一种基于生物共生的多无人系统协同方法及协同系统与流程
[0001]
本发明涉及无人系统协同控制领域,特别是涉及一种基于生物共生的多无人系统协同方法及协同系统。
背景技术:
[0002]
多机器人系统可以发挥单一结构机器人在某个领域的优点而达到整体的最优配置。特别是在军用领域方面,跨空间的多平台协同是当前的研究热点,如地空异构;此外,传统的“有人平台+一次性武器”的方式也向着“无人智能平台+智能可重复利用武器”的方向发展。结构、功能、性能等不同的无人系统之间的协同能够充分发挥各自的优势,从而高效的完成任务。
[0003]
随着计算机技术、人工智能技术和机器人技术的发展,多机器人的协同、群体智能、分布式系统等多智能平台系统的协同技术不断涌现。相关分析理论既有传统的系统论和协同论,也产生了群体智能、多智能体等新的分析理论。然而,在许多实际应用中,多个智能体存在结构异构、操作系统异构、感知传感异构等,随着人工智能技术和计算机技术的发展,亟需从智能体本身智能进化的角度分析异构协同和演化机制。
[0004]
大自然是解决群体智能协同问题灵感的来源,生物学上的共生现象恰是一种异构协同系统,犀牛虽然身形威猛,但高度近视,它与犀牛鸟形成了互相依赖的共生关系,犀牛供给犀牛鸟食物,犀牛鸟帮犀牛捉虱子,且为犀牛站岗放哨;鳄鱼和牙签鸟也同样存在类似的共生关系,鳄鱼为牙签鸟提供食物资源,牙签鸟帮鳄鱼清理牙垢,又帮鳄鱼放哨;再比如海洋中的鮣鱼与鲨鱼共舞,鮣鱼不仅在鲨鱼大餐之后可以吃点零星碎末,还为鲨鱼清理下侧表面的寄生物;霸翁斗老鹰也可认为是一种广义的共生现象,霸翁可以在俯冲飞行过程中利用嘴或爪抓住老鹰的背部或头部从而降落在老鹰的背上,并啄食老鹰的头部;乌鸦可在飞行过程中骑在老鹰的背上搭行“顺风车”;人和战马等驯养动物也是一种生物共生系统。生物界的共生现象可以借鉴到多机器人协同分析理论当中。
[0005]
共生(symbiosis)是生物科学中一个重要的基本概念,描述了生物界中的一个普遍现象。共生涉及生物学中许多分支学科,如微生物学、真菌学、病毒学等,甚至可以提高到生物哲学的范畴。德国生物学家德贝里于1879最早提出了共生的概念,认为共生是不同种属的生物生活在一起。后来,他又进一步论述了共生、寄生、腐生的关系,并分析了其相互之间的区别。斯哥特、玛格丽斯、高尔夫等进一步丰富和发展了德贝里的共生思想,逐步形成了系统的共生理论。共生理论的发展,不仅促使生物学科本身发展取得了巨大的进步,同时也逐步在其他领域得到广泛应用和发展,并取得了显著的成效,主要是有医学、农业、经济管理领域等。袁纯清在1998年率先应用共生理论研究小型经济,构建了基于共生理论的经济学分析框架,以共生三要素描述共生本质,以共生的密度、界面、模式等分析共生的关系状态。文献“基于共生理论的会展综合体设计研究[d].华南理工大学,侯晓,2019.”将共生理论应用到了会展综合体设计当中,指出会展综合体向“一体化互惠共生”的目标发展。文献“基于共生理论的运输方式发展模式及机理研究[d].长安大学,董彬,2017.”基于共生理
论研究了我国交通运输的发展问题,探索不同运输方式共生规律,为交通运输发展分析和决策提供了新的视角和方法,为科学构建综合运输体系提供特定视角的理念支持与实践依据,对促进我国交通运输业的发展具有重要的理论意义和实践价值。基于共生生物搜索算法也在优化算法当中得到了应用。共生理论对旅游、船舶、科技、教育等产业发展的演化机制研究具有指导意义。可以看出共生理论在社会、经济等领域起到了积极的分析引领作用,在多无人机智能系统协同领域具有潜在的理论指导价值。
[0006]
在现有理论中,协同论与共生理论存在多方面联系,首先它们都是研究系统各要素间的动态作用,其次都强调要素之间的合作效应,另外,都反映了系统的动态发展规律。尽管共生理论与协同论相比有许多相似之处,但在研究对象上,协同论重点在研究系统宏观性质,而共生理论则重点研究系统微观性质及宏观表现。此外,协同论并未揭示协同的内在机制,而共生理论揭示了这种机制,这一点对多无人智能系统的内在协同演化机制研究至关重要。
[0007]
但是现有技术并没有公开任何一种基于生物共生理论进行多无人系统的协同控制方法或系统。
技术实现要素:
[0008]
本发明的目的是提供一种基于生物共生的多无人系统协同方法及协同系统,以在弥补现有技术空白的基础上,能够对分析多无人平台协同控制、任务分配、感知融合、通信导航等军民用异构平台协同具有理论指导意义和实用价值。
[0009]
为实现上述目的,本发明提供了如下方案:
[0010]
一种基于生物共生的多无人系统协同方法,包括:
[0011]
获取目标任务以及共生环境;所述共生环境包括完成所述目标任务时所处的外界环境和完成所述目标任务时的电磁环境;
[0012]
根据所述目标任务类型确定完成候选无人系统共生单元;
[0013]
获取所述候选无人系统共生单元的质参量;所述质参量包括:无人系统共生单元的组织结构、功能性质和行为方式;
[0014]
根据所述质参量确定完成所述目标任务的无人系统共生单元,并确定各无人系统共生单元间的共生模式;所述共生模式包括:组织共生模式和行为共生模式;所述组织共生模式包括:点共生、间歇共生、连续共生和一体化共生;所述行为共生模式包括:寄生、偏利共生、非对称互惠共生和对称性互惠共生;
[0015]
根据所述共生模式生成共生界面;所述共生界面包括多无人机系统共生单元之间的接触方式和交互机制;
[0016]
根据所述共生界面和所述共生环境确定各所述无人系统共生单元的种类、数量和任务维度。
[0017]
优选的,还包括:
[0018]
获取分析判据;所述分析判据包括:各所述无人系统共生单元间的质参量兼容度、共生模式、共生利益和相变类型;
[0019]
根据所述分析判据确定各所述无人系统共生单元之间以及所述无人系统共生单元与所述共生环境间的联系。
[0020]
优选的,所述根据所述共生界面和所述共生环境确定各所述无人系统共生单元的种类、数量和任务维度,具体包括:
[0021]
获取各所述无人系统共生单元间的共生度;所述共生度为各所述无人系统共生单元间质参量相互关联的影响程度
[0022]
采用所述共生度、所述共生界面和所述共生模式确定各所述无人系统共生单元的种类、数量和任务维度。
[0023]
对应于上述提供的基于生物共生的多无人系统协同方法,本发明提供了如下协同系统:
[0024]
一种基于生物共生的多无人系统协同系统,包括:
[0025]
第一获取模块,用于获取目标任务以及共生环境;所述共生环境包括完成所述目标任务时所处的外界环境和完成所述目标任务时的电磁环境;
[0026]
共生单元确定模块,用于根据所述目标任务类型确定完成候选无人系统共生单元;
[0027]
第二获取模块,用于获取所述候选无人系统共生单元的质参量;所述质参量包括:无人系统共生单元的组织结构、功能性质和行为方式;
[0028]
共生模式确定模块,用于根据所述质参量确定完成所述目标任务的无人系统共生单元,并确定各无人系统共生单元间的共生模式;所述共生模式包括:组织共生模式和行为共生模式;所述组织共生模式包括:点共生、间歇共生、连续共生和一体化共生;所述行为共生模式包括:寄生、偏利共生、非对称互惠共生和对称性互惠共生;
[0029]
共生界面生成模块,用于根据所述共生模式生成共生界面;所述共生界面包括多无人机系统共生单元之间的接触方式和交互机制;
[0030]
种类-数量-维度确定模块,用于根据所述共生界面和所述共生环境确定各所述无人系统共生单元的种类、数量和任务维度。
[0031]
优选的,还包括:
[0032]
第三获取模块,用于获取分析判据;所述分析判据包括:各所述无人系统共生单元间的质参量兼容度、共生模式、共生利益和相变类型;
[0033]
联系确定模块,用于根据所述分析判据确定各所述无人系统共生单元之间以及所述无人系统共生单元与所述共生环境间的联系。
[0034]
优选的,所述种类-数量-维度确定模块具体包括:
[0035]
共生度获取单元,用于获取各所述无人系统共生单元间的共生度;所述共生度为各所述无人系统共生单元间质参量相互关联的影响程度
[0036]
种类-数量-维度确定单元,用于采用所述共生度、所述共生界面和所述共生模式确定各所述无人系统共生单元的种类、数量和任务维度。
[0037]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0038]
本发明提供的基于生物共生的多无人系统协同方法及协同系统,基于生物共生理论将无人系统单元作为一种生物智能体,从生物群体的角度出发,分析多无人系统的共生模式,基于该共生模式确定各共生单元(无人系统单元)的具体种类、数量和任务维度,以从生物学角度进行机理分析研究多智能平台协同共生的机制和协同演化的方向,从不断智能化的平台自身的角度出发,对多无人系统单元进行协同控制,进而对分析多无人平台协同
控制、任务分配、感知融合、通信导航等军民用异构平台协同具有理论指导意义和实用价值,同时,能够提高对多无人系统单元进行协同控制的精确度。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0040]
