紧急车辆行驶系统、服务器装置以及记录介质的制作方法
[0001]
在此探讨的实施方式涉及一种紧急车辆行驶系统、服务器装置以及紧急车辆行驶程序。
[0002]
在专利文献1(日本特开2018-151208号公报)中公开了一种自动驾驶辅助装置,该自动驾驶辅助装置在车辆的自动驾驶行驶时,当通过紧急车辆检测部而检测出紧急车辆向本车辆的接近时,根据驾驶员的状态,而使本车辆的行驶路线变更为与紧急车辆的行驶路线不重复的行驶路线。
[0003]
在专利文献1(日本特开2018-151208号公报)所记载的自动驾驶辅助装置中,仅考虑了使通过自动驾驶而行驶的车辆避让紧急车辆的情况。也就是说,未考虑紧急车辆的周围的手动驾驶的车辆是否会避让紧急车辆的情况,从而在使紧急车辆顺利地行驶的这一点上,仍存在改善的余地。
技术实现要素:
[0004]
本公开是鉴于上述的问题点而完成的发明,其目的在于,提供一种无论何种驾驶模式均能够使紧急车辆的周围的车辆顺利地避让紧急车辆的紧急车辆行驶系统、服务器装置以及紧急车辆行驶程序。
[0005]
本公开的第一方式所涉及的紧急车辆行驶系统具有:取得部,其取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息;切换部,其基于由所述取得部所取得的行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开所述第一车辆那样的自动驾驶状态。
[0006]
在第一方式所涉及的紧急车辆行驶系统中,通过取得部而取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息。作为与第一车辆的行驶状态相关的行驶信息,例如,取得了第一车辆的行驶路径、行驶速度以及目的地等。而且,通过切换部,并基于由取得部所取得的行驶信息,从而将存在于距第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开第一车辆那样的自动驾驶状态。由此,第二车辆通过如避开第一车辆那样的自动驾驶而进行行驶。因此,能够使作为紧急车辆的第一车辆的周围的手动驾驶状态或远程驾驶状态的第二车辆顺利地避让第一车辆。
[0007]
本公开的第二方式所涉及的紧急车辆行驶系统具有:取得部,其取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息;切换部,其基于由所述取得部所取得的行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或自动驾驶状态的第二车辆切换为如避开所述第一车辆那样的远程驾驶状态。
[0008]
在第二方式所涉及的紧急车辆行驶系统中,通过取得部而取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息。作为与第一车辆的行驶状态相关的行驶信息,例如,取得了第一车辆的行驶路径、行驶速度以及目的地等。而且,通过切换部,并基于由取得部所取得的行驶信息,从而将存在于距第一车辆预定的范围内的手动驾驶状态或自动驾驶状态的第二车辆切换为如避开第一车辆那样的远程驾驶状态。由此,第二车辆通过如避开第
一车辆那样的远程驾驶而进行行驶。因此,能够使作为紧急车辆的第一车辆的周围的手动驾驶状态或自动驾驶状态的第二车辆顺利地避让第一车辆。
[0009]
第三方式所涉及的紧急车辆行驶系统为,在第一方式所述的紧急车辆行驶系统中,所述切换部被设置于所述第二车辆或服务器装置上。
[0010]
在第三方式所涉及的紧急车辆行驶系统中,切换部被设置于第二车辆或服务器装置上。由此,通过被设置于第二车辆或服务器装置上的切换部,并基于由取得部所取得的行驶信息,从而将第二车辆切换为如避开第一车辆那样的自动驾驶状态。
[0011]
第四方式所涉及的紧急车辆行驶系统为,在第二方式所述的紧急车辆行驶系统中,所述切换部被设置于实施所述第二车辆的远程驾驶的远程中心中。
[0012]
在第四方式所涉及的紧急车辆行驶系统中,切换部被设置于实施第二车辆的远程驾驶的远程中心中。由此,通过被设置于远程中心中的切换部,并基于由取得部所取得的行驶信息,从而能够使第二车辆切换为如避开第一车辆那样的远程驾驶状态。
[0013]
第五方式所涉及的紧急车辆行驶系统为,在第一方式至第四方式中的任意一个方式所述的紧急车辆行驶系统中,所述取得部被设置于所述第一车辆所行驶的道路上。
[0014]
在第五方式所涉及的紧急车辆行驶系统中,取得部被设置于作为紧急车辆的第一车辆所行驶的道路上。由此,取得部例如通过与第一车辆的通信、或者对第一车辆进行拍摄的拍摄部等,而取得与第一车辆的行驶状态相关的行驶信息。
[0015]
第六方式所涉及的紧急车辆行驶系统为,在第一方式至第四方式中的任意一个方式所述的紧急车辆行驶系统中,所述取得部被设置于所述第二车辆上,并通过所述第一车辆与所述第二车辆之间的通信而取得所述行驶信息。
[0016]
在第六方式所涉及的紧急车辆行驶系统中,由于取得部被设置于第二车辆上,因此,无需在第二车辆的外部设置新的取得部,从而能够实现低成本化。由此,取得部能够通过第一车辆与第二车辆之间的通信而取得与第一车辆的行驶状态相关的行驶信息。
[0017]
第七方式所涉及的紧急车辆行驶系统为,在第一方式至第六方式中的任意一个方式所述的紧急车辆行驶系统中,还具有紧急状态检测部,所述紧急状态检测部对所述第一车辆的紧急状态进行检测,在通过所述紧急状态检测部而检测出所述第一车辆成为了紧急车辆的情况下,所述取得部取得所述行驶信息。
[0018]
在第七方式所涉及的紧急车辆行驶系统中,具有对第一车辆的紧急状态进行检测的紧急状态检测部,通过紧急状态检测部而检测出第一车辆成为了紧急状态的情况。而且,在通过紧急状态检测部而检测出第一车辆成为了紧急状态的情况、即第一车辆成为了紧急车辆的情况的情况下,取得部取得与第一车辆的行驶状态相关的行驶信息。因此,能够提前取得与第一车辆的行驶状态相关的行驶信息。
[0019]
第八方式所涉及的紧急车辆行驶系统为,在第七方式所述的紧急车辆行驶系统中,所述紧急状态检测部为,被设置于所述第一车辆的内部且在紧急时被按压的紧急按钮。
[0020]
在第八方式所涉及的紧急车辆行驶系统中,由于在第一车辆的内部设置有紧急按钮,因此,通过在紧急时按压紧急按钮,从而能够提前检测出第一车辆成为了紧急状态的情况、即第一车辆成为了紧急车辆的情况。
[0021]
第九方式所涉及的紧急车辆行驶系统为,在第七方式所述的紧急车辆行驶系统中,所述紧急状态检测部为,对所述第一车辆的驾驶员的异常状态进行检测的生物体信息
检测部。
[0022]
