一种核电厂闭环控制系统最优PID参数的设计方法与流程
一种核电厂闭环控制系统最优pid参数的设计方法
技术领域
1.本发明属于核工业智能算法应用技术领域,具体涉及一种核电厂闭环控制系统最优pid参数的设计方法。
背景技术:
2.随着中国核电技术的发展,对核电运行安全性和可靠性的要求逐步提高,对核电厂的过程控制自动化程度也提出了更高的要求,这一要求既包括控制的安全可靠性、稳定性,同时还包括了控制结果的准确性。核电厂系统中存在众多闭环控制系统,采用闭环pid控制方式,保障核电厂相关系统自动安全稳定运行。
3.在以往项目设计中,设置核电厂闭环控制系统pid控制器的pid参数(比例p、积分i、微分d)基本依靠经验数据(pid控制器是通过设置pid比例、积分、微分参数来实现控制功能的),而经验数据主要来自法国参考电站。而针对我们自主设计的华龙一号堆型核电厂,闭环控制系统的pid参数设置,是设计过程非常重要的环节,如果没有一定的理论基础和计算依据,在核电厂调试运行时pid参数进行调试整定,就增加了现场人员的工作量和系统运行不稳定性的风险。
4.随着核电技术的发展,每个核电项目均搭建了核电厂设计验证平台,该平台采用机理建模的方法构建了核电厂的全范围工程仿真机。该平台通过工作站和服务器中配置的核电厂仪控系统真实逻辑,设计验证发出的命令可以像真实核电厂的自动化系统一样在服务器中进行自动处理、向设备发出指令并给出反馈,以验证仪控系统的功能。
技术实现要素:
5.本发明的目的是从目前核电技术水平现状出发,利用核电厂设计验证平台模拟数据,提出一种基于遗传算法的核电厂闭环控制系统最优pid参数的设计方法,以便正确地获取适用于核电厂的最优化pid控制参数,保障核电闭环控制系统最优化控制。
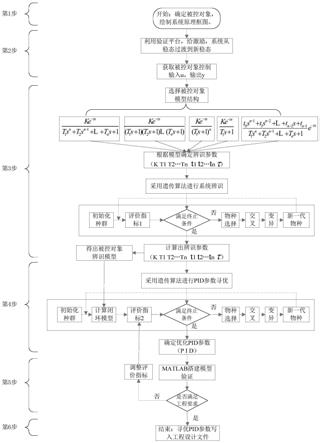
6.为实现以上目的,本发明的技术方案是提供一种核电厂闭环控制系统最优pid参数的设计方法,用于得到满足工程指标要求的闭环控制系统的最优pid参数,包括如下步骤:
7.步骤s1,确定需要优化pid参数的闭环控制系统,绘制出所述闭环控制系统的闭环控制系统框图,确定被控对象;
8.步骤s2,在核电厂设计验证平台进行核电厂仿真模拟,运行所述闭环控制系统;
9.步骤s3,确定被控对象模型结构和模型参数,利用遗传算法对所述被控对象进行辨识,得出最优化辨识的所述模型参数,获取最终的被控对象模型;
10.步骤s4,利用所述遗传算法进行pid参数寻优,得出最优化pid参数;
11.步骤s5,利用数学软件将所述被控对象模型和所述最优化pid参数代入所述闭环控制系统框图进行模拟,直到所述最优化pid参数满足所述闭环控制系统稳定运行的工程指标要求;
12.步骤s6,将满足所述闭环控制系统稳定运行的工程指标要求的所述最优化pid参数写到工程设计文件中。
13.进一步,在所述步骤s1中,确定需要优化pid参数的闭环控制系统,并根据工艺运行条件绘制出所述闭环控制系统框图,确定被控对象,明确被控对象控制输入u和系统响应输出y,所述闭环控制系统框图包括pid控制器和执行机构和被控对象1,所述pid控制器和所述执行机构和所述被控对象1组成了闭环结构模型。
14.进一步,在所述步骤s2中,在核电厂设计验证平台进行核电厂仿真模拟运行所述闭环控制系统,当所述闭环控制系统处于稳态运行阶段,激发激励信号,所述激励信号能够在被控对象控制输入端激发,也能够通过改变所述闭环控制系统的定值方式激发,还能够利用外界扰动进行信号激发;所述激励信号触发后,所述闭环控制系统从初始稳态逐渐过渡到新稳态,记录下所述被控对象控制输入u和所述系统响应输出y过程变化值。
