一种基于无线传感器自动采集监测装置及系统的制作方法
[0001]
本发明涉及网络监测技术领域,具体为一种基于无线传感器自动采集监测装置及系统。
背景技术:
[0002]
随着科技不断的发展,在电力方面也逐渐提高,电力是以电能作为动力的能源,电力既是是当今的互联网时代我们仍然对电力有着持续增长的需求,因为我们发明了电脑、家电等更多使用电力的产品,不可否认新技术的不断出现使得电力成为人们的必需品,电力行业企业信息化建设早,信息化系统(oa系统、eam系统、sis系统等)应用相当成熟,涉及生产,运行,维护,销售等多个生产经营环节。
[0003]
但是目前设备在工作时,由于没有对设备起到很好的监测作用,使得设备能耗情况会有所提高,这样会浪费大量的电力,没有设置对设备的能耗进行监测分配装置。
技术实现要素:
[0004]
针对现有技术的不足,本发明提供了一种基于无线传感器自动采集监测装置及系统,解决了目前设备在工作时,由于没有对设备起到很好的监测作用,使得设备能耗情况会有所提高,这样会浪费大量的电力的问题。
[0005]
为实现以上目的,本发明通过以下技术方案予以实现:一种基于无线传感器自动采集监测装置,包括机体,所述机体的后表面对称设置有两个凸块,两个所述凸块之间设置有紧固件。
[0006]
所述紧固件包括有l形座,所述l形座的前表面设置有腔体块,所述腔体块的内部中间位置处水平连接有限位轴,所述限位轴的两端外表面均套接滑动安装有滑板,且限位轴的两端外表面均套接滑动安装有弹簧,所述滑板的另一侧面中间位置处固定连接有滑套,所述滑套是套接滑动安装于限位轴的外表面,所述滑板的两端侧面均水平连接有定位轴,所述限位轴的上表面中间位置处对称贯穿安装有两个限位杆,两个所述限位杆的上下端分别与腔体块的内部上下表面固定连接,且两个所述限位杆的外表面之间位于限位轴的上下方位置处均套接滑动安装有滑块,所述滑块的两端与两个滑套的一端之间均转动连接有调节杆,且滑块的前表面中间位置处开设有滑动槽,所述腔体块的内部前表面对称转动连接有两个蜗轮盘,两个所述蜗轮盘的一侧前表面均固定连接有凸轴。
[0007]
优选的,所述蜗轮盘上的凸轴是贯穿滑动安装于滑动槽的内部,所述弹簧的两端分别与滑板的一侧面和腔体块的内部一侧面固定连接。
[0008]
优选的,所述l形座的上表面嵌入转动安装有把手,所述把手的下端垂直连接有蜗杆,所述蜗杆的下端与腔体块的内部下表面转动连接,且蜗杆与两个蜗轮盘之间为啮接,所述蜗杆两端外表面的蜗齿设置为相反。
[0009]
优选的,所述l形座是卡接于两个凸块之间,两个所述凸块相对的一面均对称开设有两个与定位轴相对应的定位槽,所述弹簧处于原长时,所述定位轴的一端是滑动嵌入安
装于定位槽的内部。
[0010]
优选的,一种基于无线传感器自动采集监测系统,所述机体包括有云计算单元和中央处理器,所述中央处理器和云计算单元之间通过导线实现双向连接,所述中央处理器和数据采集模块之间通过通信模块进行传输连接,所述数据采集模块的输入端通过导线与供电单元的输出端电性连接,所述供电单元的输入端通过导线与电源管理模块的输出端电性连接,所述电源管理模块的输入端通过导线与中央处理器的输出端电性连接。
[0011]
优选的,所述供电单元包括有电源模块和传感模块,所述传感模块包括有导线温度传感器和微风振动传感器、线夹测温传感器、弧垂测温传感器、污秽传感器、防外破传感器、拉力传感器、导线舞动传感器、倾角传感器、电压传感器以及电流传感器。
[0012]
优选的,所述云计算单元包括有显示模块,所述显示模块的输出端通过导线与能耗计算模块的输入端电性连接,所述能耗计算模块的输出端通过导线与数据分析模块的输入端电性连接,所述数据分析模块的输出端通过导线与分配计算模块的输入端电性连接,所述显示模块的输入端通过导线与数据对比模块的输出端电性连接,所述数据对比模块的输入端通过导线与数据库的输出端电性连接,所述显示模块的输入端通过导线与时间模块的输出端电性连接。