在第九方式所涉及的紧急车辆行驶系统中,由于设置有对第一车辆的驾驶员的异常状态进行检测的生物体信息检测部,因此,通过生物体信息检测部而检测出第一车辆的驾驶员的异常状态。由此,能够提前检测出第一车辆成为了紧急状态的情况、即第一车辆成为了紧急车辆的情况。
[0023]
第十方式所涉及的紧急车辆行驶系统为,在第一方式至第九方式中的任意一个方式所述的紧急车辆行驶系统中,具有报知部,所述报知部向所述第二车辆的内部的乘员报知所述第一车辆的存在。
[0024]
在第十方式所涉及的紧急车辆行驶系统中,由于具有向第二车辆的内部的乘员报知第一车辆的存在的报知部,因此,能够通过报知部而提前向第二车辆的内部的乘员报知作为紧急车辆的第一车辆的存在。
[0025]
第十一方式所涉及的紧急车辆行驶系统为,在第二方式所述的紧急车辆行驶系统中,在实施所述第二车辆的远程驾驶的远程中心中设置有显示部,所述显示部以俯瞰的状态对所述第一车辆以及所述第二车辆的行驶进行显示。
[0026]
在第十一方式所涉及的紧急车辆行驶系统中,由于在远程中心中设置有以俯瞰的状态对第一车辆以及第二车辆的行驶进行显示的显示部,因此,能够通过远程驾驶而使第二车辆以避开作为紧急车辆的第一车辆的方式进行行驶。
[0027]
第十二方式所涉及的服务器装置具有:取得部,其取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息;切换部,其基于由所述取得部所取得的行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开所述第一车辆那样的自动驾驶状态。
[0028]
在第十二方式所涉及的服务器装置中,通过取得部而取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息。作为与第一车辆的行驶状态相关的行驶信息,例如,取得了第一车辆的行驶路径、行驶速度以及目的地等。而且,通过切换部,并基于由取得部所取得的行驶信息,从而将存在于距第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开第一车辆那样的自动驾驶状态。由此,第二车辆通过如避开第一车辆那样的自动驾驶而进行行驶。因此,能够使作为紧急车辆的第一车辆的周围的手动驾驶状态或远程驾驶状态的第二车辆顺利地避让第一车辆。
[0029]
第十三方式所涉及的紧急车辆行驶程序用于使计算机执行如下的步骤,即:取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息的步骤;基于所述行驶信息而将存在于距所述第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开所述第一车辆那样的自动驾驶状态的步骤。
[0030]
第十四方式所涉及的紧急车辆行驶控制装置被构成为,包括存储器和与所述存储器连接的处理器,所述处理器取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息,并基于所述行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开所述第一车辆那样的自动驾驶状态。
[0031]
第十五方式所涉及的紧急车辆行驶方法具有:取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息的工序;基于所述行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或自动驾驶状态的第二车辆切换为如避开所述第一车辆那样的远
程驾驶状态的工序。
[0032]
第十六方式所涉及的紧急车辆行驶方法具有:取得与作为紧急车辆的第一车辆的行驶状态相关的行驶信息的工序;基于所述行驶信息,而将存在于距所述第一车辆预定的范围内的手动驾驶状态或远程驾驶状态的第二车辆切换为如避开所述第一车辆那样的自动驾驶状态的工序。
[0033]
而且,根据本公开所涉及的紧急车辆行驶控制装置,无论何种驾驶模式均能够使紧急车辆的周围的车辆顺利地避让紧急车辆。
附图说明
[0034]
图1为表示第一实施方式所涉及的紧急车辆行驶系统的概要结构的图。
[0035]
图2为表示被搭载于车辆上的设备的硬件结构的框图。
[0036]
图3为表示车辆的功能结构的示例的框图。
[0037]
图4为表示取得装置的硬件结构的框图。
[0038]
图5为表示取得装置的功能结构的示例的框图。
[0039]
图6为表示服务器装置的硬件结构的框图。
[0040]
图7为表示服务器装置的功能结构的示例的框图。
[0041]
图8为表示由被搭载于车辆上的设备所执行的紧急车辆行驶控制处理的流程的流程图。
[0042]
图9为表示由取得装置所执行的紧急车辆行驶控制处理的流程的流程图。
[0043]
图10为表示由服务器装置所执行的紧急车辆行驶控制处理的流程的流程图。
[0044]
图11为在从上空俯瞰的状态下表示行驶于道路上的多台车辆的状态的图。
[0045]
图12为表示第二实施方式所涉及的紧急车辆行驶系统的概要结构的图。
[0046]
图13为表示搭载于远程操作装置上的设备的硬件结构的框图。
[0047]
图14为表示远程操作装置的功能结构的示例的框图。
[0048]
图15为表示由远程操作装置所执行的紧急车辆行驶控制处理的流程的流程图。
[0049]
图16为被显示于远程操作装置的显示装置上的图像、且表示行驶于道路上的多台车辆的状态的图。
[0050]
图17为表示第三实施方式所涉及的紧急车辆行驶系统中的车辆的功能结构的示例的框图。
具体实施方式
[0051]
以下,参照附图,对本公开的实施方式的一个示例进行说明。另外,对在各附图中相同或等效的结构要素以及部分标记相同的参照符号。
[0052]
〔第一实施方式〕
[0053]
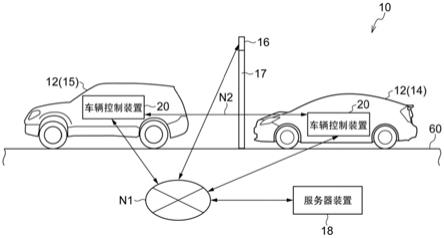
图1为表示第一实施方式所涉及的紧急车辆行驶系统的概要结构的图。
[0054]
如图1所示,紧急车辆行驶系统10被构成为,包括多台车辆12、取得装置16和服务器装置18。多台车辆12包括作为紧急车辆的第一车辆14、存在于距第一车辆14预定的范围内的第二车辆15。
[0055]
在第一实施方式中,如图1所示,以多台车辆12行驶于相同的前进方向的道路60上
的情况为例来进行说明。虽然在图1中,将参照符号分为第一车辆14和第二车辆15来示出,但在不区分第一车辆14和第二车辆15的情况下,将作为“车辆12”来进行说明。
[0056]
