设备。当处理器215确定光学路径长度之间的差值基本上较大时,处理器215可控制调节器219以改变光学路径,使得光学路
径长度之间的差值在精细调节范围内。
31.另外,一旦处理器215已控制调节器219以将光学路径长度之间的差值调节为精细调节范围内,处理器215就可监测模式组合器211所观察到的重合率以监测并调节不同光学路径长度,从而考虑远程反射器207和209相对于彼此及相对于光源和接收器206的移动。例如,如果模式组合器211观察到的重合率移出精细调节范围之外,则处理器215可以引导调节器219调节一个或多个光学路径长度,使得路径长度差在精细调节范围内。
32.可以使用软件、固件、硬件或它们的适当组合来实现光源和接收器206中或本文所述的其他系统和方法中使用的处理器215和/或其他计算设备。处理器215和其他计算设备可以由特别设计的专用集成电路(asic)或现场可编程门阵列(fpga)补充或并入其中。处理器215和其他计算设备还可包括软件程序、固件或其他计算机可读指令或与它们一起运行,以执行在本文所述的方法和系统中使用的各种处理任务、计算和控制功能。
33.本文所述的方法可以通过由至少一个处理器(诸如处理器215)执行的计算机可执行指令(诸如程序模块或组件)来实现。通常,程序模块包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、数据组件、数据结构、算法等。
34.用于执行本文所述方法的操作中所用的其他数据的各种过程任务、计算和生成的指令可以在软件、固件或其他计算机可读指令中实现。这些指令通常存储在适当的计算机程序产品上,这些计算机程序产品包括用于存储计算机可读指令或数据结构的计算机可读介质。这样的计算机可读介质可以是可以由通用或专用计算机、处理器或其他可编程逻辑设备访问的可用介质。
35.合适的计算机可读存储介质可以包括例如非易失性存储器设备,包括半导体存储器设备,诸如随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程rom(eeprom)或闪存设备;磁盘,诸如内部硬盘和可移动磁盘;光盘存储设备,诸如光盘(cd)、数字通用光盘(dvd)、蓝光盘;或可以用于以计算机可以执行指令或数据结构的形式携带或存储所期望的程序代码的任何其他介质。
36.如上所述,光源和接收器206可能能够调节光子源201和与光子源所产生的孪生光子相关联的不同远程反射器207和209之间的不同路径长度,使得不同光学路径长度基本上足够相等以允许精细调节。另外,光源和接收器206可调节不同路径长度以考虑远程反射器207和209相对于光子源201的移动。因此,光源和接收器206可用于使与光子源201及远程反射器207和209相关联的不同卫星的操作以高精度同步。
37.图3示出了穿过芯片级设备300的光子的不同路径,这些路径均能够生成光子,将光子分离成孪生光子,向远程反射器提供孪生光子,从远程反射器接收光子,并且向干涉仪提供所接收的光子以便执行hom干涉测量法。因此,芯片级设备300示出了芯片级设备300的一个实施方案,该芯片级设备包含上文在图2中描述的光源和接收器206的某些部件。具体地,光子源201和图3中所示的其他部件促进光子向远程反射器207和209的发射和接收、所接收的光子向模式组合器211的递送、输出端口从模式组合器211到光检测器321和323的递送,以及电信号向定时模块311的递送。虽然这些部件被示出为芯片级设备的一部分,但这些部件同样可使用彼此用光传输介质耦合的单独部件来实现。
38.如图所示,图3示出了穿过芯片级设备300的源路径310和干涉仪路径312。在源路径310中,生成光子并且将光子分离成孪生光子303和305以供不同远程反射器使用。在干涉
仪路径312中,从远程反射器接收孪生光子303和305并且向定时模块311提供这些孪生光子。