[0013]
优选的,所述电源管理模块包括有数据整理模块,所述数据整理模块的输出端通过导线与路径选择模块的输入端电性连接,所述路径选择模块的输出端通过导线与充放电管理模块的输入端电性连接。
[0014]
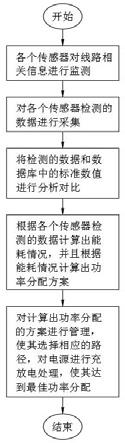
优选的,一种基于无线传感器自动采集监测系统,其监测的方法包括以下步骤:s1、数据监测:首先传感模块中的各个传感器对电源模块的线路信息情况进行监测,监测时,数据采集模块对监测的数据进行采集,采集完毕后,通过通信模块将信息传递给中央处理器;s2、功率方案计算:中央处理器将采集的信息传递给云计算单元,先在云计算单元中输入线路信息各种标准数值,输入后,数据对比模块将监测的数据与标准数值进行对比,对比后,使对比结果在显示模块中显示出来,接着能耗计算模块根据这些数据计算出设备实际能耗情况和采用标准数值后能耗情况,计算完毕后,将数据分析模块对计算的数据进行分析,分析后,分配计算模块根据各个传感器和通信模块的信号强度、距离以及工作模式计算出最佳功率分配,将分配的设备能耗数值接近采用标准数值后能耗数值,使其总功率值最低;s3、路径分配:数据整理模块对计算出最佳功率数据进行整理,整理后,路径选择模块将这些功率数据分配给各个相应的线路设备,之后充放电管理模块可以对连接各个线路的电源进行充放电处理,从而使其达到最佳功率。
[0015]
优选的,所述步骤s2中,能耗算法公式为q=u*i*h,其中q为用电量千瓦时,u为电源电压,i为设备运行电流,h为通电运行时间。
[0016]
有益效果本发明提供了一种基于无线传感器自动采集监测装置及系统,与现有技术相比具备以下有益效果:(1)、该基于无线传感器自动采集监测装置及系统,通过中央处理器和云计算单元之间通过导线实现双向连接,中央处理器和数据采集模块之间通过通信模块进行传输连接,数
据采集模块的输入端通过导线与供电单元的输出端电性连接,供电单元的输入端通过导线与电源管理模块的输出端电性连接,电源管理模块的输入端通过导线与中央处理器的输出端电性连接,电源和各个传感器的能耗需求,对接入的各个传感器和通信模块进行计算,让电源管理模块进行更高效的转换,然后对其进行自动配置,达到最佳的功率资源配置,节省电资源,降低经济成本。
[0017]
(2)、该基于无线传感器自动采集监测装置及系统,通过设置紧固件,利用弹簧的弹性,用户转动把手,能够带动滑板上定位轴移动,使其脱离或插入到凸块上的定位槽中,从而方便对机体进行拆卸或安装,代替了传统的螺栓固定的方式,该装置结构设计合理,操作方便快捷,节省了机体拆装的时间。
附图说明
[0018]
图1为本发明结构的立体图;图2为本发明紧固件结构的示意图;图3为本发明腔体块结构的内部示意图;图4为本发明的原理框架图;图5为本发明的传感模块的原理框架图;图6为本发明的云计算单元的原理框架图;图7为本发明的电源管理单元的原理框架图;图8为本发明的监测原理流程图。
[0019]
图中:1、机体;11、中央处理器;12、云计算单元;121、显示模块;122、能耗计算模块;123、数据分析模块;124、分配计算模块;125、数据对比模块;126、数据库;127、时间模块;2、凸块;21、定位槽;3、紧固件;31、l形座;32、腔体块;321、把手;322、蜗杆;33、限位轴;34、滑板;35、弹簧;36、滑套;37、定位轴;38、限位杆;39、滑块;310、调节杆;311、滑动槽;312、蜗轮盘;313、凸轴;4、数据采集模块;5、通信模块;6、供电单元;61、电源模块;62、传感模块;621、导线温度传感器;622、微风振动传感器;623、线夹测温传感器;624、弧垂测温传感器;625、污秽传感器;626、防外破传感器;627、拉力传感器;628、导线舞动传感器;629、倾角传感器;6210、电压传感器;6211、电流传感器;7、电源管理模块;71、数据整理模块;72、路径选择模块;73、充放电管理模块。