15.进一步,在所述步骤s3中,根据所述被控对象的机理特性和所述系统响应输出y形态确定被控对象模型结构,根据所述被控对象模型结构确定需要辨识的所述模型参数,利用遗传算法对所述被控对象进行辨识;当辨识结果满足评价指标1则得出最优化辨识的所述模型参数;所述评价指标1是指被控对象系统响应输出与辨识系统响应输出偏差最小,所述被控对象系统响应输出和所述辨识系统响应输出中的输出是指在输入信号对被控对象系统或辨识系统进行激励而产生的输出信号,所述输出信号随时间变化为一条输出曲线。
16.进一步,
17.在所述步骤s3中,所述被控对象模型结构包括如下几种:
18.展开式形式
19.零极点形式
20.多容惯性环节
21.一阶系统加纯迟
22.其他形式
23.g(s)是被控对象模型传递函数
24.k是比例系数
25.t1…
n
是时间系数
26.e
‑
τs
是延时环节
27.n是传递函数阶次
28.根据所述被控对象模型结构确定需要辨识的所述模型参数(k t
1 t2…
t
n t
1 t2…
t
n
τ),利用所述遗传算法对所述被控对象进行辨识;通过公式(6)确定所述遗传算法的所述评价指标1:将被控对象响应输出序列y(k)与辨识模型响应输出序列y
*
(k)的误差平方和作为目标函数q,使所述目标函数q达到全局最小;目标函数选取确定适应度函数为q
min
;
[0029][0030]
y(k)是所述核电厂设计验证平台获取的被控对象输出序列;
[0031]
y
*
(k)是所述遗传算法辨识出的被控对象输出序列;
[0032]
c1是一个常系数,以保证q
min
非负;
[0033]
是目标函数,保证辨识结果误差最小;
[0034]
cov(abs(y(k)
‑
y
*
(k))是抑制噪声,保证噪声方差最小。
[0035]
a1、b1是为提高辨识精度的误差放大倍数,通过改变a1、b1,使辨识结果快速达到全局最小值;
[0036]
设置交叉因子0.4
‑
0.9之间,变异因子0.01
‑
0.1之间,种群大小取30
‑
60,当所述适应度函数q
min
最小时,说明所述遗传算法获取的所述模型参数(k t
1 t2…
t
n t
1 t2…
t
n
τ)最优;将辨识出的最优的所述模型参数(k t
1 t2…
t
n t
1 t2…
t
n
τ)代入对应的所述被控对象模型结构,即获取最终的所述被控对象模型,所述被控对象模型包括所述被控对象模型结构。
[0037]
进一步,在所述步骤s4中,通过pid寻优程序利用所述遗传算法进行pid参数寻优,将所述遗传算法寻找的所述pid参数与所述被控对象辨识的所述被控对象模型结构相结合,计算出闭环控制系统模型;所述pid寻优程序自动给所述闭环控制系统激发阶跃响应;当所述闭环控制系统的输出曲线满足评价指标2,则得出最优化pid参数;所述评价指标2是指所述闭环控制系统的响应输出曲线品质的控制指标。
[0038]
进一步,
[0039]
在所述步骤s4中,利用所述遗传算法进行pid参数寻优时,首先利用信号流程的基本简化法则,将所述闭环控制系统简化为输入为r、输出为y的开环系统,所述r为闭环定值输入量,所述y为所述系统响应输出y;对所述r进行单位阶跃,对所述闭环控制系统的阶跃响应输出曲线y进行所述指标评价2:将闭环定值阶跃输入序列u(k)与闭环计算模型阶跃响应输出序列y
*
(k)的误差平方和作为目标函数j,当所述阶跃响应输出曲线y不满足品质要求时对所述目标函数j施加惩罚因子j'进行惩罚,最终使所述目标函数j达到全局最小;目标函数选取确定适应度函数为j