取得装置16取得与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。取得装置16为取得部的一个示例。取得装置16被设置于多台车辆12所行驶的道路60上。例如,取得装置16被安装在从道路60的侧部向上侧延伸的框架17上。另外,虽然省略了图示,但取得装置16在道路60上以预定的间隔(即,被预先设定的间隔)而被设置有多个。
[0057]
第一车辆14和第二车辆15分别具备车辆控制装置20。而且,在紧急车辆行驶系统10中,第一车辆14的车辆控制装置20、第二车辆15的车辆控制装置20、取得装置16以及服务器装置18经由网络n1而被相互连接。此外,各车辆控制装置20以能够相互通过车车间通信n2而直接进行通信的方式被构成。服务器装置18为紧急车辆行驶控制装置的一个示例。
[0058]
虽然在图1中,仅示出了作为紧急车辆的第一车辆14和行驶在第一车辆14的前侧的第二车辆15,但实际上也存在行驶于第一车辆14的周围行驶的多台第二车辆15(参照图11)。另外,虽然在图1所示的紧急车辆行驶系统10中,由一台服务器装置18而构成,但也可以包括两台以上的服务器装置18。
[0059]
在第一实施方式中,车辆12被构成为,能够实施基于由车辆控制装置20所生成的行驶计划而进行自主行驶的自动驾驶、基于由远程操作装置(省略图示)实现的作为远程驾驶员的远程驾驶人的操作的远程驾驶(即远程驾驶)、基于车辆12的乘员(即,驾驶员)的操作的手动驾驶。另外,车辆12也可以设为如下结构,即,不实施基于由远程操作装置(省略图示)实现的作为远程驾驶员的远程驾驶人的操作的远程驾驶的结构。
[0060]
(车辆)
[0061]
图2为表示被搭载于车辆12上的设备的硬件结构的框图。另外,虽然第一实施方式的车辆12在第一车辆14以及第二车辆15中具有同样的结构,但第一车辆14也可以具有不同的结构。如图2所示,车辆12除了上述的车辆控制装置20之外,还包括gps(global positioning system,全球定位系统)装置31、环境传感器(即,外部传感器)32、内部传感器33、输入装置34、作动器35、紧急按钮36、生物体信息检测部(即,生物体传感器)37、扬声器38。
[0062]
车辆控制装置20具有cpu(central processing unit,中央处理单元)21、rom(read only memory,只读存储器)22、ram(random access memory,随机存取存储器)23、储存器24、通信i/f(inter face,接口)25以及输入输出i/f26。cpu21、rom22、ram23、储存器24、通信i/f25以及输入输出i/f26经由总线29而以能够相互进行通信的方式被连接。
[0063]
cpu21为中央运算处理单元,并执行各种程序,或者对各部进行控制。cpu21从rom22或者储存器24中读取程序,并将ram23作为工作区域来执行程序。cpu21按照被记录于rom22或者储存器24中的程序,而实施上述各结构的控制以及各种运算处理。在第一实施方式中,在rom22或者储存器24中存储有紧急车辆行驶程序。
[0064]
rom22对各种程序以及各种数据进行存储。ram23作为工作区域而临时性地对程序或者数据进行存储。
[0065]
储存器24由hdd(hard disk drive,硬盘驱动器)或者ssd(solid state drive,固态驱动器)构成,并对包括操作系统在内的各种程序、以及各种数据进行存储。
[0066]
通信i/f25包括为了与其他的车辆控制装置20、取得装置16以及服务器装置18等
进行通信而与网络n1连接的接口。该接口例如使用了lte、wi-fi(即,wi-fi为在日本的注册商标)等通信标准。此外,通信i/f25包括通过利用了dsrc(dedicated short range communications,专用短距离通讯)等车车间通信n2而与其他的车辆控制装置20进行直接通信的无线装置。
[0067]
通信i/f25通过车车间通信n2(参照图1)而取得车辆12的周围的其他车辆12的行驶信息。作为行驶信息,包括其他车辆12的行驶方向、行驶速度、目的地、行驶路径、以及与其他车辆12之间的距离等。
[0068]
输入输出i/f26为,用于与被搭载于车辆12上的各装置进行通信的接口。车辆控制装置20经由输入输出i/f26而连接有gps装置31、环境传感器32、内部传感器33、输入装置34、作动器35、紧急按钮36、生物体信息检测部37以及扬声器38。另外,gps装置31、环境传感器32、内部传感器33、输入装置34、作动器35、紧急按钮36、生物体信息检测部37以及扬声器38也可以相对于总线29而被直接连接。
[0069]
gps装置31为,对车辆12的当前位置进行测量的装置。gps装置31包括接收来自gps卫星的信号的天线(省略图示)。
[0070]
环境传感器32为,对车辆12的周围的周边信息进行检测的传感器组。环境传感器32包括对预定范围进行拍摄的摄像机32a、向预定范围发送探测波并接收反射波的毫米波雷达32b、对预定范围进行扫描的激光雷达(laser imaging detection and ranging,激光成像探测与测距)32c。另外,摄像机32a可以具备多台。在该情况下,也可以设为,第一台摄像机32a对车辆12的前方侧的图像进行拍摄,第二台摄像机32a对车辆12的后方侧的图像进行拍摄。此外,也可以将多个摄像机32a中的一方设为可见光摄像机,将另一方设为红外线摄像机。
[0071]
内部传感器33为,对车辆12的行驶状态进行检测的传感器组。内部传感器33包括车速传感器、加速度传感器以及横摆率传感器中的至少一个。
[0072]
输入装置34为,用于供乘车于车辆12中的乘员操作的开关组。输入装置34包括作为使车辆12的转向轮转向的开关的转向盘34a、作为使车辆12加速的开关的加速踏板34b、和作为使车辆12减速的开关的制动踏板34c。
[0073]
作动器35包括使车辆12的转向轮驱动的方向盘作动器、对车辆12的加速进行控制的加速器作动器、对车辆12的减速进行控制的制动器作动器。
[0074]
紧急按钮36为,被设置于车辆12的内部且在紧急时被按压的按压按钮。紧急按钮36为紧急状态检测部的一个示例。在车辆12中,当发生了车辆12的内部的乘员的紧急状态时,通过紧急按钮36被按压,从而检测出车辆12为紧急状态的情况。
[0075]
生物体信息检测部37对车辆12的驾驶员等乘员的生物体信息进行检测。作为生物体信息,对乘员的心率、血压、脉搏、心电图、以及瞳孔的信息等的任意一个以上进行检测。在第一实施方式中,作为生物体信息检测部37,而设置有对车辆12的乘员的心率进行检测的心率传感器、对血压进行检测的血压传感器、对脉搏进行检测的脉搏传感器、对心电图进行检测的心电图传感器、以及对乘员的瞳孔进行拍摄的摄像机等的任意一个以上。生物体信息检测部37既可以被设置于车辆12的内部,也可以为车辆12的驾驶员所携带的便携终端。