具体实施方式
[0020]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0021]
请参阅图1,本发明提供一种技术方案:一种基于无线传感器自动采集监测装置,包括机体1,机体1的后表面对称设置有两个凸块2,两个凸块2之间设置有紧固件3。
[0022]
请参阅图2-3,本发明实施例中,紧固件3包括有l形座31,l形座31的前表面设置有腔体块32,腔体块32的内部中间位置处水平连接有限位轴33,限位轴33的两端外表面均套接滑动安装有滑板34,且限位轴33的两端外表面均套接滑动安装有弹簧35,滑板34的另一
侧面中间位置处固定连接有滑套36,滑套36是套接滑动安装于限位轴33的外表面,滑板34的两端侧面均水平连接有定位轴37,限位轴33的上表面中间位置处对称贯穿安装有两个限位杆38,两个限位杆38的上下端分别与腔体块32的内部上下表面固定连接,且两个限位杆38的外表面之间位于限位轴33的上下方位置处均套接滑动安装有滑块39,滑块39的两端与两个滑套36的一端之间均转动连接有调节杆310,且滑块39的前表面中间位置处开设有滑动槽311,腔体块32的内部前表面对称转动连接有两个蜗轮盘312,两个蜗轮盘312的一侧前表面均固定连接有凸轴313,蜗轮盘312上的凸轴313是贯穿滑动安装于滑动槽311的内部,弹簧35的两端分别与滑板34的一侧面和腔体块32的内部一侧面固定连接,l形座31的上表面嵌入转动安装有把手321,把手321的下端垂直连接有蜗杆322,蜗杆322的下端与腔体块32的内部下表面转动连接,且蜗杆322与两个蜗轮盘312之间为啮接,蜗杆322两端外表面的蜗齿设置为相反,转动把手321,为了能够带动两个蜗轮盘312转动,并且使其转动的方向相反,l形座31是卡接于两个凸块2之间,两个凸块2相对的一面均对称开设有两个与定位轴37相对应的定位槽21,弹簧35处于原长时,定位轴37的一端是滑动嵌入安装于定位槽21的内部,为了将机体1给固定住。
[0023]
进一步的,请参阅图4,本发明实施例中,一种基于无线传感器自动采集监测系统,机体1包括有云计算单元12和中央处理器11,中央处理器11和云计算单元12之间通过导线实现双向连接,中央处理器11和数据采集模块4之间通过通信模块5进行传输连接,数据采集模块4的输入端通过导线与供电单元6的输出端电性连接,供电单元6的输入端通过导线与电源管理模块7的输出端电性连接,电源管理模块7的输入端通过导线与中央处理器11的输出端电性连接。
[0024]
进一步的,请参阅图5,本发明实施例中,供电单元6包括有电源模块61和传感模块62,传感模块62包括有导线温度传感器621和微风振动传感器622、线夹测温传感器623、弧垂测温传感器624、污秽传感器625、防外破传感器626、拉力传感器627、导线舞动传感器628、倾角传感器629、电压传感器6210以及电流传感器6211,导线温度传感器621能够监测线路的温度,微风振动传感器622能够监测线路振动情况,线夹测温传感器623能够监测线夹下的温度,弧垂测温传感器624能够监测电路弧垂状态下的温度,污秽传感器625能够监测线路表面的污秽,防外破传感器626能够监测线路是否发生破损,拉力传感器627能够检测线路受到拉力情况,导线舞动传感器628能够监测线路舞动的情况,倾角传感器629能够监测线路的倾角情况,电压传感器6210能够监测线路电压数值,电流传感器6211能够监测线路电流数值。
