一种超声波辅助的无人机自主平稳降落系统及方法与流程
1.本发明涉及无人机领域,尤其是涉及一种超声波辅助的无人机自主平稳降落系统及方法。
背景技术:
2.近年来,微机电系统、导航、软件平台等技术的不断成熟,为无人机技术的迅速发展提供了强有力的条件。无人机因具有体积小、重量轻、成本低、机动性好等特点已被广泛应用于航拍摄影、交通运输、农业植保以及安防等诸多行业领域。
3.随着无人机的作业环境愈发复杂,人们对其各方面性能都提出了更高的要求,而自主降落作为实现无人机智能化作业的重要一环,受到科研人员的广泛关注。当下许多应用场景不仅要求无人机能够精准着陆,并且需要其降落过程足够平稳,尽可能降低着陆过程中可能遇到的各种风险。
4.为实现无人机自主降落,中国专利cn201910784380.5公开了一种无人机精准起降控制方法及系统,在降落平台中设置平台定位装置,提高无人机rtk定位装置的精度,并可提供降落平台的位置及航向信息,可靠性高。但是,该专利公开的控制方法和系统在实际使用时,只有当着陆位置是降落平台时才能保证无人机的精确定位着陆,适用范围小,无法实现无人机在任意着陆点自主降落;通过检测垂直反向加速度的方式判断无人机是否触地,容易发生误判,且rtk定位方式在竖直方向上定位精度不足,在降落过程中难以进行实时的速度调控以保证无人机的平稳降落。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种超声波辅助的无人机自主平稳降落系统及方法,不需要在着陆点布置定位标记,通过rtk定位方式在水平方向上精确定位,通过超声波测距装置在竖直方向上精度定位,实现了无人机的精准降落,灵活性高;且通过超声波测距装置实时测量无人机的离地高度并根据离地高度实时调节降落速度,实现了对无人机降落速度的精确控制。
6.本发明的目的可以通过以下技术方案来实现:
7.一种超声波辅助的无人机自主平稳降落系统,包括无人机和通信基站,所述无人机上搭载有飞行控制器、惯性测量装置、rtk定位装置和第一无线通信模块;
8.所述无人机上还搭载有超声波测距装置,所述飞行控制器分别与超声波测距装置、惯性测量装置和rtk定位装置连接,所述rtk定位装置与第一无线通信模块连接;
9.所述通信基站包括rtk定位基站和第二无线通信模块,所述rtk定位基站与第二无线通信模块连接;
10.所述飞行控制器用于调整无人机的飞行速度和飞行角度,所述超声波测距装置用于测量无人机的离地高度,所述惯性测量装置和rtk定位装置用于无人机的定位。
11.进一步的,所述惯性测量装置包括三轴加速度计、陀螺仪以及三轴磁力计。
12.进一步的,所述rtk定位装置通过第一无线通信模块发送无人机的原始定位信息,并根据第一无线通信模块接收的差分数据校正原始定位信息;所述rtk定位基站通过第二无线通信模块接收原始定位信息和发送计算得到的差分数据。
13.一种超声波辅助的无人机自主平稳降落方法,使用如上所述的无人机自主平稳降落系统,包括以下步骤:
14.s1:无人机进入降落模式,获取着陆点;
15.s2:无人机向着陆点飞行,通过惯性测量装置和rtk定位装置定位,当无人机飞行至着陆点正上方的预定位置p
target
后保持无人机的水平方向位置不变;
16.s3:无人机通过惯性测量装置和rtk定位装置定位,以速度v
constant
向下降落,直至离地高度为预设置的最大离地高度h;
17.s4:通过超声波测距装置测量无人机的实时离地高度h,飞行控制器根据实时离地高度h实时地调整无人机的降落速度v,v的调整公式具体为:
18.v=k*(h
‑
d
truth
)+v
crash
19.k=(v
constant
‑
v
crash
)/(h
‑
d
truth
)
20.其中,d
truth
表示无人机静置于地面时超声波测距装置测量的离地高度,v
crash
表示预设置的触地速度;