39.在某些实施方案中,芯片级设备300利用简并自发参量下转换(dspdc)的非线性光学效应,其中泵浦光子308分离成几乎在相同时刻(例如,在彼此的《100飞秒以内)“诞生”的两个“孪生”光子306a和306b。可利用由量子力学执行的该同时性来使分开的原子钟同步。为了使分离的原子时钟同步(即,当不同的原子时钟位于不同卫星上或与其他类型的远程反射器相关联时),通过从芯片级设备300投影孪生光子303和305、从远程反射器中的每一个反射光子303和305中的一些、并且为它们提供在hong-ou-mandel(hom)干涉仪中的重组来实现同步,其中当路径基本上相等时,观察到重合率的纯量子机械干涉“凹陷”,如上文相对于图1-图2所述。使来自每个卫星的纠缠光子中的一些纠缠光子的到达时间在经典信道上关联,从而使时钟能够以高精度(即,潜在地以飞秒精度)同步。
40.在一些实施方案中,芯片级设备300是产生并干涉时间纠缠光子的芯片级光子集成电路。芯片级设备300可包括混合光波导平台上的光学功能和部件,该混合光波导平台将ppktp波导(或由具有类似特性的材料制成的其他波导)的非线性特性与氮化硅波导的高限制和滤波能力组合。
41.在另外的实施方案中,芯片级设备300可生成泵浦光子308。从泵浦光子308,芯片级设备300可经由提供光子的波导(诸如ppktp波导或由具有类似功能的材料制成的波导)中的连续波(cw)泵浦的ii型简并自发参量下转换(dspdc)来生成时间-能量纠缠孪生光子的高通量。孪生光子状态(也称为双光子状态或“2002”状态)可具有稳健时间-光谱纠缠并且是用于使远程卫星上的时钟之间的时间同步的理想量子系统,原因是其不易因吸收或损耗而退相干,并且传输信道(自由空间)天然没有色散。
42.在附加实施方案中,芯片级设备300可提供混合波导平台,该混合波导平台将提供光子的波导的非线性光学能力与光子部件波导的严密引导和滤波能力组合。该组合允许微型化、效率和稳健性,同时增加孪生光子306a和306b(从芯片级设备作为光子303和305发射)的可用通量。
43.在某些实施方案中,在源路径301中,经由提供光子的波导中的dspdc来形成孪生光子306a和306b。孪生光子306a和306b中的每个孪生光子可占用不同波导模式(横电的(te),或横磁的(tm))。垂直耦合器(vc)区域可绝热地从提供光子的波导取出双光子并放入在提供光子的波导的顶部上图案化的光子部件波导中。另外,tm和te光子可由两个衍射波导模式分离器(ms)分开。然后te光子可穿过带通滤波器(bpf)以排斥背景光子,穿过第二ms,随后作为孪生光子305离开该芯片。另外,初始tm光子由衍射模式转换器(mc)转换成te模式,该衍射模式转换器还使其传播方向反向。该(此时te偏振的)光子穿过bpf并且作为孪生光子303离开该芯片。该芯片上执行的各种功能可由光子部件波导(在一些实施方案中,由氮化硅或其他类似材料制成)执行,其中波导结构在包含提供光子的波导的衬底的顶部上沉积的膜中图案化。
44.在附加实施方案中,在干涉仪路径316中,孪生光子303和305可从远程反射器反射。孪生光子303和305可重新耦合到芯片级设备300上的光子部件波导中以便提供给hom干涉仪。(在一些具体实施中,这些光子还可具有由常规波片旋转90度的其偏振)。尽管孪生光子303和305重新进入先前发射它们的相同波导,但是由于它们的偏振此时已旋转,因此它
