智能搬运车以及智能物料储存管理系统的制作方法
1.本发明有关于一种智能搬运车以及智能物料储存管理系统,尤指一种搭配智能标签的智能搬运车以及智能物料储存管理系统。
背景技术:
2.智能搬运车(automated guided vehicle,agv),指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种搬运功能的运输车。在工业自动化的发展下,智能搬运车的需求越来越高。然而,在实际应用上,由于每个生产单位的产线物料的回温时间和使用时间都不相同,必须妥善控管物料各阶段滞留及使用的时间。
技术实现要素:
3.有鉴于此,在本发明一实施例中,提供一种搭配智能标签的智能搬运车以及智能物料储存管理系统,能夠依照不同物料和製程的需求控管物料在各生产单位滞留及使用的时间。
4.本发明一实施例揭露一种智能搬运车,适用于产线。智能搬运车包括车体、传动装置、输送系统、第一侦测装置、标签安装装置、控制单元以及标签读取器。车体具有进料口,输送系统安装于所述车体,所述输送系统具有输送带,用以从所述进料口接收并传送物料经由第一既定区域、第二既定区域至第三既定区域。第一侦测装置用以侦测所述物料的位置,当所述物料位于所述第一既定区域时,输出一第一控制信号。标签安装装置根据所述第一控制信号安装智能标签于所述物料,并启动所述智能标签。控制单元根据移动指令控制所述传动装置以移动所述车体,对启动的所述智能标签写入物料讯息以及设定既定时间,所述智能标签开始计数一经过时间,且所述输送带将所述物料由所述第一既定区域传送至所述第二既定区域。标签读取器用以读取所述智能标签的所述物料讯息、所述经过时间以及所述既定时间,当所述经过时间与所述既定时间相符时,所述标签读取器输出第二控制信号,所述输送系统根据所述第二控制信号将所述物料由所述第二既定区域传送至所述第三既定区域。
5.本发明一实施例揭露一种智能物料储存管理系统,包括智能搬运车、多个生产单位以及轨道。智能搬运车包括车体、传动装置、输送系统、第一侦测装置、标签安装装置、控制单元以及标签读取器。车体具有进料口,输送系统安装于所述车体,所述输送系统具有输送带,用以从所述进料口接收并传送物料经由第一既定区域、第二既定区域至第三既定区域。第一侦测装置用以侦测所述物料的位置,当所述物料位于所述第一既定区域时,输出一第一控制信号。标签安装装置根据所述第一控制信号安装智能标签于所述物料,并启动所述智能标签。控制单元根据移动指令控制所述传动装置以移动所述车体,对启动的所述智能标签写入物料讯息以及设定既定时间,所述智能标签开始计数一经过时间,且所述输送带将所述物料由所述第一既定区域传送至所述第二既定区域。标签读取器用以读取所述智能标签的所述物料讯息、所述经过时间以及所述既定时间,当所述经过时间与所述既定时
间相符时,所述标签读取器输出第二控制信号,所述输送系统根据所述第二控制信号将所述物料由所述第二既定区域传送至所述第三既定区域。轨道经过所述生产单位,所述控制单元根据所述移动指令控制所述传动装置以使得所述智能搬运车沿着所述轨道移动,其中移动指令是由一远端装置所提供。
6.根据本发明一实施例,所述智能搬运车更包括一第二侦测装置,用以侦测所述物料的位置,当所述物料位于所述第二既定区域时,输出一第三控制信号。
7.根据本发明一实施例,所述输送系统更包括一滑轨,所述滑轨上具有一卡榫,位于所述第二既定区域,所述控制单元根据所述第三控制信号使所述卡榫上锁以阻挡所述物料于所述滑轨移动,并根据所述第二控制信号使所述卡榫解锁以使得所述物料由所述第二既定区域移动至所述第三既定区域。
8.根据本发明一实施例,所述智能搬运车更包括一第三侦测装置,位于所述输送带,用以侦测所述物料的位置,当所述物料放置于所述输送带时,输出一第四控制信号,所述控制单元根据所述第四控制信号使所述输送带传送所述物料。
9.根据本发明一实施例,所述标签安装装置根据所述第一控制信号将所述智能标签贴附于所述物料,并按压所述智能标签的开关以启动所述智能标签。
10.根据本发明一实施例,所述智能搬运车更包括一天线模块,用以接收上述移动指令。
11.根据本发明一实施例,所述智能标签更包括一第四侦测装置,用以侦测所述物料的环境数据,当所述物料的所述环境数据出现异常时,输出一第五控制信号以通知所述控制单元,所述控制单元根据所述第五控制信号,透过所述天线模块传送所述环境数据至一后台装置。
12.根据本发明实施例所述的智能搬运车,能够在各生产单位移动以达到运送物料的目的外,透过导入智能标签以及标签安装与读写系统,可以管控物料在不同阶段停留以及使用的时间。并且,透过标签安装系统取代人工方式安装智能标签,能够节省时间并大幅提高产线自动化的程度。另外,根据本发明实施例所述的智能物料储存管理系统在智能搬运车以及智能标签还配备环境侦测传感器,可即時準確的監控物料環境是否異常,确保产品的良率以及提高产线的安全性。
附图说明
13.图1显示根据本发明一实施例所述的智能物料储存管理系统的示意圖。
14.图2显示根据本发明一实施例所述的智能搬运车的外观示意圖。
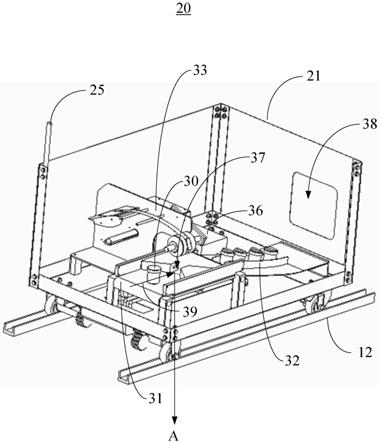
15.图3显示根据本发明一实施例所述的智能搬运车的侧视圖。
16.图4显示根据本发明一实施例所述的智能搬运车的外观图。
17.主要元件符号说明
18.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