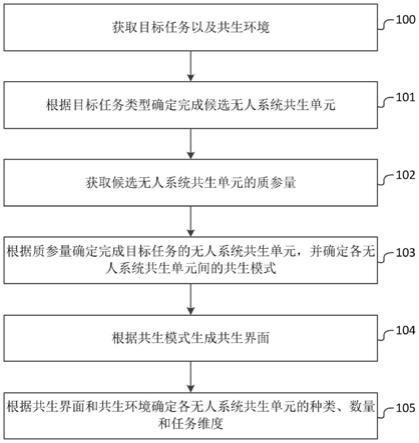
图1为本发明提供的基于生物共生的多无人系统协同方法的流程图;
[0041]
图2为本发明实施例中无人系统共生要素组成图;
[0042]
图3为本发明实施例中多无人系统共生模式;
[0043]
图4为本发明实施例中基于生物共生的多无人系统协同机制结构图;
[0044]
图5为本发明实施例中基于生物共生理论的多无人系统共生模型建立流程图;
[0045]
图6为本发明实施例中基于生物共生理论的多无人系统共生条件分析图;
[0046]
图7为本发明实施例中多无人系统共生原理分析图;
[0047]
图8为本发明实施例中多无人系统共生现象分析图;
[0048]
图9为本发明实施例中多无人系统共生理论分析方法流程图;
[0049]
图10为本发明实施例中多无人机共生系统架构图;
[0050]
图11为本发明实施例中空天海无人共生系统架构图。
[0051]
图12为本发明提供的基于生物共生的多无人系统协同系统的结构示意图。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
本发明所基于的生物共生理论是将机器人作为一种生物智能体,从生物群体的角度出发,分析多无人系统的共生体系。从生物学角度进行机理分析研究多智能平台协同共生的机制和协同演化的方向。从不断智能化的平台自身的角度出发,分析多机器人系统之间的协同。本发明提供的基于生物共生的多无人系统协同方法及协同系统,对分析多无人平台协同控制、任务分配、感知融合、通信导航等军民用异构平台协同具有理论指导意义和实用价值。
[0054]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0055]
图1为本发明提供的基于生物共生的多无人系统协同方法的流程图,如图1所示,一种基于生物共生的多无人系统协同方法,包括:
[0056]
步骤100:获取目标任务以及共生环境。共生环境包括完成目标任务时所处的外界环境和完成目标任务时的电磁环境。
[0057]
步骤101:根据目标任务类型确定完成候选无人系统共生单元。
[0058]
步骤102:获取候选无人系统共生单元的质参量。质参量包括:无人系统共生单元的组织结构、功能性质和行为方式。
[0059]
步骤103:根据质参量确定完成目标任务的无人系统共生单元,并确定各无人系统共生单元间的共生模式。共生模式包括:组织共生模式和行为共生模式。组织共生模式包括:点共生、间歇共生、连续共生和一体化共生。行为共生模式包括:寄生、偏利共生、非对称互惠共生和对称性互惠共生。
[0060]
步骤104:根据共生模式生成共生界面。共生界面包括:多无人机系统共生单元之间的接触方式和交互机制。
[0061]
步骤105:根据共生界面和共生环境确定各无人系统共生单元的种类、数量和任务维度。该步骤具体包括:
[0062]
获取各无人系统共生单元间的共生度。共生度为各无人系统共生单元间质参量相互关联的影响程度
[0063]
采用共生度、共生界面和共生模式确定各无人系统共生单元的种类、数量和任务维度。
[0064]
进一步本发明提供的上述基于生物共生的多无人系统协同方法还优选包括:
[0065]
获取分析判据。分析判据包括:各无人系统共生单元间的质参量兼容度、共生模式、共生利益和相变类型。
[0066]
根据分析判据确定各无人系统共生单元之间以及无人系统共生单元与共生环境间的联系。
[0067]
基于本发明上述公开的多无人系统协同方法,在具体实施的过程中,其包括两个部分,其一部分为多无人系统共生模型的建立,另一部分为协同机制进行协同分析、控制的具体流程。下面对上述两个部分进行详细说明。
[0068]
该协同机制基于生物学共生理论建立多无人系统的共生模型。上述协同方法采用生物共生相关方法分析多无人系统的体系结构、协同组织和演化机制。
[0069]
机制包括多无人系统共生模型的建立、多无人系统共生条件的分析、多无人系统共生原理的分析和多无人系统共生现象的识别和多无人系统共生理论的分析。
[0070]
共生模型基于共生原理建立,包括多无人系统协同共生单元、多无人系统共生模式、无人系统之间的共生界面、多无人系统的整体共生环境等共生要素,其中多无人系统共生单元以一定的共生模式通过共生界面进行交互活动在共生环境内。基于生物共生理论的多无人系统共生模型建立的步骤包括多无人系统协同任务分析、多无人洗系统协同环境分析、多无人系统共生单元的选取、多无人系统协同模式的选择。