们耦合到正交波导模式(即,tm)中。然后孪生光子303和305中的每个孪生光子可与ms相互作用,该ms使它们在波导内的相应传播方向反向,从而使孪生光子303和305穿过相应ms的反射端口朝向50/50波导耦合器传递,重合孪生光子可在该50/50波导耦合器处重组。然后未能重组的光子可传出芯片级设备300以便由光检测器321和323进行检测并且由定时模块311执行后续干涉测量法。芯片级设备300及其中包含的部件在以下申请中更详细描述:2020年2月27日提交的名称为“集成光子源和纠缠光子的检测器(integrated photonics source and detector of entangled photons)”的美国非临时申请序列号16/803,841;2020年2月27日提交的名称为“集成光子模式分离器和转换器(integrated photonics mode splitter and converter)”的美国非临时申请序列号16/803,820;以及2020年2月27日提交的名称为“集成光子垂直耦合器(integrated photonics vertical coupler)”的美国非临时申请序列号16/803,831,所有这些美国非临时申请均以引用方式并入本文。
45.图4是示出可由光检测器421和423检测孪生光子403和405的各种组合440的示意图。一些系统可包括模式组合器433,该模式组合器将孪生光子403和405引导至两个光检测器421和423中的一者,诸如作为干涉仪的一部分发现的那些。在一些实施方案中,第一孪生光子403可被描述为信号光子403,并且第二孪生光子405可被描述为闲置光子405。如上所述,信号光子403可沿着第一光学路径投射,并且闲置光子405可沿着第二光学路径投射。第一光学路径可朝向第一远程反射器(诸如配备有回射光学器件的卫星)引导信号光子403,并且第二光学路径可朝向第二远程反射器引导闲置光子405。信号光子403和闲置光子405均向后朝向源反射并且耦合到模式组合器433(诸如上文描述为图2中的光源和接收器206的一部分的50/50模式组合器)中。如上所述,模式组合器433可具有被引导到两个光检测器421和423的两个输出端口。在一些具体实施中,光检测器421和423可为单光子雪崩光检测器;然而,可使用其他类型的光检测器。光检测器421和423可提供由时间差计数器(诸如可作为图2中的定时模块213的一部分找到)分析的电信号。
46.有时,信号光子403的第一光学路径可短于闲置光子405的第二光学路径。因此,信号光子403的飞行时间可短于闲置光子405的飞行时间。在其他时候,闲置光子405的第二光学路径可短于信号光子403的第一光学路径。因此,闲置光子405的飞行时间可短于信号光子403的飞行时间。当飞行时间更短时,相关联的光子可在另一光子入射在光检测器421和423中的一者上之前入射在光检测器421和423中的一者上。例如,当信号光子403的飞行时间短于闲置光子405的飞行时间时,信号光子403将在闲置光子入射在光检测器421和423中的一者上之前入射在光检测器421和423中的一者上。相反,当闲置光子405的飞行时间短于信号光子403的飞行时间时,闲置光子405将在信号光子403之前入射在光检测器421和423中的一者上。
47.当信号光子403入射在光检测器421和423中的一者上时,信号光子403可随机地入射在光检测器421和423中的一者上。类似地,当闲置光子405入射在光检测器421和423中的一者上时,闲置光子405可随机地入射在光检测器421和423中的一者上。因此,相关联的信号光子403和闲置光子405可以以组合440-a
–
440-d中的一者入射到光检测器421和423上。由于信号光子403和闲置光子405各自随机地入射在光检测器421和423上,因此组合440-a
–
440-d中的每个组合可基本上具有25%发生机会。
48.在组合440-a中,信号光子403和闲置光子405均穿过模式组合器433并且入射在不
同光检测器421和423上。具体地,信号光子403可穿过模式组合器433并且在第二光检测器检测时间入射到第二光检测器423上。闲置光子405可穿过模式组合器433并且在第一光检测器检测时间入射到第一光检测器421上。光检测器421和423可向定时模块提供其信号,其中这些信号包含描述第一光检测器检测时间和第二光检测器检测时间的信息。定时模块可计算等于第一光检测器检测时间减去第二光检测器时间的时间差。