智能物料储存管理系统
19.10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
生产单位
20.12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轨道
21.14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
物料仓
22.20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
智能搬运车
23.16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
充电区域
24.21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车体
25.23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
进料口
26.25
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
天线模块
27.27
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传动装置
28.29
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滚轮
29.30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
物料
30.31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
输送带
31.32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑轨
32.33
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
标签安装装置
33.34
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
标签读取器
34.35、37
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器
35.36
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元。
36.38
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
取料口
37.39
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移动方向
38.40
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
智能标签
39.a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一既定区域
40.b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二既定区域
41.c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三既定区域
42.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
43.为了便于本领域普通技术人员理解和实施本发明,下面结合附图与实施例对本发明进一步的详细描述,应当理解,本发明提供许多可供应用的发明概念,其可以多种特定型式实施。本领域技术人员可利用这些实施例或其他实施例所描述的细节及其他可以利用的结构,逻辑和电性变化,在没有离开本发明的精神与范围之下以实施发明。
44.本发明说明书提供不同的实施例来说明本发明不同实施方式的技术特征。其中,实施例中的各元件的配置为说明之用,并非用以限制本发明。且实施例中图式标号的部分重复,是为了简化说明,并非意指不同实施例之间的关联性。其中,图示和说明书中使用的相同的元件编号表示相同或类似的元件。本说明书的图示为简化的形式且并未以精确比例绘制。事實上,各種特徵的尺寸可任意放大或縮小以便清楚說明。为清楚和方便说明起见,方向性用语(例如顶、底、上、下以及对角)是针对伴随的图示说明。而以下说明所使用的方向性用语在没有明确使用在以下所附的申请专利范围时,并非用来限制本发明的范围。
45.再者,在说明本发明一些实施例中,说明书以特定步骤顺序说明本发明的方法以及(或)程序。然而,由于方法以及程序并未必然根据所述的特定步骤顺序实施,因此并未受限于所述的特定步骤顺序。熟习此项技艺者可知其他顺序也为可能的实施方式。因此,于说明书所述的特定步骤顺序并未用来限定申请专利范围。再者,本发明针对方法以及(或)程序的申请专利范围并未受限于其撰写的执行步骤顺序,且熟习此项技艺者可了解调整执行步骤顺序并未跳脱本发明的精神以及范围。
46.根據以下詳細說明,並配合所附圖式,可更加瞭解本发明。