[0025]
进一步的,请参阅图6,本发明实施例中,云计算单元12包括有显示模块121,显示模块121的输出端通过导线与能耗计算模块122的输入端电性连接,能耗计算模块122的输出端通过导线与数据分析模块123的输入端电性连接,数据分析模块123的输出端通过导线与分配计算模块124的输入端电性连接,显示模块121的输入端通过导线与数据对比模块125的输出端电性连接,数据对比模块125的输入端通过导线与数据库126的输出端电性连接,显示模块121的输入端通过导线与时间模块127的输出端电性连接。
[0026]
进一步的,请参阅图7,本发明实施例中,电源管理模块7包括有数据整理模块71,数据整理模块71的输出端通过导线与路径选择模块72的输入端电性连接,路径选择模块72的输出端通过导线与充放电管理模块73的输入端电性连接。
[0027]
进一步的,请参阅图8,本发明实施例中,一种基于无线传感器自动采集监测系统,其监测的方法包括以下步骤:s1、数据监测:首先传感模块62中的各个传感器对电源模块61的线路信息情况进行监测,监测时,数据采集模块4对监测的数据进行采集,采集完毕后,通过通信模块5将信息传递给中央处理器11;s2、功率方案计算:中央处理器11将采集的信息传递给云计算单元12,先在云计算单元12中输入线路信息各种标准数值,输入后,数据对比模块125将监测的数据与标准数值进行对比,对比后,使对比结果在显示模块121中显示出来,接着能耗计算模块122根据这些数据计算出设备实际能耗情况和采用标准数值后能耗情况,计算完毕后,将数据分析模块123对计算的数据进行分析,分析后,分配计算模块124根据各个传感器和通信模块5的信号强度、距离以及工作模式计算出最佳功率分配,将分配的设备能耗数值接近采用标准数值后能耗数值,使其总功率值最低;s3、路径分配:数据整理模块71对计算出最佳功率数据进行整理,整理后,路径选择模块72将这些功率数据分配给各个相应的线路设备,之后充放电管理模块73可以对连接各个线路的电源进行充放电处理,从而使其达到最佳功率。
[0028]
进一步的,步骤s2中,能耗算法公式为q=u*i*h,其中q为用电量千瓦时,u为电源电压,i为设备运行电流,h为通电运行时间。
[0029]
同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
[0030]
使用时,转动把手321,使其带动蜗杆322转动,蜗杆322带动与其啮接的两个蜗轮盘312转动,由于蜗杆322两端外表面的蜗齿设置为相反,因此蜗杆322转动时会使两个蜗轮盘312转动的方向相反,两个蜗轮盘312转动时带动凸轴313做偏心运动,凸轴313会在滑块39上的滑动槽311中滑动,凸轴313滑动时会对滑块39进行挤压,使两个滑块39在限位杆38上滑动,当需要对机体1进行拆卸时,使两个滑块39往两边滑动,在弹簧35的弹性下,滑块39两端的调节杆310会带动滑套36上的滑板34在限位轴33上滑动,滑板34带动定位轴37移动,使定位轴37的一端离开凸块2上的定位槽21中,之后将机体1拿掉即可,需要对机体1进行安装时,使机体1上的两个凸块2将腔体块32给卡住,并且使定位轴37和凸块2上的定位槽21对齐,对齐后,松开把手321,弹簧35就会使两个滑块39往初始位置移动,滑板34会回到初始位置,这时定位轴37的一端会插入到凸块2上的定位槽21中,即可将机体1给固定住,完成安装工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1