49.在组合440-b中,信号光子403和闲置光子405均可由模式组合器433反射并且入射在不同光检测器421和423上。具体地,信号光子403可由模式组合器433反射并且在第一光检测器检测时间入射到第一光检测器421上。闲置光子405可由模式组合器433反射并且在第二光检测器检测时间入射到第二光检测器423上。光检测器421和423可向定时模块提供其信号,其中这些信号包含描述第一光检测器检测时间和第二光检测器检测时间的信息。定时模块可计算等于第一光检测器检测时间减去第二光检测器时间的时间差。
50.在组合440-c和440-d中,信号光子403和闲置光子405可入射在相同光检测器上。例如,在组合440-c中,信号光子403可穿过模式组合器433并且闲置光子405可由模式组合器433反射。因此,信号光子403和闲置光子405均入射在第二光检测器423上。另选地,在组合440-d中,信号光子403可由模式组合器433反射并且闲置光子405可穿过模式组合器433。因此,信号光子403和闲置光子405均入射在第一光检测器423上。当信号光子403和闲置光子405入射在相同光检测器上时,定时模块不会从第一光检测器421和第二光检测器423接收将由此推断相对定时信息的单独信号。
51.如上所述,当信号光子403和闲置光子405在不同时间到达时,组合440-a可致使定时模块测量闲置光子405的到达时间减去信号光子403的到达时间。另外,组合440-b可致使定时模块测量信号光子403的到达时间减去闲置光子405的到达时间。定时模块可不从组合440-c和440-d获取信息。因此,定时模块的测量值可产生大小基本上相等但符号相反的两个结果集群,其中这些测量值的大小与这些路径之间的光学长度的差值成比例。
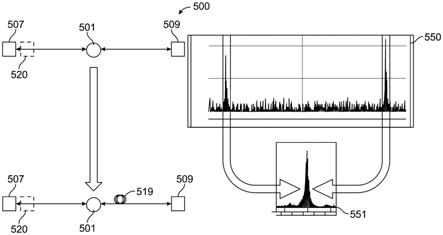
52.图5是用于基于来自定时模块的测量值来调节路径长度的系统500的框图。如上所述,定时模块可产生在不同光检测器处测量的孪生光子的时间差的测量值的两个结果集群。定时模块可向处理器提供测量值的结果,该处理器可执行所记录的时间差的统计分析。图表550是定时模块所测量的时间差的直方图。图表550示出了基本上关于孪生光子的同时到达时间对称的两个测量值集群。处理器可执行双峰拟合或其他数学过程以从直方图提取时延。处理器可使用所提取的信息来实现一个或多个调节以去除孪生光子的不同光学路径之间的时延,使得定时模块所测量的时间差的结果的直方图在孪生光子的同时到达时间具有单个集群,如图表551中所示。
53.在某些实施方案中,为了实现调节,系统500包括向远程反射器507和509提供孪生光子的光子源501。具体地,光子源501可向远程反射器507提供第一光子,并且向远程反射器509提供第二光子。如图所示,光子源501与远程反射器507之间的第一光子的光学路径上可存在某个未知路径长度差520。由于路径长度差520,光子源上的定时模块可测量第一光子和第二光子入射到光子源上的光检测器上的时间的差值。因此,处理器可观察到基本上关于同时到达时间对称的两个测量值集群。然后处理器可从定时模块所提供的测量值提取时延。例如,测量值集群之间的宽度可等于由路径长度差520得出的延迟的两倍。然后处理器可将延迟519添加到光学路径中的较短者,使得光子源501与远程反射器507和509之间的
不同光学路径基本上相等。在一些实施方案中,当添加的延迟519之后的路径长度差在由调节器219执行的调节的精细调节范围内时,这些路径基本上相等。