min
;所述阶跃响应输出曲线y是由所述系统响应输出y随着时间变化会呈现得到;
[0040][0041]
u(k)是闭环定值阶跃输入序列;
[0042]
y
*
(k)是闭环计算模型阶跃响应输出序列;
[0043]
c1是一个常系数,以保证q
min
非负;
[0044]
是目标函数,保证辨识结果误差最小;
[0045]
cov(abs(u(k)
‑
y
*
(k))是抑制噪声,保证噪声方差最小;
[0046]
a2、b2是为提高辨识精度的误差放大倍数,通过改变a2、b2,使寻优结果快速达到全局最小值;
[0047]
j'是惩罚因子,对不满足工程品质指标的所述阶跃响应输出曲线y进行惩罚;
[0048]
所述阶跃响应输出曲线y应满足以下如公式(8)的品质指标要求;
[0049][0050]
m
p
为所述阶跃响应输出曲线y的超调量,
[0051]
φ为所述阶跃响应输出曲线y的衰减率,
[0052]
u
pid
为pid控制器输出能力,
[0053]
t
s
‑
pid
为pid控制器变化100%开度的平均时间;
[0054]
所述惩罚因子j'可以根据工程需求进行调整变更;
[0055]
当所述适应度函数j
min
最小时,说明所述遗传算法获取的所述pid参数为最优pid参数,将所述最优pid参数代入所述闭环控制系统框图中的所述pid控制器中,即获取最终的闭环结构模型。
[0056]
进一步,在所述步骤s5中,利用数学软件进行仿真验证,搭建所述闭环控制系统框图,将所述被控对象模型和所述最优化pid参数代入所述闭环控制系统框图进行模拟,如所述闭环控制系统的阶跃响应输出曲线特性不满足工程指标要求,可根据工程需求对所述评价指标2进行调整,调整后再次利用所述遗传算法进行pid参数寻优,直到所述最优化pid参数满足所述闭环控制系统稳定运行的工程指标要求。
[0057]
本发明的有益效果在于:
[0058]
1.本发明提出的设计方法计算出的pid参数可以直接应用于核电站闭环控制系统调试和运行,同时解决了核电厂设计文件中pid参数的可用性问题,提供了有效的理论计算依据。
[0059]
2.本发明提出的设计方法,利用核电厂设计验证平台模拟数据不但获取了核电站被控对象的模型参数,并对闭环控制系统的pid参数进行了优化设计,提高了pid参数可用性,降低了现场人员的调试工作量和系统运行不稳定性风险。
[0060]
3.该专利的发明不仅可用于标准闭环控制系统的pid参数的寻优,还可对串级双闭环控制、加前馈的闭环控制等其他类型的闭环系统进行pid参数的寻优,另外辨识数据可不局限于核电厂设计验证平台的模拟数据。
附图说明
[0061]
图1是本发明具体实施方式中所述的一种核电厂闭环控制系统最优pid参数的设计方法的流程图;
[0062]
图2是本发明具体实施方式中所述的标准闭环控制系统框图的示意图。
具体实施方式
[0063]
下面结合附图和实施例对本发明作进一步描述。
[0064]
如图1所示,本发明提供的一种核电厂闭环控制系统最优pid参数的设计方法,用于得到满足工程指标要求的闭环控制系统的最优pid参数,包括如下步骤:
[0065]
步骤s1,确定需要优化pid参数的闭环控制系统,绘制出闭环控制系统的闭环控制系统框图(即系统原理框图),确定被控对象;
[0066]
步骤s2,在核电厂设计验证平台进行核电厂仿真模拟,运行闭环控制系统;
[0067]
