一种四向穿梭车救援遥控器及控制方法与流程
表示当前顶升位置在母道,“s”表示当前顶升位置在子道,“h”表示当前顶升位置在顶货位
16.本发明实施例的四向穿梭车救援遥控器至少具有如下效果:四向穿梭车发生故障时,操作者可以通过救援遥控器将四向穿梭车移动到检修工位,操作者通过救援遥控器的显示屏可以查看四向穿梭车的故障信息,方便检修人员排查故障。
附图说明
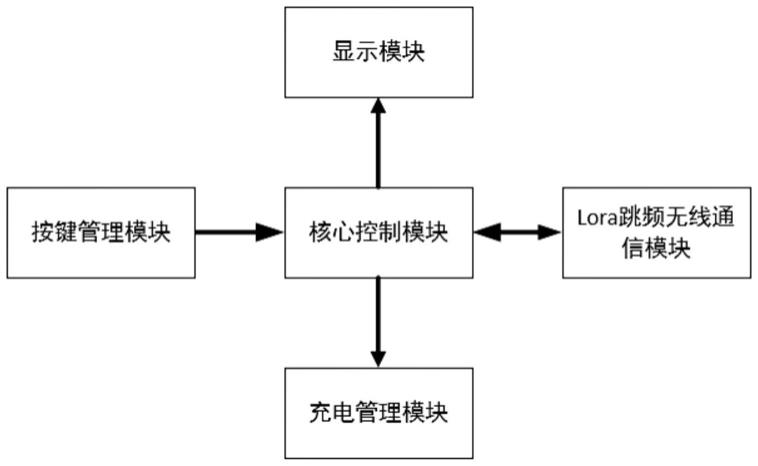
17.图1是本发明实施例中一种四向穿梭车救援遥控器的模块框图;
18.图2是本发明实施例中一种四向穿梭车救援遥控器的按键效果图;
具体实施方式
19.以下将结合实施例对本发明产生的技术效果进行清晰的描述。由于本发明涉及的实施例很多,所述实施例仅是本发明的一部分实施例,并非全部实施例,基于本发明的实施例,本领域技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。
20.参照图1,示出了本发明实施例中一种四向穿梭车救援遥控器,包括核心控制模块,按键管理模块,显示模块,lora跳频无线通信模块,充电管理模块。所述核心控制模块与lora跳频无线通信模块和充电管理模块连接,所述按键管理模块的输出端连接所述核心控制模块的输入端,所述核心控制模块的输出端连接所述显示模块的输入端。
21.所述核心控制模块包括存储器,用以存储程序和数据,并自动连续执行程序。所述按键管理模块用于接收操作者的操作指令。所述显示模块用于显示发送和接收数据信息。所述lora跳频无线通信模块用于接收和发送数据,使用433mhz工作频率并采用无线跳频技术,提高了抗干扰性能,增加了通信距离。所述充电管理模块用于管理可充电电池,保证四向穿梭车救援遥控器供电正常。
22.参照图2,示出了本发明实施例中一种四向穿梭车救援遥控器的按键效果图。主要包括显示屏、功能按键、急停按键、开关机按键。所述显示屏主要用于显示发送和接收的数据信息,所述功能按键主要用于接收操作者发出的操作命令,所述急停按键主要用于操作者发送急停命令,为了便于操作者使用,急停按键使用的是标准的急停按钮,所述开关机键主要用于打开或关闭四向穿梭车救援遥控器电源。
23.本实施方式中的四向穿梭车遥控器主要功能包括手动模式,半自动模式,自动模式。
24.所述手动模式包括急停,复位,手动前进,手动后退,取货,放货,寻车,前进指定距离,后退指定距离,换到子道,换到母道,m1去使能,m1重启,m2重启,救援机重启。
25.所述半自动模式包括急停,复位,手动前进,手动后退,取货,放货,子道前进到二维码,子道后退到二维码,母道前进到二维码,母道后退到二维码,寻车,前进指定距离,后退指定距离,换到子道,换到母道,m1去使能,m1重启,m2重启,救援机重启。
26.所述自动模式包括急停,复位,手动前进,手动后退,取货,放货,子道前进到二维码,子道后退到二维码,母道前进到二维码,母道后退到二维码,寻车,前进指定距离,后退指定距离,换到子道,换到母道,前进到孔,后退到孔,前入提升,前出提升,后入提升,后出提升,开启充电,关闭充电,m1去使能,m1重启,m2重启,救援机重启,rgv重启。
27.所述急停用于发送命令使运动过程中四向穿梭车紧急停止操作。
28.所述复位用于发送命令清除四向穿梭车出现的故障信息。
29.所述手动前进,用于发送命令使四向穿梭车在子道状态时往子道前方运动,在母道状态时往母道前方运动。
30.所述手动后退,用于发送命令使四向穿梭车在子道状态时往子道后方运动,在母道状态时往母道后方运动。
31.所述取货用于发送命令使四向穿梭车顶升板上升到顶货位置。
32.所述放货用于发送命令使四向穿梭车顶升板下降到子道位置。
33.所述子道前进到二维码,用于发送命令使四向穿梭车在子道状态时往子道前方移动,当运动到子母道交叉口张贴的二维码位置时停止,且如果移动距离超过1m仍未找到二维码则停止。