47.图1显示根据本发明一实施例所述的智能物料储存管理系统的示意圖。根据本发明一实施例所述的智能物料储存管理系统100,包括多个生产单位10、轨道12、物料仓14以及沿着轨道12在多个生产单位10间来回移动的智能搬运车20。智能搬运车20可根据作业目的由物料仓14取得物料,并将物料送至需要的生产单位10,也可将各生产单位10的成品或半成品运送至物料仓14存放。在图1中,所显示的两个生产单位10仅为示例,事实上,本发明实施例所述的智能物料储存管理系统可根据实际需要而应用在其他个数的生产单位。
48.根据本发明另一实施例所述的智能搬运车20,还包括电池模块(图未显示),设置智能搬运车20的底盘位置,而轨道12经过一充电区域16,在充电区域16中,具有充电模块,当智能搬运车20停留或途经充电区域16时,充电模块可透过有线或无线的方式对智能搬运车20的电池模块充电。必须说明的是,在图1显示的实施例是智能搬运车20沿着轨道12移动,在其他实施例中,本发明一实施例所述的智能搬运车20也能在无轨道的环境中,在多个生产单位10以及物料仓14间移动。另外,图1中所示的充电区域16的位置与个数仅为示例,本领域技术人员可根据实际需要在产线的特定区域设置一个或多个充电区域16。
49.图2显示根据本发明一实施例所述的智能搬运车的外观示意圖。如图2所示,根据本发明一实施例所述的智能搬运车20包括车体21、进料口23、天线模块25以及传动装置27。车体21上具有进料口23,透过进料口23可将物料放进智能搬运车20内。根据本发明实施例,可透过人工或工业机器人经由进料口23将物料放进智能搬运车20内。天线模块25用以接收移动指令。所述移动指令可由外部提供,例如透过使用者以终端装置发出移动指令,或由控制中心根据设定发出移动指令。根据本发明一实施例,终端装置可以是用户终端(user terminal)、用户设备(user equipment,ue)、终端(terminal)、无线通信设备、用户代理或用户装置。终端设备还可以是蜂窝电话、无线电话、会话启动协议(session initiation protocol,sip)电话、无线本地环路(wireless local loop,wll)站、个人数字助理(personal digital assistant,pda)、具有无线通信功能的手持设备、计算设备或连接到无线调制解调器的其它处理设备、车载设备、可穿戴设备(如智能手表)、膝上型计算机(laptop)、台式计算机等。根据本发明一实施例所述的智能搬运车20还包括传动装置27,例如传动电机,用以驱动滚轮29以使得智能搬运车20于轨道12上移动。天线模块25可包括移动通信模块与无线通信模块。移动通信模块可以提供用来与终端设备联系的包括2g/3g/4g/5g等无线通信的解决方案。移动通信模块可以由天线25接收电磁波,并对接收的电磁波进行滤波,放大等处理,传送至调制解调处理器进行解调。移动通信模块还可以对经调制解调处理器调制后的信号放大,经天线25转为电磁波辐射出去。无线通信模块可以提供用来与终端设备联系的包括无线局域网(wireless local area networks,wlan)、无线保真网络(wireless fidelity,wifi)、蓝牙(bluetooth,bt),全球导航卫星系统(global navigation satellite system,gnss),调频(frequency modulation,fm),近距离无线通信技术(near field communication,nfc),红外技术(infrared,ir)等无线通信的解决方案。另外,根据本发明一实施例所述的智能搬运车20可以应用于长期演进系统的车联网(long term evolution vehicle-to-everything,lte-v2x)中、新无线系统的车联网(new radiovehicle-to-everything,nr-v2x)中、未来的第五代系统的车联网(5th generationvehicle-to-everything,5g-v2x)中,或者未来的通信系统的车联网中,如第六
代移动通信系统的车联网中。即上述的v2x射频信号可以理解为lte-v2x射频信号或者nr-v2x射频信号。
50.根据本发明一实施例所述的智能搬运车20还具有多种传感器,包括温度传感器、湿度传感器、气压传感器、气味传感器、环境光传感器等,用以侦测智能搬运车20周围的环境资讯,另外还包括陀螺仪传感器、磁传感器、加速度传感器、距离传感器、接近光传感器等,用以侦测智能搬运车20本身的状态以及与外部环境的互动,以及压力传感器、指纹传感器、触摸传感器等,用来侦测使用者对智能搬运车20的控制指令。另外,根据本发明一实施例所述的智能搬运车20还具有位置传感器以及重量传感器,用以侦测智能搬运车20所承载物料的状态。必须说明的是,以上所列举的传感器类型仅为示例,本领域技术人员可根据实际需要而配置其功能的传感器。
51.图3显示根据本发明一实施例所述的智能搬运车的侧视圖,图4显示根据本发明一实施例所述的智能搬运车的外观图。在图3与图4中,为了方便说明,部份车体21将以透明方式表示,以显示智能搬运车20内部的结构。如图3与图4所示,根据本发明一实施例所述的智能搬运车20具有输送带31、滑轨32、标签安装装置33、标签读取器34以及控制单元36。