[0071]
多无人系统共生单元(后续简称为共生单元)为具有一定功能的单个无人系统,为多无人系统共生关系中基本的能量、信息、功能等生产和交换单位,如无人车、无人机、无人潜艇、卫星和导弹等。
[0072]
用质参量表达无人系统的内在性质,用象参量表达无人系统的外部特征。根据多无人系统的结构、功能和属性,可将无人系统分为同类型的无人系统和异类型的无人系统。
[0073]
多无人系统共生单元协同共生的方式称为共生模式,从多无人系统组织方式上来讲可分为点共生、间歇共生、连续共生和一体化共生,从多无人系统的行为模式上分为寄生、偏利共生、非对称互惠共生和对称性互惠共生。
[0074]
多无人机系统的点共生是指多个无人系统之间在某一特定时刻、某一方面具有一次相互作用,具有随机性和不稳定性。间歇性共生是多无人系统按某种时间间隔进行相互作用。连续性共生是多无人系统在某封闭时空内进行连续的相互作用,如多无人机系统中的主机和僚机之间就是连续性共生。一体化共生是多无人系统在一定的时空内形成具有独立性质和功能的共生体,如无人机与无人车一体化共生形成既可以在地面跑又可以在空中飞的飞行汽车。寄生是一个无人系统寄生在另一个无人系统上,两个系统共生在一起但不产生新的能量,其中寄主向寄生者单向传输能量,如导航卫星和依赖卫星导航的无人系统。偏利共生中无人系统产生新的能量,其中一方获得全部新的能量,如导弹、无人机和发射系统之间就是偏利共生关系。非对称互惠共生中产生新的能量,存在双边和多边交流,新的能量分配不对称,如地面机器人和空中机器人协同建图,分布式无人机编队。对称性互惠共生是共生关系中的理想类型,具有效率高、稳定性强的特点,各无人系统协同分工合作,如流水线协作机器人,航母编队等。
[0075]
多无人机系统之间的接触方式和交互机制为共生界面,多无人系统之间通过共生界面进行物质、信息和能量传导。共生单元通过共生界面实现相互交流和传递,如电磁波、超声波等。物质交流如协同抓取搬运对物品的协同搬运传递。能量传递如光、热、电等能量的传输。
[0076]
多无人系统进行活动的外部状况的总和称为共生环境,共生环境是多无人系统协同共生产生和发展的基础,如地理、气象、电磁等环境。共生环境对无人系统的影响分为激励作用、中性作用和反抗作用,如在收到电磁干扰的环境中,对无人系统的通信导航是起到反抗作用的。
[0077]
多无人系统协同共生过程中通过共生界面产生的效用称为共生能量,共生能量可以用来描述共生模式、共生单元、共生环境相互作用的稳定性和效果,用于多无人系统协同共生单元效率的改进,表现为多无人系统中个体生存能力的提高和效率的提高。
[0078]
上述协同方法基于质参量兼容、共生能量生成、共生界面选择、共生系统相变、共生系统进化等原理,分析多无人系统协同共生系统组成与优化过程中的基本准则与内在联系。分析多无人系统协同中的微观动力过程及其与宏观性质的关系。
[0079]
质参量为决定无人系统内在性质及其变化的因素,包括无人系统的组织结构、功能性质和行为方式等。
[0080]
质参量兼容指候选的共生单元的质参量之间可以相互表达,即无人系统个体之间可以进行信息的交互和功能上的互补等作用。质参量兼容与否决定了共生关系形成的可能性,兼容方式决定了共生模式。
[0081]
基于质参量兼容原理对多无人共生系统进行共生单元选择、共生模式设置。
[0082]
共生能量即共生利益,为多无人系统协同共生过程中通过共生界面实现某种功能、完成某种任务,产生共生利益是共生的目的。
[0083]
协同功能的效果和任务的达成度用来描述共生模式、共生单元、共生环境相互作用的稳定性和效果。基于共生能量生成原理对多无人系统协同的目的和成效进行分析设置,用于改进多无人系统协同共生单元的效率。
[0084]
共生界面选择包括共生单元选择和共生能量使用选择。基于共生界面选择对多无人系统协同的共生单元的种类、数量和任务维度进行设置。
[0085]
共生相变是指共生系统从一种状态向另一种状态转变的过程,即共生模式的转换,由共生能量的不对称分配、不匹配使用和共生度变化驱动。基于共生系统相变原理对多无人系统共生模式的进行分析和设计。
[0086]
共生进化影响共生单元的生存率和效率,共生单元生存率和效率的提高就是共生进化,对称性互惠共生是共生系统进化的方向。基于共生进化原理对多无人系统的协同共生进行优化和改造,最终使多无人系统达到对称性互惠共生,在共生能量、共生效率和系统稳定性方面都达到最优。