[0076]
扬声器38通过语音而输出从服务器装置18被发送的信息的一部分。作为从服务器
装置18被发送的信息,例如,具有作为紧急车辆的第一车辆14的存在的信息等,并且作为紧急车辆的第一车辆14的存在的信息通过语音而被输出至第一车辆14的周围的预定范围内的第二车辆15。
[0077]
图3为表示车辆控制装置20的功能结构的示例的框图。
[0078]
如图3所示,车辆控制装置20具有通信部201、周边信息取得部202、自动驾驶控制部203、生物体信息检测部204、紧急车辆设定部205以及操作切换部206。通信部201、周边信息取得部202、自动驾驶控制部203、生物体信息检测部204、紧急车辆设定部205以及操作切换部206通过cpu21读取被存储于rom22或储存器24中的紧急车辆行驶程序并执行该程序,从而被实现。
[0079]
通信部201实施与其他车辆12的通信、与取得装置16的通信、以及与服务器装置18的通信。
[0080]
周边信息取得部202取得车辆12的周围的周边信息。周边信息取得部202经由输入输出i/f26而从环境传感器32取得车辆12的周围的周边信息。此外,周边信息取得部202通过车车间通信n2而接收车辆12的周围的周边信息。在周边信息中,不限于行驶于车辆12的周边的其他车辆12或行走在车辆12的周边的行人,还包括天气、亮度、行驶道路的宽度、以及障碍物等信息。此外,在周边信息中,包括行驶于车辆12的周边的其他车辆12的行驶方向、行驶速度、目的地、行驶路径、以及多台车辆12之间的距离等信息。而且,在周边信息中,包括气温、风速、降雨量等气象信息、震级、海啸等地震信息、拥堵、事故以及道路工程等交通信息。
[0081]
自动驾驶控制部203制作行驶计划,并基于该行驶计划而对实施自主行驶的车辆12的自动驾驶进行控制。在自动驾驶控制部203中,根据由周边信息取得部202所取得的周边信息、由gps装置31所取得的车辆12的位置信息、由内部传感器33所取得的车辆12的行驶信息等,而对车辆12的自动驾驶进行控制。在第一实施方式中,行驶于作为紧急车辆的第一车辆14的周围的手动驾驶的第二车辆15在被切换为自动驾驶之后,接收由取得装置16所取得的第一车辆14的行驶信息。而且,自动驾驶控制部203基于这些信息而对自动驾驶的车辆12的加减速以及转向进行控制。作为行驶信息,例如包括第一车辆14的行驶方向、行驶速度、目的地、行驶路径、以及与第一车辆14之间的距离等信息。
[0082]
生物体信息检测部204对车辆12的乘员的生物体信息的异常状态进行检测。生物体信息检测部204为紧急状态检测部的一个示例。生物体信息检测部204基于由生物体信息检测部37(参照图2)所检测出的生物体信息而对车辆12的乘员的生物体信息的异常状态进行检测。在第一实施方式中,生物体信息检测部204在例如生物体信息为阈值以上时,检测出车辆12的乘员的生物体信息的异常状态(即,判断为异常状态)。
[0083]
紧急车辆设定部205在紧急按钮36(参照图2)被按压时,或者在通过生物体信息检测部204而检测出车辆12的乘员的生物体信息的异常状态时,将车辆12设定为紧急车辆(即,作为紧急车辆的第一车辆14)。
[0084]
操作切换部206基于驾驶模式的输入信号,而切换为手动驾驶、自动驾驶以及远程驾驶中的任意一个驾驶模式。由操作切换部206所实施的驾驶模式的切换除了车辆12的乘员通过输入(例如,也包括选择)而对驾驶模式进行切换的情况之外,还存在基于来自服务器装置18的切换信号而切换为自动驾驶的情况。而且,由操作切换部206所实施的驾驶模式
的切换也存在基于来自远程操作装置(省略图示)的切换信号而切换为远程驾驶的情况。另外,在车辆12不进行远程驾驶的结构的情况下,不实施向远程驾驶的切换。
[0085]
(取得装置)
[0086]
图4为表示被搭载于取得装置16中的设备的硬件结构的框图。
[0087]
如图4所示,取得装置16被构成为,包括cpu41、rom42、ram43、储存器44、通信i/f45以及摄像机46。cpu41、rom42、ram43、储存器44、通信i/f45以及摄像机46经由总线49而以能够相互进行通信的方式被连接。cpu41、rom42、ram43、储存器44、通信i/f45的功能与车辆控制装置20的cpu21、rom22、ram23、储存器24以及通信i/f25相同。
[0088]
cpu41从rom42或者储存器44中读取程序,并将ram43作为工作区域来执行程序。在第一实施方式中,在rom42或者储存器44中,存储有紧急车辆行驶程序。摄像机46对行驶于预定范围的道路60上的多台车辆12进行拍摄。
[0089]
图5为表示取得装置16的功能结构的示例的框图。
[0090]
如图5所示,取得装置16具有行驶信息取得部401、接收部402以及发送部403。行驶信息取得部401、接收部402以及发送部403通过cpu41读取被存储于rom42或储存器44中的紧急车辆行驶程序并执行该程序,从而被实现。
[0091]
行驶信息取得部401取得与行驶于道路60上的多台车辆12的行驶状态相关的行驶信息。在第一实施方式中,行驶信息取得部401取得与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。作为行驶信息,例如,包括第一车辆14的行驶方向、行驶速度、目的地、行驶路径、以及与第一车辆14的周围的第二车辆15之间的距离等信息。
[0092]
接收部402经由网络n1而从多台车辆12接收与各个车辆12的行驶状态相关的周边信息。
[0093]
发送部403经由网络n1而向服务器装置18发送与多台车辆12的行驶状态相关的行驶信息。而且,发送部403经由网络n1而向服务器装置18发送与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。
[0094]
(服务器装置)
[0095]
图6为表示被搭载于服务器装置18上的设备的硬件结构的框图。
[0096]
如图6所示,服务器装置18被构成为,包括cpu51、rom52、ram53、储存器54以及通信i/f55。cpu51、rom52、ram53、储存器54以及通信i/f55经由总线59而以能够相互进行通信的方式被连接。cpu51、rom52、ram53、储存器54以及通信i/f55的功能与车辆控制装置20的cpu21、rom22、ram23、储存器24以及通信i/f25相同。
[0097]
cpu51从rom52或者储存器54中读取程序,并将ram53作为工作区域而执行程序。在第一实施方式中,在rom52或者储存器54中存储有紧急车辆行驶程序。