52.控制单元36可以包括一个或多个处理单元,例如包括应用处理器(application processor,ap),调制解调处理器,图形处理器(graphics processing unit,gpu),图像信号处理器(image signal processor,isp),控制器,视频编解码器,数字信号处理器(digital signal processor,dsp),基带处理器,或神经网络处理器(neural-network processing unit,npu)等。其中,不同的处理单元可以是独立的部件,也可以集成在一个或多个处理器中。控制单元36可以根据指令操作码和时序信号,产生操作控制信号,完成取指令和执行指令的控制。在其他一些实施例中,控制单元36中还可以设置存储器,用于存储指令和数据。例如,控制单元36中的存储器可以为高速缓冲存储器。该存储器可以保存控制单元36刚用过或循环使用的指令或数据。如果控制单元36需要再次使用该指令或数据,可从所述存储器中直接调用。
53.输送带31,安装于车体21,下方具有传感器35(第三侦测装置),传感器35可为重量传感器,用以侦测物料30是否已出现在输送带31上,当传感器35测得输送带31上的物件重量超过一既定值时(例如100克),代表物料30已由进料口23放置在输送带31,此时传感器35(第三侦测装置)输出一第四控制信号至控制单元36,而控制单元36根据第四控制信号使输送带31开始运转以传送物料30,并将物料30沿着移动方向39传送至第一既定区域a。
54.参阅图4,传感器37(第一侦测装置)位于第一既定区域a,用以侦测物料30的位置,当物料被输送带31带动至第一既定区域a时,传感器37输出第一控制信号至控制单元36,而控制单元36根据第一控制信号以驱动标签安装装置33。根据本发明一实施例,传感器37可为接近传感器、红外线传感器或光遮断传感器。
55.参阅图3,标签安装装置33驱动后,即下压以将智能标签40贴附于物料30上。如图3所示,物料30在经过标签安装装置33前尚未被安置智能标签40,经过标签安装装置33处理后,在滑轨32上的物料30上已经配置有智能标签40。根据本发明一实施例,智能标签40具有通讯芯片、传感器以及启动开关。标签安装装置33在安装智能标签40至物料30上时,同时按压启动开关以启动智能标签40,使得智能标签40进入可读写的状态。接下来,控制单元36透过标签写入工具(图未显示)将物料讯息及对应的预设既定时间写入智能标签40,然后智能
标签40被输送带31继续带动至第二既定区域b,在此同时,智能标签40开始计数一经过时间。第二既定区域b位于滑轨32处,滑轨32于第二既定区域b设有传感器(第二侦测装置,图未显示),用以侦测物料30的位置,当侦测到物料30位于第二既定区域时,传感器(第二侦测装置)输出一第三控制信号至控制单元36。根据本发明一实施例,位于第二既定区域b的传感器(第二侦测装置)可为接近传感器、红外线传感器或光遮断传感器。
56.滑轨32上具有一卡榫(图未显示),位于第二既定区域b,预设的状态是收合于滑轨32的滑面下。当控制单元36接收到第三控制信号时,控制单元36根据第三控制信号使卡榫上锁以阻挡物料30于滑轨32移动。卡榫阻挡物料30于滑轨32移动的方式可透过突出于滑轨32的滑面以挡住物料30,使得物料30无法下滑。必须说明的是,本实施例使用卡榫仅为一例子,本领域技术人员可使用其它方式使物料30停留在滑轨32的第二既定区域b。
57.物料30停留在滑轨32的第二既定区域b时,标签读取器34读取智能标签40的物料讯息、经过时间以及既定时间。由于智能标签40持续累加计数经过时间,当经过时间与既定时间相符时,标签读取器34输出一第二控制信号至控制单元36。当控制单元36接收到第二控制信号时,控制单元36根据第二控制信号控制卡榫解锁,使卡榫收合于滑轨32的滑面下,使得物料30由滑轨32的第二既定区域b下滑至第三既定区域c。第三既定区域c为物料暂存区,物料30停留于此时,透过进料口23可将物料放进智能搬运车20内。根据本发明实施例,可透过人工或工业机器人经由取料口38将物料30由智能搬运车20取出。
58.根据本发明实施例,智能标签40上还可具有环境侦测传感器,包括温度传感器、湿度传感器、气压传感器、气味传感器、环境光传感器等,用以侦测智能标签40所处位置的环境资讯。透过智能搬运车20以及智能标签40的环境侦测传感器,可以搜集产线上的环境相关资讯,当产线上的环境相关资讯的异常状态超过一临界值时,这些传感器将异常信息提供至控制单元36,再由控制单元36透过天线25传送至后台管理装置或者云端伺服器作数据管理。必须说明的是,本发明实施例中所述的标签安装装置33、标签写入工具、标签读取器34以及智能标签40的详细结构与内部电路为本领域的普通技术人员所公知的常规元件,因此不予赘述以精简说明。
59.根据本发明实施例所述的智能搬运车,能够在各生产单位移动以达到运送物料的目的外,透过导入智能标签以及标签安装与读写系统,可以管控物料在不同阶段停留以及使用的时间。并且,透过标签安装系统取代人工方式安装智能标签,能够节省时间并大幅提高产线自动化的程度。另外,根据本发明实施例所述的智能物料储存管理系统在智能搬运车以及智能标签还配备环境侦测传感器,可即時準確的監控物料環境是否異常,确保产品的良率以及提高产线的安全性。
60.对本领域的普通技术人员来说,可以根据本发明的发明方案和发明构思结合生成的实际需要做出其他相应的改变或调整,而这些改变和调整都应属于本发明权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1