[0087]
上述协同方法采用质参量兼容、共生组织模式、共生行为模式、共生利益生成、共生系统与环境关系、共生系统相变类型、共生系统进化方向和共生系统稳定性等判据,分析多无人系统协同共生现象,分析多无人系统共生单元之间、共生单元与共生环境之间的联系。
[0088]
共生关系必须是由存在质参量兼容的共生单元构成的关系,具有这种关系的多无人系统才存在共生现象。
[0089]
共生组织模式判据用于判断多无人系统共生现象属于哪种组织模式,根据共生界面的特征可分为点共生、间歇共生、连续共生和一体化共生。
[0090]
共生利益及分配情况来判断多无人系统共生现象属于哪种行为模式,根据共生利益特征和分配情况分为寄生、偏利共生、非对称性互惠共生和对称性互惠共生。
[0091]
能够产生共生利益是多无人系统存在和发展的基本条件,只有两个共生单元相互影响的共生度均为正向的有利益对方的才会产生共生利益。
[0092]
共生环境对多无人系统活动的利害影响可分为激励作用、中性作用和反抗作用。
[0093]
共生系统相变类型用于判断多无人系统发展变化的机制与方向,受共生度、共生利益分配等因素驱动。
[0094]
对称性互惠共生是多无人系统协同共生进化的最终方向,反映了多无人系统共生单元之间、共生单元与共生系统之间根本的发展趋势。
[0095]
共生单元之间的质参量兼容程度要优于单元之间的共生度,共生系统才具有一定的稳定性,否则共生系统将发生相变甚至崩溃。
[0096]
上述协同方法采用共生度、共生界面、共生模式等分析方法分析多无人系共生成因与特征。
[0097]
共生度是两个无人系统共生单元之间的质参量相互关联影响的程度,是共生系统最基本的特征量,通过对共生度的分析,对多无人系统的共生的内在本质联系和共生的成因进行分析。
[0098]
共生介质可能是有形的也可能是无形的,通过共生界面特征系数、利益分配系数和对称分配因子进行描述,对共生界面的分析用于对多无人共生系统的协同效率和协同稳定性进行分析。
[0099]
共生模式反映共生单元的组织方式和行为方式,通过对共生模式的相变分析,揭示各种模式之间的联系与区别,用于分析多无人系统的共生相变和共生系统的进化机制。
[0100]
基于此,本发明提供的协同方法着眼于智能系统的内生机制,建立多无人共生系统分析的概念工具和逻辑结构。机制与方法用于揭示智能无人系统协同的本质、系统要素之间的运作方式与规律。
[0101]
下面提供一个具体实施案例进一步说明本发明的方案,在具体应用时,本发明的方案也适用于其他实施方式。
[0102]
如图2所示,多无人系统协同共生系统包括多种共生要素,其是由共生单元按某种共生模式构成的共生关系的集合。其中,共生单元是基础,共生模式是关键,共生界面是前提,共生环境是外部条件。
[0103]
多无人系统中的共生单元是各机器人智能体,如地面机器人、空中无人机、水下潜航器、太空中的卫星等。共生单元是共生关系中的基本能量生产和交换单位,是形成共生体的基本物质条件。
[0104]
采用质参量和象参量这两个基本参数来描述无人系统的特征,质参量和象参量分别描述无人系统的共生单元的内在性质和外部特征,两者之间的相互作用是共生关系形成、存在、发展的基本动力和内在依据。质参量是决定共生单元内在性质及其变化的因素,机器人的质参量往往不止一个,而是存在一组质参量,它们共同决定机器人的内部性质。在这一组质参量中,各个质参量的地位是不同的,而且也是变化的,在特定时空条件下,往往有一个质参量起主导作用,称之为主质参量,主质参量在共生关系的形成中具有关键作用。象参量是反映共生单元外部特征的因素,机器人的象参量也不是惟一的,往往是一组象参量从不同角度分别反映其外部特征。机器人单元的质参量和象参量的关系随时空条件和共生关系的变化而变化。在共生关系中,质参量和象参量的相互作用是共生单元存在和发展的基本动力,也是共生关系形成和发展的内在依据和基本条件,不同共生单元的相互作用通过质参量和象参量之间两两相互作用体现出来。
[0105]
在多无人系统共生系统中共生界面既可以为无形界面,也可以为有形界面。多无人系统之间的有形共生界面如平台物理接触界面,无形共生界面如信息共享传输界面、任务协同界面等。共生界面是指共生单元之间物质、信息和能量传导的媒介、通道或载体,它是共生关系形成和发展的基础。
[0106]