[0098]
图7为表示服务器装置18的功能结构的示例的框图。
[0099]
如图7所示,服务器装置18具有接收部501、切换部502、行驶控制部503、发送部504以及报知部505。接收部501、切换部502、行驶控制部503、发送部504以及报知部505通过cpu51读取被存储于rom52或储存器54中的紧急车辆行驶程序并执行该程序,从而被实现。
[0100]
接收部501从多台车辆12接收各个车辆12的周边信息。此外,接收部501接收与多台车辆12的行驶状态相关的行驶信息、以及与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。
[0101]
切换部502对车辆12向自动驾驶的切换进行控制。切换部502通过向车辆控制装置20输出切换信号,从而在车辆12中实施从手动驾驶或远程驾驶向自动驾驶的切换。在第一实施方式中,在设定了作为紧急车辆的第一车辆14的情况下,实施将第一车辆14的周围的第二车辆15从手动驾驶或远程驾驶切换为自动驾驶那样的控制。
[0102]
行驶控制部503对被切换为自动驾驶的第二车辆15的自动驾驶进行控制。行驶控制部503以避开第一车辆14的方式而实施使第二车辆15行驶或者使第二车辆15停车到道路60的角上等的控制。换言之,行驶控制部503控制为使第二车辆15从第一车辆14的行驶路径上避让那样的自动驾驶状态,以便不会妨碍第一车辆14的迅速且顺利的行驶。在第一实施方式中,行驶控制部503根据与第一车辆14的行驶状态相关的行驶信息、与第二车辆15的行驶状态相关的行驶信息以及第一车辆14的周围的周边信息,而以避开第一车辆14的方式对第二车辆15的加减速以及转向进行控制。
[0103]
发送部504向作为紧急车辆的第一车辆14的周围(在第一实施方式中为第一车辆14的预定范围内)的第二车辆15发送用于使第二车辆15以避开第一车辆14的行驶的方式进行行驶的由行驶控制部503所发出的控制信息。此外,向作为紧急车辆的第一车辆14的周围的第二车辆15发送与第一车辆14的行驶状态相关的行驶信息。作为行驶信息,例如,包括第一车辆14的行驶方向、行驶速度、目的地、行驶路径以及与第二车辆15之间的距离等信息。作为预定范围,例如,也可以以第一车辆14为中心而设定200m、400m、600m或800m等半径的圆形形状的范围。
[0104]
报知部505向作为紧急车辆的第一车辆14的周围(在第一实施方式中为第一车辆14的预定范围内)的第二车辆15的内部的乘员报知作为紧急车辆的第一车辆14的存在。报知部505经由发送部504而向第二车辆15的内部的乘员报知作为紧急车辆的第一车辆14的存在。例如,通过从扬声器38(参照图2)被输出的语音而向第二车辆15的内部的乘员报知作为紧急车辆的第一车辆14的存在。
[0105]
(控制的流程)
[0106]
接下来,对紧急车辆行驶系统10的作用进行说明。另外,由于按照时间序列的方式排列作用,因此,依次对车辆12的车辆控制装置20的作用、取得装置16的作用、服务器装置18的作用进行说明。
[0107]
图8为表示由车辆控制装置20所执行的紧急车辆行驶处理的流程的流程图。通过cpu21从rom22或储存器24中读取紧急车辆行驶程序且在ram23中展开并执行,从而实施紧急车辆行驶处理。
[0108]
在步骤s101中,cpu21对车辆12的内部的紧急按钮36是否被按压进行判断。
[0109]
在紧急按钮36未被按压的情况(即,在步骤s101中为“否”的情况)下,在步骤s102中,cpu21取得车辆12的内部的乘员的生物体信息。在第一实施方式中,通过生物体信息检测部37而检测出车辆12的乘员的心率、血压、脉搏、心电图以及瞳孔的信息等中的任意一个以上的生物体信息。
[0110]
在步骤s103中,cpu21对通过步骤s102而取得的生物体信息是否在阈值以上进行判断。阈值针对乘员的心率、血压、脉搏、心电图以及瞳孔的信息中的任意一个以上而分别被设定,当生物体信息为阈值以上时,被判断为车辆12的乘员的生物体信息处于异常状态。
[0111]
在紧急按钮36已被按压的情况(即,在步骤s101中为“是”的情况)下,或者在生物
体信息为阈值以上的情况(即,步骤s103中为“是”的情况)下,在步骤s104中,cpu21将车辆12设定为作为紧急车辆的第一车辆14。
[0112]
在生物体信息不在阈值以上的情况(即,步骤s103中为“否”的情况)下,cpu21结束基于紧急车辆行驶程序的处理。
[0113]
在步骤s105中,cpu21取得作为紧急车辆的第一车辆14的行驶信息。作为行驶信息,例如,包括第一车辆14的行驶方向、行驶速度、目的地、行驶路径以及与第一车辆14的周围的第二车辆15之间的距离等信息。
[0114]
在步骤s106中,cpu21向取得装置16发送作为紧急车辆的第一车辆14的行驶信息。由此,cpu21结束基于紧急车辆行驶程序的处理。
[0115]
图9为表示由被搭载于取得装置16中的设备所执行的紧急车辆行驶处理的流程的流程图。通过cpu41从rom42或储存器44读取紧急车辆行驶程序且在ram43中展开并执行,从而实施紧急车辆行驶处理。
[0116]
在步骤s111中,cpu41对是否存在作为紧急车辆的第一车辆14进行判断。
[0117]
在存在作为紧急车辆的第一车辆14的情况(即,步骤s111中为“是”的情况)下,在步骤s112中,cpu41取得作为紧急车辆的第一车辆14的行驶信息。
[0118]
在不存在作为紧急车辆的第一车辆14的情况(即,步骤s111中为“否”的情况)下,cpu41结束基于紧急车辆行驶程序的处理。
[0119]
在步骤s113中,cpu41取得作为紧急车辆的第一车辆14的周围的周边信息。作为周边信息,不限于行驶在第一车辆14的周边的第二车辆15或者行走在第一车辆14的周边的行人,还包括天气、亮度、行驶道路的宽度以及障碍物等信息。此外,在周边信息中,包括行驶于第一车辆14的周边的第二车辆15的行驶方向、行驶速度、以及第一车辆14与第二车辆15之间的距离等信息。而且,在周边信息中,包括气温、风速、降雨量等气象信息、震级、海啸等地震信息、拥堵、事故、以及道路工程等交通信息。
[0120]
在步骤s114中,cpu41向服务器装置18发送作为紧急车辆的第一车辆14的行驶信息。
[0121]
在步骤s115中,cpu41向服务器装置18发送作为紧急车辆的第一车辆14的周围的周边信息。由此,cpu41结束基于紧急车辆行驶程序的处理。
[0122]
图10为,表示由被搭载于服务器装置18中的设备所执行的紧急车辆行驶处理的流程的流程图。通过cpu51从rom52或储存器54中读取紧急车辆行驶程序且在ram53中展开并执行,从而实施紧急车辆行驶处理。