54.在一些实施方案中,处理器可能能够由定时模块所提供的信息来计算延迟的大小,但不能够计算延迟的符号。为了确定延迟的符号(应通过插入添加的延迟519来延迟哪个光学路径),处理器可将附加延迟添加到光子源501与两个远程反射器507和509之间的两个光学路径中的一者。在将附加延迟519添加到这些路径中的一者之后,处理器可再次确定定时模块是否测量入射时间的差值。如果定时模块所提供的测量值产生由在添加延迟519之前存在于光学路径中的初始延迟的两倍分开的两个测量值集群,则处理器可确定延迟519添加到了错误光学路径。因此,处理器随后可去除延迟519并且将延迟519插入到另一光学路径,使得定时模块所测量的时间差的结果的直方图在孪生光子的同时到达时间具有单个集群,如图表551中所示。另选地,如果定时模块所提供的测量值在同时到达时间产生单个测量值集群,则处理器可确定延迟519添加到了正确光学路径。
55.在另外的实施方案中,延迟519可作为一系列离散光学路径长度来添加。例如,系统500可能能够将大延迟519插入到这些光学路径中的一者或两者中。延迟519可使用各种长度的离散光学延迟元件来插入。例如,延迟元件519可为光纤、反射镜或其他光学设备的任何组合。另外,延迟元件519可包括具有100m、10m、1m、1cm等长度的可插入光纤区段。另外,延迟元件519可包括可调反射镜,这些可调反射镜可使光在反射镜之间反射期望的次数以延迟其间的光传播,如由反射镜的角度所确定,其中反射镜相对于彼此的角度由处理器控制。其他延迟元件可用于控制延迟519的长度,诸如压电换能器、可调棱镜等。因此,使用各种延迟长度,处理器可移除多个光学路径之间的路径长度差,使得路径长度差在精细调节范围内。
56.在某些实施方案中,当光子源501相对于远程反射器507和509中的一者或两者移动时,处理器可对延迟519进行调节以保持光学路径长度基本上相等。例如,如果处理器确定存在超过一个测量值集群,则处理器可调节延迟519的长度。另选地,当处理器确定光学路径长度差大于精细调节范围时,处理器可调节延迟519。
57.图6是光学设备的网络600的框图,这些光学设备实现上述系统和方法以使网络600中的多个系统同步。如图所示,网络600可包括第一光源601。在某些实施方案中,第一光源601充当使网络600的各种节点的同步初始化的光源。因此,第一光源601用作网络中唯一充当纠缠光子对的源并且不唯一充当反射光子的终点的节点。在其他实施方案中,第一光源601同时充当纠缠光子对的源和反射光子对的终点。因此,第一光源601充当多功能节点601,其同时充当纠缠光子的终点和源。另外,网络600可包括以与上述远程反射器类似的方式发挥功能的终点节点607和609。此外,网络600可包括同时充当纠缠光子对的终点和源的多功能节点608-a
–
608-d(总体地和共同地称为多功能节点608)。
58.在某些实施方案中,为了开始同步,用作第一多功能节点601的第一光源601可使第一多功能节点601和终点节点609之间的光学路径610-a与第一多功能节点601和多功能节点608-a之间的光学路径610-b同步。第一多功能节点601可使用上述粗略调节和精细调节的组合来使光学路径610-a与610-b同步。当光学路径610-a与光学路径610-b同步时,则多功能节点608-a可充当光源,其使用多功能节点608-b和第一多功能节点601作为反射器以使光学路径610-c基本上与光学路径610-b同步,如上所述。类似地,多功能节点608-b使
光学路径610-d与光学路径610-c同步,多功能节点608-c使光学路径610-e与光学路径610-d同步,并且多功能节点608-d使光学路径610-f与光学路径610-e同步。
59.图7为用于直接测量光源和远程反射器之间的光学路径长度差的方法700的流程图。例如,方法700在701处进行,其中生成多对同时产生的光子。另外,方法700在703处进行,其中沿着第一光学路径朝向第一远程反射器发射一对光子中的第一光子,并且沿着第二光学路径朝向第二远程反射器发射该对光子中的第二光子。另外,方法700在705处进行,其中接收第一光子和第二光子。另外,方法700在707处进行,其中将所接收的第一光子和所接收的第二光子在具有第一输出端口和第二输出端口的模式组合器中组合。