多无人系统共生单元通过共生界面进行相互作用,包括信息传输、物质交流、能量传导、分工合作和共生序的形成功能。共生界面的功能影响了共生度的大小,若共生界面的物质信息和能量的传递速率快,则有利于形成理想的共生度,反之,若共生界面的物质信息和能量的传递速率慢,则不利于实现理想的共生度。
[0107]
将共生单元以外的所有因素称之为共生环境,是共生关系存在发展的外在条件。共生环境按照不同的标准可以划分为不同的类型,如按照影响程度可分为主要环境和次要环境,主、次的具体标准随时间变化会有所改变。按照影响方式可分为直接环境和间接环境。多无人系统共生关系存在的环境往往并不唯一,具有多层次的特点。共生环境有正向、中性和反向三种类型,两者之间的影响作用也表现为三种,即积极促进作用、中性作用和消极抑制作用。
[0108]
多无人系统中共生单元相互作用的方式或相互结合的形式称之为共生模式,它既反映共生单元之间的作用方式,也反映作用强度,同时还反映共生单元之间的利益和信息关系。根据共生单元之间利益和信息的交流与联系方式的不同,可分为共生组织模式和共生行为模式,如图3所示。其中多无人系统共生的组织模式主要包括:点共生、间歇共生、连续共生和一体化共生。多无人系统共生的行为模式主要包括:寄生、偏利共生和互利共生,而互利共生又有非对称性互利共生和对称性互利共生之分。
[0109]
多无人系统共生的组织模式和行为模式共同构成共生关系状态集合。共生组织模式和行为模式的组合决定了共生系统的状态,记s(m,p)为系统状态向量,其中m为组织模式向量,p为行为模式向量。根据对上面对共生模式的对比分析,将共生组织模式和共生行为模式组合可得到共生系统的16种基本状态,如表1所示。
[0110]
表1多无人共生系统状态表
[0111][0112]
多无人系统从一种状态向另一种状态的转变过程称为共生系统相变,如表2所示。
[0113]
表2多无人系统共生相变表
[0114][0115][0116]
多无人系统在共生过程中,无论共生单元本身,还是共生关系、共生环境或整个共生系统,都处在一个不断变化、发展的动态过程中。多无人系统之间的相互作用的方式、相互结合的类型,即在行为维度、组织维度上并非一成不变,共生行为维度的变化有时会引起共生组织维度的变化,同样,共生组织维度的变化有时也会引起共生行为维度的变化。相变是共生系统发展变化的重要特征和机制,相变原理揭示了多无人系统共生系统状态变化的基本规律。共生系统状态的变化有三种类型,一是只在组织维度向量m一个方向上发生的状态变化,称之为m相变,二是只在行为维度向量p一个方向上发生的状态变化,称为p相变,三是同时在m、p两个方向上发生的状态变化称为混合相变。另外,任何相临的两个状态之间发
生的变化又称为连续相变,任何不相临的两个状态之间发生的变化称为不连续相变。在协同过程中,既要分析m相变、p相变,又要分析连续、不连续相变。
[0117]
相变可能向进化方向进行,但也可能会向退化方向进行。当相变促进共生单元和共生系统的发展时,属于进化相变。当相变阻碍共生单元和共生系统的发展时,属于退化相变。在共生系统中,进化是共生系统发展的总趋势和总方向,任何单元都是共进化中的单元,任何进化都是单元之间的共同进化。
[0118]
对多无人系统的共生机制分析如图4所示,包括多无人系统共生模型的建立、多无人系统共生条件的分析、多无人系统共生原理的分析和多无人系统共生现象的识别和多无人系统共生理论的分析。
[0119]
基于生物共生理论的多无人系统共生模型建立的步骤如图5所示,包括多无人系统协同任务分析、多无人洗系统协同环境分析、多无人系统共生单元的选取、多无人系统协同模式的选择。
[0120]
多无人系统共生条件分析如图6所示,包括静态均衡条件分析、动态均衡条件分析和一般均衡条件分析。其中静态均衡条件包括必要条件和充分条件,动态均衡条件包括维度均衡、密度均衡和结构均衡,一般均衡条件包括时空联系、利益信息和符合规律等条件。
[0121]
多无人系统共生原理分析如图7所示,包括基于质参量兼容、共生能量生成、共生界面选择、共生系统相变、共生系统进化等原理,分析多无人系统协同共生系统组成与优化过程中的基本准则与内在联系。分析多无人系统协同中的微观动力过程及其与宏观性质的关系。
[0122]