[0123]
在步骤s121中,cpu51从取得装置16接收作为紧急车辆的第一车辆14的行驶信息。
[0124]
在步骤s122中,cpu51从取得装置16接收作为紧急车辆的第一车辆14的周围的周边信息。
[0125]
在步骤s123中,cpu51基于第一车辆14的周围的周边信息而向第一车辆14的周围的预定范围内的多台第二车辆15报知作为紧急车辆的第一车辆14的存在。作为预定范围,例如,以第一车辆14为中心而设定了200m、400m、600m或800m等半径的圆形形状的范围。例如,当手动驾驶或远程驾驶的第二车辆15行驶于第一车辆14的周围时,存在妨碍第一车辆14的行驶的情况。作为预定范围,通过使第二车辆15避让第一车辆14,从而预先设定了不妨碍第一车辆14的行驶的范围。
[0126]
在步骤s124中,cpu51选择一台在第一车辆14的周围的预定范围内的第二车辆15。
[0127]
在步骤s125中,cpu51对在步骤s124中被选择的一台第二车辆15是否为自动驾驶进行判断。
[0128]
在被选择的一台第二车辆15并非自动驾驶的情况(即,步骤s125中为“否”的情况)下,在步骤s126中,cpu51将被选择的一台第二车辆15切换为自动驾驶。例如,在被选择的一台第二车辆15为手动驾驶或远程驾驶的情况下,第二车辆15从手动驾驶或远程驾驶被切换为自动驾驶。
[0129]
在被选择的一台第二车辆15为自动驾驶的情况(即,步骤s125中为“是”的情况)下,cpu51前进至步骤s127的处理。
[0130]
在步骤s127中,cpu51向自动驾驶的第二车辆15发送用于避让作为紧急车辆的第一车辆14的避让信号。避让信号为,用于根据作为紧急车辆的第一车辆14的行驶信息(目的地以及行驶路径等)而使自动驾驶的第二车辆15以避让第一车辆14的方式行驶或停止的信号。由此,作为紧急车辆的第一车辆14的周围的自动驾驶的第二车辆15避让第一车辆14。即,第二车辆15成为如避开第一车辆14那样的自动驾驶状态。
[0131]
在步骤s128中,cpu51对是否处理了第一车辆14的周围的预定范围内的全部第二车辆15进行判断。
[0132]
在未处理第一车辆14的周围的预定范围内的全部第二车辆15的情况(即,步骤s128中为“否”的情况)下,cpu51返回至步骤s124的处理。
[0133]
在处理了第一车辆14的周围的预定范围内的全部第二车辆15的情况(即,步骤s128中为“是”的情况)下,cpu51结束基于紧急车辆行驶程序的处理。
[0134]
如图11所示,在作为紧急车辆的第一车辆14进行行驶的情况下,当第一车辆14的周围的预定范围内的第二车辆15为手动驾驶或远程驾驶时,cpu51将第二车辆15切换为自动驾驶。而且,cpu51以避开第一车辆14的方式通过自动驾驶而使第二车辆15行驶。因此,能够使作为紧急车辆的第一车辆14的周围的手动驾驶或远程驾驶的第二车辆15顺利地避让第一车辆14。因此,能够使作为紧急车辆的第一车辆14迅速且顺利地行驶。
[0135]
〔第二实施方式〕
[0136]
图12为表示第二实施方式所涉及的紧急车辆行驶系统的概要结构的图。另外,关于与前述的第一实施方式相同的结构部分,标记相同的符号,并省略其说明。
[0137]
如图12所示,紧急车辆行驶系统70被构成为,包括多台车辆12、取得装置16、服务器装置18、被设置于远程中心73中的远程操作装置72。多台车辆12包括作为紧急车辆的第一车辆14、和存在于距第一车辆14预定的范围内的第二车辆15。
[0138]
远程操作装置72具备远程控制装置80。而且,在紧急车辆行驶系统70中,第一车辆14的车辆控制装置20、第二车辆15的车辆控制装置20、取得装置16、服务器装置18、以及远程操作装置72的远程控制装置80经由网络n1而被相互连接。此外,各车辆控制装置20以能够相互通过车车间通信n2而直接通信的方式被构成。
[0139]
车辆12被构成为,能够实施基于由车辆控制装置20所生成的行驶计划而进行自主行驶的自动驾驶、基于由远程操作装置72所执行的作为远程驾驶员的远程驾驶人的操作的远程驾驶(即远程驾驶)、基于车辆12的乘员(即,驾驶员)的操作的手动驾驶。
[0140]
(远程操作装置)
[0141]
图13为表示被搭载于远程操作装置72上的设备的硬件结构的框图。远程操作装置72除了上述的远程控制装置80之外,还包括显示装置91、扬声器92和输入装置93。
[0142]
远程控制装置80被构成为,包括cpu81、rom82、ram83、储存器84、通信i/f85以及输入输出i/f86。cpu81、rom82、ram83、储存器84、通信i/f85以及输入输出i/f86经由总线89而以能够相互通信的方式被连接在一起。cpu81、rom82、ram83、储存器84、通信i/f85以及输入输出i/f86的功能与上述的车辆控制装置20的cpu21、rom22、ram23、储存器24、通信i/f25以及输入输出i/f26相同。
[0143]
cpu81从rom82或者储存器84读取程序,并将ram83作为工作区域而执行程序。在第二实施方式中,紧急车辆行驶程序被存储在rom82中。
[0144]
在第二实施方式的远程控制装置80中,经由输入输出i/f86而连接有显示装置91、扬声器92以及输入装置93。另外,显示装置91、扬声器92以及输入装置93也可以相对于总线89而被直接连接。
[0145]
显示装置91为,用于使由车辆12的摄像机32a所拍摄到的拍摄图像以及车辆12所涉及的各种信息显示的液晶显示器。显示装置91为显示部的一个示例。在第二实施方式中,在显示装置91中,以俯瞰的状态显示了第一车辆14以及第一车辆14的周围的第二车辆15的行驶。更详细而言,cpu81基于从各个车辆控制装置20被发送的摄像机32a的拍摄图像,而实施用于以俯瞰的状态显示作为紧急车辆的第一车辆14以及第一车辆14的周围的第二车辆的行驶的图像处理。而且,实施了这些图像处理的图像信息被显示于显示装置91上。
[0146]
扬声器92为,通过附属于车辆12的摄像机32a的话筒(省略图示)而播放与拍摄图像一起被收录的语音的装置。
[0147]
输入装置93为,用于供作为利用远程操作装置72的远程驾驶员的远程驾驶人进行操作的控制器。输入装置93包括作为使车辆12的转向轮转向的开关的转向盘93a、作为使车辆12加速的开关的加速踏板93b、作为使车辆12减速的开关的制动踏板。另外,各输入装置93的方式并不限于此。例如,也可以代替转向盘93a而设置操纵杆开关。另外,例如,也可以代替加速踏板93b或制动踏板93c的踏板开关,而设置按钮开关或操纵杆开关。
[0148]
图14为表示远程控制装置80的功能结构的示例的框图。