步骤s3,确定被控对象模型结构和模型参数,利用遗传算法对被控对象进行辨识,得出最优化辨识的模型参数,获取最终的被控对象模型;
[0068]
步骤s4,利用遗传算法进行pid参数寻优,得出最优化pid参数;
[0069]
步骤s5,利用数学软件将被控对象模型和最优化pid参数代入闭环控制系统框图进行模拟,直到最优化pid参数满足闭环控制系统稳定运行的工程指标要求;
[0070]
步骤s6,将满足闭环控制系统稳定运行的工程指标要求的最优化pid参数写到工程设计文件中。
[0071]
在步骤s1中,确定需要优化pid参数的闭环控制系统,并根据工艺运行条件绘制出闭环控制系统框图,确定被控对象,明确被控对象控制输入u和系统响应输出y,闭环控制系统框图包括pid控制器和执行机构和被控对象1,pid控制器和执行机构和被控对象1组成了闭环结构模型。
[0072]
在步骤s2中,在核电厂设计验证平台进行核电厂仿真模拟运行闭环控制系统,当闭环控制系统处于稳态运行阶段,激发激励信号,激励信号能够在被控对象控制输入端激发,也能够通过改变闭环控制系统的定值方式激发,还能够利用外界扰动进行信号激发;激励信号触发后,闭环控制系统从初始稳态逐渐过渡到新稳态,记录下被控对象控制输入u和系统响应输出y过程变化值。
[0073]
在步骤s3中,根据被控对象的机理特性和系统响应输出y形态确定被控对象模型结构,根据被控对象模型结构确定需要辨识的模型参数,利用遗传算法对被控对象进行辨识;当辨识结果满足评价指标1则得出最优化辨识的模型参数;评价指标1是指被控对象系统响应输出与辨识系统响应输出偏差最小,被控对象系统响应输出和辨识系统响应输出中的输出是指在输入信号对被控对象系统或辨识系统进行激励而产生的输出信号,输出信号随时间变化为一条输出曲线。
[0074]
在步骤s3中,被控对象模型结构包括如下几种:
[0075]
展开式形式
[0076]
零极点形式
[0077]
多容惯性环节
[0078]
一阶系统加纯迟
[0079]
其他形式
[0080]
g(s)是被控对象模型传递函数
[0081]
k是比例系数
[0082]
t1…
n
是时间系数
[0083]
e
‑
τs
是延时环节
[0084]
n是传递函数阶次
[0085]
根据被控对象模型结构确定需要辨识的模型参数(也就是辨识参数,包括k t
1 t2…
t
n t
1 t2…
t
n
τ),利用遗传算法对被控对象进行辨识;通过公式(6)确定遗传算法的评价指标1:将被控对象响应输出序列y(k)与辨识模型响应输出序列y
*
(k)的误差平方和作为目标函数q,使目标函数q达到全局最小;目标函数选取确定适应度函数为q
min
;
[0086][0087]
y(k)是核电厂设计验证平台获取的被控对象输出序列;
[0088]
y
*
(k)是遗传算法辨识出的被控对象输出序列;
[0089]
c1是一个常系数,以保证q
min
非负;
[0090]
是目标函数,保证辨识结果误差最小;
[0091]
cov(abs(y(k)
‑
y
*
(k))是抑制噪声,保证噪声方差最小。
[0092]
a1、b1是为提高辨识精度的误差放大倍数,通过改变a1、b1,使辨识结果快速达到全局最小值;
[0093]
设置交叉因子0.4
‑
0.9之间,变异因子0.01
‑
0.1之间,种群大小取30
‑
60,当适应度函数q
min
最小时,说明遗传算法获取的模型参数(k t
1 t2…
t
n t
1 t2…
t
n
τ)最优;将辨识出的最优的模型参数(k t
1 t2…
t
n t
1 t2…
t
n