质参量为决定无人系统内在性质及其变化的因素,包括无人系统的组织结构、功能性质和行为方式等。质参量兼容的指候选的共生单元的质参量之间可以相互表达,即无人系统个体之间可以进行信息的交互和功能上的互补等作用。质参量兼容与否决定了共生关系形成的可能性,兼容方式决定了共生模式。基于质参量兼容原理对多无人共生系统进行共生单元选择、共生模式设置。共生能量即共生利益,为多无人系统协同共生过程中通过共生界面实现某种功能、完成某种任务,产生共生利益是共生的目的。协同功能的效果和任务的达成度用来描述共生模式、共生单元、共生环境相互作用的稳定性和效果。基于共生能量生成原理对多无人系统协同的目的和成效进行分析设置,用于多无人系统协同共生单元效率的改进。共生界面选择包括共生单元选择和共生能量使用选择。基于共生界面选择对多无人系统协同的共生单元的种类、数量和任务维度进行设置。
[0123]
共生相变是指共生系统从一种状态向另一种状态转变的过程,即共生模式的转换,由共生能量的不对称分配、不匹配使用和共生度变化驱动。基于共生系统相变原理对多无人系统共生模式的进行分析和设计。共生进化影响共生单元的生存率和效率,共生单元生存率和效率的提高就是共生进化,对称性互惠共生是共生系统进化的方向。基于共生进化原理对多无人系统的协同共生进行优化和改造,最终使多无人系统达到对称性互惠共生,在共生能量、共生效率和系统稳定性方面都达到最优。
[0124]
多无人系统共生现象分析如图8所示,采用质参量兼容、共生组织模式、共生行为模式、共生利益生成、共生系统与环境关系、共生系统相变类型、共生系统进化方向和共生系统稳定性等判据,分析多无人系统协同共生现象,分析多无人系统共生单元之间、共生单元与共生环境之间的联系。
[0125]
共生关系必须是由存在质参量兼容的共生单元构成的关系,具有这种关系的多无人系统才存在共生现象。共生组织模式判据用于判断多无人系统共生现象属于哪种组织模式,根据共生界面的特征可分为点共生、间歇共生、连续共生和一体化共生。共生利益及分配情况来判断多无人系统共生现象属于哪种行为模式,根据共生利益特征和分配情况分为寄生、偏利共生、非对称性互惠共生和对称性互惠共生。能够产生共生利益是多无人系统存在和发展的基本条件,只有两个共生单元相互影响的共生度均为正向的有利益对方的才会产生共生利益。共生环境对多无人系统活动的利害影响可分为激励作用、中性作用和反抗作用。共生系统相变类型用于判断多无人系统发展变化的机制与方向,受共生度、共生利益分配等因素驱动。对称性互惠共生是多无人系统协同共生进化的最终方向,反映了多无人系统共生单元之间、共生单元与共生系统之间根本的发展趋势。共生单元之间的质参量兼容程度要优于单元之间的共生度,共生系统才具有一定的稳定性,否则共生系统将发生相变甚至崩溃。
[0126]
多无人系统共生理论分析如图9所示,采用共生度、共生界面、共生模式等分析方法分析多无人系统的成因与特征。
[0127]
共生度是两个无人系统共生单元之间的质参量相互关联影响的程度,是共生系统最基本的特征量,通过对共生度的分析,对多无人系统的共生的内在本质联系和共生的成因进行分析。共生介质可能是有形的也可能是无形的,通过共生界面特征系数、利益分配系数和对称分配因子进行描述,对共生界面的分析用于对多无人共生系统的协同效率和协同稳定性进行分析。共生模式反映共生单元的组织方式和行为方式,通过对共生模式的相变分析,揭示各种模式之间的联系与区别,用于分析多无人系统的共生相变和共生系统的进化机制。
[0128]
下面列举两个具体实施案例对本发明提供的协同方法进行进一步的说明。
[0129]
图10所示为一多无人机共生系统,任务为对地面可疑目标1104、1105进行侦查,确定为敌方威胁目标后执行打击消灭。基于此目标任务,为实现该任务需要两类无人机协同完成,一类执行侦查,即确定目标的位置、类型,判断是否为敌方威胁目标。另一类执行打击任务,对目标进行攻击消灭。
[0130]
基于所选的共生单元构建两类无人机的协同共生模型。如图10所示,1100为无人机执行任务所处的地空环境的总和称为共生环境,共生单元包括侦查无人机1101、1102,攻击无人机1103、1104。两类无人机为异类共生单元。侦查无人机1102、1103和攻击无人机1103、1104均为同类共生单元。无人机之间的通信1107是多无人机共生界面之一,对地面可疑目标的侦查打击任务1108的执行也是共生界面之一。在共生界面1107上实现多无人机的信息交互,在共生界面1108上完成协同任务。该多无人机协同共生系统的建立按照图5所示的方法完成,通过对协同任务的分析和共生环境的分析,选定一定数量和一定种类的无人机。因此,共生模式从组织方式上为连续性共生,从行为模式上分析为非对称的互惠共生。对共生系统的条件分析如图6所示,包括共生系统的充分必要条件、动态均衡条件等进行分析,确保多无人机构建的共生系统是可行的,符合共生理论的。对共生系统的建立各条件分析采用图7所示的方法进行共生系统相关原理分析,分析多无人系统协同中的微观动力过程及其与宏观性质的关系。构建完成的多无人系统协同共生现象采用图8所示方法,分析共生单元的质参兼容、共生模式、共生利益、与环境的关系、共生相变和进化方向,以及共生系