60.在另外的实施方案中,方法700在709处进行,其中在第一光检测器处检测来自第一输出端口的第一输出,并且在第二光检测器处检测来自第二输出端口的第二输出。另外,方法700在711处进行,其中基于对第一输出和第二输出的检测之间的时间差来测量第一光学路径和第二光学路径之间的光学路径长度差。另外,方法700可在713处进行,其中可调节第一光学路径和第二光学路径中的一者或多者的长度以减小光学路径长度差。
61.示例性实施方案
62.实施例1包括一种系统,所述系统包括:光源,所述光源用于生成一对同时产生的光子;第一发射器/接收器,所述第一发射器/接收器朝向第一远程反射器发射所述一对光子中的第一光子,并且沿着第一光学路径接收所述反射的第一光子;第二发射器/接收器,所述第二发射器/接收器朝向第二远程反射器发射所述一对光子中的第二光子,并且沿着第二光学路径接收所述反射的第二光子;模式组合器,该模式组合器用于将反射的第一光子和反射的第二光子组合到第一输出端口和第二输出端口中;多个光检测器,该多个光检测器检测来自第一输出端口的光子和来自第二输出端口的光子;以及处理器,所述处理器执行可执行代码,所述可执行代码使得所述处理器基于来自所述多个光检测器的信号的到达时间差来测量所述第一光学路径和所述第二光学路径之间的时延差。
63.实施例2包括根据实施例1所述的系统,其中所述可执行代码指示所述处理器向致动器发送命令,所述命令使得所述致动器对所述第一光学路径和所述第二光学路径中的一者或多者的长度进行调节以减小所述时延差。
64.实施例3包括根据实施例2所述的系统,其中所述时延差减小,使得所述差值在精细调节范围内。
65.实施例4包括根据实施例2-3中任一项所述的系统,其中对所述长度的所述调节基本上等于与所测量的时延差相关联的长度。
66.实施例5包括根据实施例2-4中任一项所述的系统,其中所述可执行代码指示所述处理器:命令所述致动器将一定长度的光传输介质插入所述第一光学路径中,其中所述光传输介质的所述长度基本上等于与所测量的时延差相关联的长度;在所述一定长度的光传输介质被插入所述第一光学路径中之后,测量所述第一光学路径和所述第二光学路径的改变的时延差;确定所述改变的时延差是否大于所测量的时延差;以及当所述改变的时延差大于所测量的时延差时,命令所述致动器从所述第一光学路径移除所述一定长度的光传输介质,并且将所述一定长度的光传输介质插入所述第二光学路径中。
67.实施例6包括根据实施例5所述的系统,其中所述光传输介质包括以下中的至少一者:一定长度的光纤;多个反射镜;和机械延迟级。
68.实施例7包括根据实施例5-6中任一项所述的系统,其中所述光传输介质包括不同可组合长度的光传输介质的组合。
69.实施例8包括根据实施例1-7中任一项所述的系统,其中所述处理器通过以下方式测量所述时延差:构造当该对光子中的光子入射在该多个光检测器中的第一光检测器上时以及当该光子入射在该多个光检测器中的第二光检测器上时之间的时间差的直方图;以及将时延测量为直方图中的第一峰值与第二峰值之间的时间差。
70.实施例9包括根据实施例8所述的系统,其中使用双峰拟合来计算所述第一峰和所述第二峰之间的时间差。
71.实施例10包括一种方法,所述方法包括:生成多对同时产生的光子;朝向第一远程反射器发射所述多对同时产生的光子中的一对光子中的第一光子,并且朝向第二远程反射器发射所述一对光子中的第二光子;接收所述第一光子和所述第二光子,其中所述第一光子和所述第二光子分别沿着第一光学路径和第二光学路径行进;将所接收的第一光子和所接收的第二光子在具有第一输出端口和第二输出端口的模式组合器中组合;在第一光检测器处检测来自第一输出端口的第一输出,并且在第二光检测器处检测来自第二输出端口的第二输出;以及基于由所述第一光检测器以及由所述第二光检测器对所述第一输出和所述第二输出的所述检测之间的时间差来测量所述第一光学路径和所述第二光学路径之间的光学路径长度差。