τ)代入对应的被控对象模型结构,即获取最终的被控对象模型,被控对象模型包括被控对象模型结构。
[0094]
在步骤s4中,通过pid寻优程序利用遗传算法进行pid参数寻优,将遗传算法寻找的pid参数与被控对象辨识的被控对象模型结构相结合,计算出闭环控制系统模型;pid寻优程序自动给闭环控制系统激发阶跃响应;当闭环控制系统的输出曲线满足评价指标2,则得出最优化pid参数;评价指标2是指闭环控制系统的响应输出曲线品质的控制指标(pid寻优程序是为pid寻优编写的程序)。
[0095]
在步骤s4中,利用遗传算法进行pid参数寻优时,首先利用信号流程的基本简化法则,将闭环控制系统简化为输入为r、输出为y的开环系统,r为闭环定值输入量,y为系统响应输出y;对r进行单位阶跃,对闭环控制系统的阶跃响应输出曲线y进行指标评价2:将闭环定值阶跃输入序列u(k)与闭环计算模型阶跃响应输出序列y
*
(k)的误差平方和作为目标函数j,当阶跃响应输出曲线y不满足品质要求时对目标函数j施加惩罚因子j'进行惩罚,最终使目标函数j达到全局最小;目标函数选取确定适应度函数为j
min
;阶跃响应输出曲线y是由系统响应输出y随着时间变化会呈现得到(即阶跃响应输出曲线y就是由系统响应输出y的输出信号随时间变化得到的一条输出曲线);
[0096][0097]
u(k)是闭环定值阶跃输入序列;
[0098]
y
*
(k)是闭环计算模型阶跃响应输出序列;
[0099]
c1是一个常系数,以保证q
min
非负;
[0100]
是目标函数,保证辨识结果误差最小;
[0101]
cov(abs(u(k)
‑
y
*
(k))是抑制噪声,保证噪声方差最小;
[0102]
a2、b2是为提高辨识精度的误差放大倍数,通过改变a2、b2,使寻优结果快速达到全局最小值;
[0103]
j'是惩罚因子,对不满足工程品质指标的阶跃响应输出曲线y进行惩罚;
[0104]
阶跃响应输出曲线y应满足以下如公式(8)的品质指标要求;
[0105][0106]
m
p
为阶跃响应输出曲线y的超调量,
[0107]
φ为阶跃响应输出曲线y的衰减率,
[0108]
u
pid
为pid控制器输出能力,
[0109]
t
s
‑
pid
为pid控制器变化100%开度的平均时间;
[0110]
惩罚因子j'可以根据工程需求进行调整变更;
[0111]
当适应度函数j
min
最小时,说明遗传算法获取的pid参数为最优pid参数,将最优pid参数代入闭环控制系统框图中的pid控制器(图2中pid控制器的数学模型)中,即获取最终的闭环结构模型(图2中pid控制器、执行机构、被控对象1组成了闭环结构模型)。
[0112]
在步骤s5中,利用数学软件(matlab)进行仿真验证,搭建闭环控制系统框图,将被控对象模型和最优化pid参数代入闭环控制系统框图进行模拟,如闭环控制系统的阶跃响应输出曲线特性不满足工程指标要求,可根据工程需求对评价指标2进行调整,调整后再次利用遗传算法进行pid参数寻优,直到最优化pid参数满足闭环控制系统稳定运行的工程指标要求。
[0113]
最后,在步骤s 6中,上述步骤完成后,即可最终将寻优的最优pid参数写到工程设计文件中,该参数经过了仿真论证,可用直接应用于核电站调试和运行。
[0114]
本发明所述的方法并不限于具体实施方式中所述的实施例,本领域技术人员根据本发明的技术方案得出其他的实施方式,同样属于本发明的技术创新范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1