统稳定分析等。采用的分析原理如图9所示,从共生度、共生界面和共生模式等角度进行分析。该多无人系统同样朝着一体化互惠共生发展,朝着察打一体化的方向发展。
[0131]
图11所示的空天海一体化协同共生系统,共生单元包括太空中的卫星1201、天空中的无人机1202、水面的无人艇1203和水下的无人潜航器1204。共生环境为空天海总环境1200。在此共生环境内存在多种共生模式,因卫星1201并不能从此共生中获得共生利益,因此卫星1201与其他共生单元之间是连续性的偏利共生,其他无人机系统持续获得卫星信号实现定位和通信,形成共生界面。因无人机与无人艇之存在持续的信息交互,并协同完成对水面空中目标的侦查打击等任务,所以无人机1202与无人艇1203之间的共生模式可以是连续性的非对称互惠共生。同理,水面无人艇1203与水下无人潜航器1204之间的协同共生为间歇性共生。图12中无人舰载直升机1205,无人舰载直升机1201与无人艇1203之间的共生模式也是存在共生相变的,如当无人舰载直升机1201不执行任务停靠在无人艇1203上,则无人舰载直升机1201与无人艇1203之间是偏利共生模式,当无人舰载直升机1201起飞执行任务时,与无人艇1203之间的共生模式为互惠的连续性共生,且无人舰载直升机1201与空中无人机1202、水下无人潜航器1204协同完成反潜任务时的共生模式为互惠共生。整个共生系统朝着一体化互惠共生方向发展,形成不可分割的部分,如进化成一种未来武器,能自主完成定位导航,既能在太空中飞行也能在空中水面、水下航行,如空天飞机、两栖飞机等都是这种进化的中间状态。这种进化受限于各共生单元的自身的进化,如结构设计、材料、传感器、计算机等技术的发展,同时也受其他共生单元的进化水平限制。
[0132]
此外,对应于上述提供的基于生物共生的多无人系统协同方法,本发明还提供了一种基于生物共生的多无人系统协同系统,如图12所示,该协同系统包括:第一获取模块1、共生单元确定模块2、第二获取模块3、共生模式确定模块4、共生界面生成模块5和种类-数量-维度确定模块6。
[0133]
其中,第一获取模块1用于获取目标任务以及共生环境。共生环境包括完成目标任务时所处的外界环境和完成目标任务时的电磁环境。
[0134]
共生单元确定模块2用于根据目标任务类型确定完成候选无人系统共生单元。
[0135]
第二获取模块3用于获取候选无人系统共生单元的质参量。质参量包括:无人系统共生单元的组织结构、功能性质和行为方式。
[0136]
共生模式确定模块4用于根据质参量确定完成目标任务的无人系统共生单元,并确定各无人系统共生单元间的共生模式。共生模式包括:组织共生模式和行为共生模式。组织共生模式包括:点共生、间歇共生、连续共生和一体化共生。行为共生模式包括:寄生、偏利共生、非对称互惠共生和对称性互惠共生。
[0137]
共生界面生成模块5用于根据共生模式生成共生界面。共生界面包括多无人机系统共生单元之间的接触方式和交互机制。
[0138]
种类-数量-维度确定模块6用于根据共生界面和共生环境确定各无人系统共生单元的种类、数量和任务维度。
[0139]
作为本发明的一优选实施方式,上述协同系统还包括:第三获取模块和联系确定模块。
[0140]
其中,第三获取模块用于获取分析判据。分析判据包括:各无人系统共生单元间的质参量兼容度、共生模式、共生利益和相变类型。
[0141]
联系确定模块用于根据分析判据确定各无人系统共生单元之间以及无人系统共生单元与共生环境间的联系。
[0142]
作为本发明的另一优选实施方式,上述种类-数量-维度确定模块6具体包括:共生度获取单元和种类-数量-维度确定单元。
[0143]
其中,共生度获取单元用于获取各无人系统共生单元间的共生度。共生度为各无人系统共生单元间质参量相互关联的影响程度
[0144]
种类-数量-维度确定单元用于采用共生度、共生界面和共生模式确定各无人系统共生单元的种类、数量和任务维度。
[0145]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0146]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1