34.所述子道后退到二维码,用于发送命令使四向穿梭车在子道状态时往子道后方移动,当运动到子母道交叉口张贴的二维码位置时停止,且如果移动距离超过1m仍未找到二维码则停止。
35.所述母道前进到二维码,用于发送命令使四向穿梭车在母道状态时往母道前方移动,当运动到子母道交叉口张贴的二维码位置时停止,且如果移动距离超过1m仍未找到二维码则停止。
36.所述母道后退到二维码,用于发送命令使四向穿梭车在母道状态时往母道后方移动,当运动到子母道交叉口张贴的二维码位置时停止,且如果移动距离超过1m仍未找到二维码则停止。
37.所述寻车,用于选择被遥控四向穿梭车的车号,支持数字1至30。
38.所述前进指定距离,用于发送命令使四向穿梭车根据设定的距离值往前移动指定的距离,单位为cm,距离值范围为1至200。
39.所述后退指定距离,用于发送命令使四向穿梭车根据设定的距离值往后移动指定的距离,单位为cm,距离值范围为1至200。
40.所述换到子道,用于发送命令使四向穿梭车升降结构从其他状态运动到子道状态。
41.所述换到母道,用于发送命令使四向穿梭车升降结构从其他状态运动到母道状态。
42.所述前进到孔,用于发送命令使四向穿梭车往前运动到货架开孔位置。
43.所述后退到孔,用于发送命令使四向穿梭车向后运动到货架开孔位置。
44.所述前入提升,用于发送命令使四向穿梭车往前移动进入提升机。
45.所述前出提升,用于发送命令使四向穿梭车往前移动离开提升机。
46.所述后入提升,用于发送命令使四向穿梭车向后移动进入提升机。
47.所述后出提升,用于发送命令使四向穿梭车向后移动离开提升机。
48.所述开启充电,用于发送命令使四向穿梭车打开充电继电器。
49.所述关闭充电,用于发送命令使四向穿梭车关闭充电继电器。
50.所述m1去使能,用于发送命令使四向穿梭车断开行走电机伺服驱动器使能。
51.所述m1重启,用于发送命令使四向穿梭车行走电机伺服驱动器重新启动。
52.所述m2重启,用于发送命令使四向穿梭车顶升电机伺服驱动器重新启动。
53.所述救援机重启,用于发送命令使救援机接收器重新启动。
54.所述rgv重启,用于发送命令使四向穿梭车控制器重新启动。
55.操作者通过按键管理模块设置参数,控制四向穿梭车运行,具体操作主要包括如下步骤:
56.步骤1:长按电源开关机按键,显示模块显示中英文选择界面,选择en表示英文,选择cn表示中文;
57.步骤2:点击翻页键选择cn,点击确定键进入模式选择界面,并可以显示遥控器当前电池电压,电池充满电电压为4.2v。
58.步骤3:点击翻页键进入选车界面,点击“+
”“‑”
键选择车号,“19501”表示遥控器发射机的id号,点击确定键进行选车操作。
59.步骤4:点击翻页键进入模式切换界面,点击“+
”“‑”
键选择模式,点击确定键进行模式切换,可支持半自动模式,手动模式,监听模式,自动模式。
60.步骤5:配置电机与恢复电机,作用是切换驱动器的控制权。显示图标mc表示救援机直接控制驱动器,未显示图标表示救援机通过rgv控制器控制驱动器。如果需要切换为“半自动模式”,“手动模式”则需要首先配置电机,在操作完毕之后需要切换为“监听模式”或“自动模式”,此时需要恢复电机配置,由mc图标指示是否配置成功。
61.步骤6:在“半自动模式”或“手动模式”下在不确定当前rgv所处的位置时,经过操作者判断四向穿梭车当前状态,确认顶升板位置时可设置当前位置。“x”表示当前顶升位置不确定,不能执行前进或后退动作,“m”表示当前顶升位置在母道,“s”表示当前顶升位置在子道,“h”表示当前顶升位置在顶货位。
62.步骤7:参数配置完成后,即可进行四向穿梭车救援遥控器的常用功能操作。
63.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。此外,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1