[0149]
如图14所示,远程控制装置80具有通信部801、行驶信息取得部802、周边信息取得部803、切换部804以及远程驾驶控制部805。
[0150]
通信部801实施与利用远程驾驶的车辆12(在第二实施方式中为第二车辆15)的通信、与取得装置16的通信、与服务器装置18的通信。通过通信部801,接收从车辆控制装置20被发送的摄像机32a的拍摄图像以及语音、以及车速等车辆信息。被接收到的拍摄图像和车辆信息被显示在显示装置91上,语音信息从扬声器92被输出。
[0151]
行驶信息取得部802取得与行驶于道路60上的多台车辆12的行驶状态相关的行驶信息。在第二实施方式中,行驶信息取得部802取得与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。作为行驶信息,例如,包括第一车辆14的行驶方向、行驶速度、目的地、行驶路径、以及与第一车辆14的周围的第二车辆15之间的距离等信息。
[0152]
周边信息取得部803取得利用远程驾驶的车辆12(在第二实施方式中为第二车辆15)的周围的周边信息。在周边信息中,不限于行驶于车辆12的周边的其他的车辆12或行走在车辆12的周围的行人,还包括天气、亮度、行驶道路的宽度以及障碍物等信息。此外,在周
边信息中,包括在车辆12的周边行驶的其他的车辆12的行驶方向、行驶速度、多台车辆12间的距离等信息。而且,在周边信息中,包括气温、风速、降雨量等气象信息、震级、海啸等地震信息、拥堵、事故、以及道路工程等交通信息。
[0153]
切换部804实施车辆12(在第二实施方式中为第二车辆15)的向远程驾驶的切换。切换部804通过向车辆12的车辆控制装置20输出切换信号,从而实施从手动驾驶或自动驾驶向远程驾驶的切换。
[0154]
远程驾驶控制部805在实施了基于远程驾驶员的操作的远程驾驶的情况下,基于从各输入装置93被输入的信号,并经由通信部801而向车辆控制装置20发送用于实施远程驾驶的控制信息,从而对车辆12的远程驾驶进行控制。
[0155]
(服务器装置)
[0156]
虽然服务器装置18与第一实施方式的紧急车辆行驶系统10相比而硬件结构相同,但功能结构不同。在第二实施方式中,服务器装置18具有接收部501、发送部504以及报知部505(参照图7)。即,在第二实施方式中,服务器装置18不具有切换部和行驶控制部。
[0157]
(控制的流程)
[0158]
接下来,对紧急车辆行驶系统70的作用进行说明。另外,在紧急车辆行驶系统70中,第一实施方式的车辆12的作用(参照图8)以及取得装置16的作用(参照图9)相同。在紧急车辆行驶系统70中,与第一实施方式相比,服务器装置18的作用以及远程操作装置72的作用有所不同。
[0159]
服务器装置18的cpu51在实施了图10所示的流程图的步骤s121至步骤s123的处理之后,结束基于紧急车辆行驶程序的处理。
[0160]
图15为表示由被搭载于远程操作装置72上的设备所执行的紧急车辆行驶处理的流程的流程图。通过cpu81从rom82或储存器84读取紧急车辆行驶程序且在ram83中展开并执行,从而实施紧急车辆行驶处理。
[0161]
在步骤s131中,cpu81接收作为紧急车辆的第一车辆14的行驶信息。第一车辆14的行驶信息从服务器装置18或取得装置16被接收。
[0162]
在步骤s132中,cpu81接收作为紧急车辆的第一车辆14的周围的周边信息。第一车辆14的周围的周边信息从服务器装置18或取得装置16被接收。
[0163]
在步骤s133中,cpu81选择一台在作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15。作为预定范围,例如,以第一车辆14为中心而设定了200m、400m、600m、或800m等半径的圆形形状的范围。
[0164]
在步骤s134中,cpu81对在步骤s133中被选择的一台第二车辆15是否为远程驾驶进行判断。
[0165]
在被选择的一台第二车辆15并非远程驾驶的情况(即,步骤s134中为“否”的情况)下,在步骤s135中,cpu81将被选择的一台第二车辆15切换为远程驾驶。例如,在被选择的一台第二车辆15为手动驾驶或自动驾驶的情况下,第二车辆15从手动驾驶或自动驾驶被切换为远程驾驶。
[0166]
在被选择的一台第二车辆15为远程驾驶的情况(即,步骤s134中为“是”的情况)下,cpu81前进至步骤s136的处理。
[0167]
在步骤s136中,cpu81开始实施被选择的一台第二车辆15的远程控制。例如,通过
远程驾驶而使第二车辆15以避让作为紧急车辆的第一车辆14的方式进行行驶。即,第二车辆15成为如避开第一车辆14那样的远程驾驶状态。此时,如图16所示,在显示装置91上,以俯瞰的状态显示有作为紧急车辆的第一车辆14以及第一车辆14的周围的第二车辆15的行驶。因此,能够根据作为紧急车辆的第一车辆14的行驶信息(目的地、以及行驶路径等),通过远程驾驶而使第二车辆15以避让第一车辆14的方式进行行驶或停止。
[0168]
在步骤s137中,cpu81对是否处理了第一车辆14的周围的预定范围内的全部第二车辆15进行判断。
[0169]
在未处理第一车辆14的周围的预定范围内的全部第二车辆15的情况(即,步骤s137中为“否”的情况)下,cpu81返回至步骤s133的处理。
[0170]
在处理了第一车辆14的周围的预定范围内的全部第二车辆15的情况(即,步骤s137中为“是”的情况)下,cpu81结束基于紧急车辆行驶程序的处理。
[0171]
在图16中,示出了被显示于显示装置91上的图像。如图16所示,在作为紧急车辆的第一车辆14进行行驶的情况下,当第一车辆14的周围的预定范围内的第二车辆15为手动驾驶或自动驾驶时,cpu81将第二车辆15切换为远程驾驶。而且,cpu81通过远程驾驶而使第二车辆15以避开第一车辆14的方式进行行驶。因此,能够使作为紧急车辆的第一车辆14的周围的手动驾驶或自动驾驶的第二车辆15顺利地避让第一车辆14。因此,能够使作为紧急车辆的第一车辆14迅速且顺利地行驶。
[0172]
以上,对第一实施方式以及第二实施方式的紧急车辆行驶系统进行了说明。但是,本公开并未被限定于上述实施方式。能够实施各种各样的改良或者改变。
[0173]
虽然在第一实施方式的紧急车辆行驶系统10中,仅将作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15切换为自动驾驶,但本公开并未被限定于此。例如,也可以采用如下方式,即,在作为紧急车辆的第一车辆为手动驾驶或远程驾驶的情况下,将作为紧急车辆的第一车辆切换为自动驾驶。此外,例如,也可以采用如下方式,即,在作为紧急车辆的第一车辆为手动驾驶或自动驾驶的情况下,将作为紧急车辆的第一车辆切换为远程驾驶。此外,例如,也可以采用如下方式,即,在作为紧急车辆的第一车辆为手动驾驶、且由生物体信息检测部而检测出第一车辆的驾驶员的异常状态的情况下,将第一车辆切换为自动驾驶或远程驾驶。