72.实施例11包括根据实施例10所述的方法,还包括调节所述第一光学路径和所述第二光学路径中的一者或多者的长度以减小所述光学路径长度差。
73.实施例12包括根据实施例11所述的方法,其中调节所述长度包括将所述光学路径长度差减小到精细调节范围内。
74.实施例13包括根据实施例11-12中任一项所述的方法,其中调节所述长度包括将所述光学路径长度差减小离散距离,所述离散距离接近所测量的光学路径长度差。
75.实施例14包括根据实施例11-13中任一项所述的方法,其中调节所述长度还包括:将一定长度的光传输介质插入所述第一光学路径中;在所述一定长度的光传输介质被插入所述第一光学路径中之后,测量所述第一光学路径和所述第二光学路径之间的改变的光学路径长度差;确定所述改变的光学路径长度差是否大于所测量的光学路径长度差;以及当所述改变的光学路径长度差大于所测量的光学路径长度差时,从所述第一光学路径移除所述一定长度的光传输介质,并且将所述一定长度的光传输介质插入所述第二光学路径中。
76.实施例15包括根据实施例14所述的方法,其中所述光传输介质包括以下中的至少一者:一定长度的光纤;多个反射镜;和机械延迟级。
77.实施例16包括根据实施例14-15中任一项所述的方法,其中所述光传输介质包括不同可组合长度的光传输介质的组合。
78.实施例17包括根据实施例10-16中任一项所述的方法,还包括:构建所述第一输出和所述第二输出的检测的时间差的直方图;以及测量所述直方图中的第一峰值与第二峰值之间的时间差;以及识别与所述时间差相关联的长度。
79.实施例18包括根据实施例17所述的方法,其中测量所述第一峰和所述第二峰之间的时间差包括使用双峰拟合。
80.实施例19包括一种系统,所述系统包括:光源,所述光源用于生成多对同时产生的
光子;第一发射器/接收器,所述第一发射器/接收器朝向第一远程反射器发射所述多对同时产生的光子中的第一光子,并且沿着第一光学路径接收所述反射的第一光子;第二发射器/接收器,所述第二发射器/接收器朝向第二远程反射器发射所述多对同时产生的光子中的第二光子,并且沿着第二光学路径接收所述反射的第二光子;模式组合器,所述模式组合器组合来自所述第一光学路径的所述反射的第一光子和来自所述第二光学路径的所述反射的第二光子;多个光检测器,所述多个光检测器检测来自所述模式组合器的第一输出端口的第一输出和来自所述模式组合器的第二输出端口的第二输出;致动器,所述致动器用于控制所述第一光学路径和所述第二光学路径的长度;以及处理器,所述处理器执行可执行代码,所述可执行代码使得所述处理器:基于所述多对同时产生的光子中的相关联的光子入射在所述多个光检测器中的不同光检测器上时之间的时间差来测量所述第一光学路径和所述第二光学路径之间的光学路径长度差;以及向所述致动器发送命令,所述命令使得所述致动器对所述第一光学路径和所述第二光学路径中的一者或多者的长度进行调节以减小所述光学路径长度差。
81.实施例20包括根据实施例19所述的系统,其中所述处理器通过以下方式测量所述长度差:构造当所述多对同时产生的光子中的光子入射在所述多个光检测器中的第一光检测器上时以及当所述相关联的光子入射在所述多个光检测器中的第二光检测器上时之间的时间差的直方图;以及测量所述直方图中的第一峰值与第二峰值之间的时间差;以及识别与所述时间差相关联的长度。
82.尽管本文已说明和描述了特定实施方案,但本领域的普通技术人员将认识到,经计算以实现相同目的的任何布置可替代所展示的特定实施方案。因此,显而易见的是,本发明仅受权利要求书以及其等同物所限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1