[0174]
虽然在第一实施方式的紧急车辆行驶系统10中,服务器装置18将作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15切换为自动驾驶,但本公开并未被限定于此。例如,也可以采用如下方式,即,当由服务器装置向第二车辆报知了第一车辆14的存在时,被设置于第二车辆的内部的切换部(即,操作切换部)将第二车辆切换为自动驾驶。
[0175]
虽然在第一实施方式的紧急车辆行驶系统10中,将作为紧急车辆的第一车辆14的周围的预定范围内的手动驾驶或远程驾驶的第二车辆15切换为自动驾驶,但本公开并未被限定于此。例如,也可以采用如下方式,即,仅将作为紧急车辆的第一车辆14的周围的预定范围内的手动驾驶的第二车辆15切换为自动驾驶,远程驾驶的第二车辆15通过远程操作装置而以避开作为紧急车辆的第一车辆14的方式进行行驶。
[0176]
虽然在第一实施方式和第二实施方式的紧急车辆行驶系统10、70中,通过取得装置16而取得了与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息,但本公开并未被限定于此。在图17中,利用框图,而示出了第三实施方式所涉及的紧急车辆行驶系统中的车
辆的功能结构的示例。如图17所示,在第二车辆15的车辆控制装置200中,设置有作为取得部的行驶信息取得部208,所述行驶信息取得部208通过第一车辆14与第二车辆15之间的车车间通信n2,从而取得与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。由此,在第一车辆14的周围的预定范围内的第二车辆15中,通过行驶信息取得部208而取得与作为紧急车辆的第一车辆14的行驶状态相关的行驶信息。行驶信息取得部208也可以与取得装置16的行驶信息取得部401一并使用(参照图5)。此外,也可以不设置取得装置16的行驶信息取得部401,而仅设置行驶信息取得部208。
[0177]
虽然在第二实施方式的紧急车辆行驶系统70中,仅将作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15切换为远程驾驶,但本公开并未被限定于此。例如,也可以采用如下方式,即,在作为紧急车辆的第一车辆为手动驾驶或自动驾驶的情况下,将第一车辆切换为远程驾驶。此外,例如,也可以采用如下方式,即,在作为紧急车辆的第一车辆为手动驾驶或远程驾驶的情况下,将第一车辆切换为自动驾驶。
[0178]
虽然在第二实施方式的紧急车辆行驶系统70中,服务器装置18向作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15报知第一车辆14的存在,但本公开并未被限定于此。例如,也可以采用如下方式,即,远程操作装置72向作为紧急车辆的第一车辆14的周围的预定范围内的第二车辆15报知第一车辆14的存在。
[0179]
虽然在第二实施方式的紧急车辆行驶系统70中,将作为紧急车辆的第一车辆14的周围的预定范围内的手动驾驶或自动驾驶的第二车辆15切换为远程驾驶,但本公开并未被限定于此。例如,也可以采用如下方式,即,仅将作为紧急车辆的第一车辆14的周围的预定范围内的手动驾驶的第二车辆15切换为远程驾驶,自动驾驶的第二车辆15通过服务器装置而以避开作为紧急车辆的第一车辆14的方式对行驶进行控制。
[0180]
另外,在上述实施方式中,也可以由cpu以外的各种处理器来执行cpu21、41、51、81读取并执行软件(程序)的紧急车辆行驶处理。作为该情况下的处理器,可例示有fpga(field-programmable gate array:现场可编程门阵列)等能够在制造后变更电路结构的pld(programmable logic device:可编程逻辑器件)、以及asic(application specific integrated circuit:特定用途集成电路)等具有为了执行特定的处理而专门设计的电路结构的作为处理器的专用电路等。此外,既可以由这些各种处理器中的一个来执行紧急车辆行驶处理,也可以由同种类或不同种类的两个以上的处理器的组合(例如,多个fpga、以及cpu和fpga的组合等)来执行紧急车辆行驶处理。此外,更具体而言,上述各种处理器的硬件结构为,对半导体元件等的电路元件进行组合而成的电路。
[0181]
此外,在上述实施方式中,对行驶程序被预先存储(安装)在rom21、41、51、81或者储存器24、44、54、84中的方式进行了说明,但并未被限定于此。程序也可以以被记录于cd-rom(compact disc read only memory:只读光盘存储器)、dvd-rom(digital versatile disc read only memory:数字多功能光盘只读存储器)以及usb(universal serial bus:通用串行总线)存储器等记录介质中的方式而被提供。此外,程序也可以设为经由网络而从外部装置被下载的方式。
[0182]
2019年7月29日申请的日本申请2019-138982的公开内容的整体通过参照而被引入本说明书中。
[0183]
本说明书中所记载的所有文献、专利申请以及技术标准在与各个文献、专利申请
以及技术标准通过参照而被引入的情况被具体且分别记载的情况同等的程度上,通过参照而被引入本说明书中。
[0184]
符号说明
[0185]
10 紧急车辆行驶系统
[0186]
12 车辆
[0187]
14 第一车辆(紧急车辆)
[0188]
15 第二车辆(距紧急车辆预定范围内的车辆)
[0189]
16 取得装置(取得部)
[0190]
18 服务器装置
[0191]
36 紧急按钮(紧急状态检测部)
[0192]
60 道路
[0193]
70 紧急车辆行驶系统
[0194]
73 远程中心
[0195]
91 显示装置(显示部)
[0196]
204 生物体信息检测部(紧急状态检测部)
[0197]
208 行驶信息取得部(取得部)
[0198]
401 行驶信息取得部(取得部)
[0199]
502 切换部
[0200]
505 报知部
[0201]
802 行驶信息取得部(取得部)
[0202]
804 切换部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1