21.s5:根据无人机的实时离地高度h判断无人机是否触地,若无人机触地,则停止螺旋桨,否则,重复步骤s4。
22.进一步的,所述步骤s2中,如果无人机的实际位置p
truth
(x1,y1,z1)与预定位置p
target
(x2,y2,z2)之间满足以下关系,则认为无人机已经飞行至着陆点正上方的预定位置p
target
:
[0023][0024]
其中,p
threshold
为预设置的第一精度阈值。
[0025]
更进一步的,所述预设置的第一精度阈值为0.1m。
[0026]
进一步的,所述步骤s3中,预设置的最大离地高度h不超过超声波测距装置的量程范围且大于h
safe
,h
safe
表示无人机的安全降落高度:
[0027][0028]
其中,a表示无人机的最大降落加速度。
[0029]
进一步的,所述步骤s4中,预设置的触地速度为0.2m/s。
[0030]
进一步的,所述步骤s5中,如果无人机的实时离地高度h小于预设置的第二精度阈值d
threshold
,则认为无人机触地。
[0031]
更进一步的,所述预设置的第二精度阈值d
threshold
=d
truth
+δd,其中δd可依据实际情况设定,不应太大,否则无人机将过早判定为触地而停机,增加无人机着陆风险,0<δd<0.05m。
[0032]
与现有技术相比,本发明具有以下有益效果:
[0033]
(1)不需要在着陆点布置定位标记,通过rtk定位方式在水平方向上精确定位,通过超声波测距装置在竖直方向上精度定位,实现了无人机的精准降落,灵活性高;且通过超
声波测距装置实时测量无人机的离地高度并根据离地高度实时调节降落速度,实现了对无人机降落速度的精确控制。
[0034]
(2)通过超声波测距装置弥补了rtk定位方式在竖直方向上精度不足的问题,实现了无人机降落过程中的三维高精度定位与控制,定位精度更高。
[0035]
(3)根据实时离地高度调节无人机降落速度,使得无人机能以预设置的触地速度平稳降落,降低了无人机着陆时与地面撞击导致无人机受损的风险。
[0036]
(4)采用超声波测距装置进行触地检测,误判的可能性低,相比于检测垂直反向加速度的方式,可靠性更高。
附图说明
[0037]
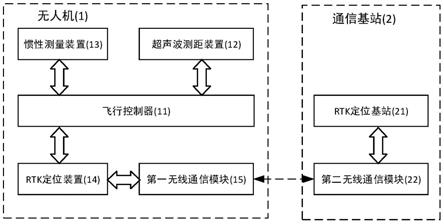
图1为无人机自主平稳降落系统的结构示意图;
[0038]
图2为实施例中无人机结构示意图;
[0039]
图3为实施例中无人机自主平稳降落方法的流程图;
[0040]
图4为实施例中无人机自主平稳降落过程中速度与离地高度的关系图;
[0041]
附图标记:1、无人机,11、飞行控制器,12、超声波测距装置,13、惯性测量装置,14、rtk定位装置,15、第一无线通信模块,2、通信基站,21、rtk定位基站,22、第二无线通信模块。
具体实施方式
[0042]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0043]
实施例1:
[0044]
一种超声波辅助的无人机自主平稳降落系统,整体结构如图1所示,包括无人机1和通信基站2,无人机1上搭载有飞行控制器11、超声波测距装置12、惯性测量装置13(inertial measurement unit,imu)、rtk定位装置14(real
‑
time kinematic)和第一无线通信模块15;通信基站2包括rtk定位基站21和第二无线通信模块22,rtk定位基站21与第二无线通信模块22连接。
[0045]
飞行控制器11分别与超声波测距装置12、惯性测量装置13和rtk定位装置14连接,rtk定位装置14与第一无线通信模块15连接。
[0046]
如图2所示,本实施例中,超声波测距装置12安装在无人机1的机身底部,方向竖直向下,用于测量无人机1降落过程中的离地高度,同时检测无人机1是否触地。飞行控制器11用于调整无人机1的飞行速度和飞行角度,惯性测量装置13内置三轴加速度计、陀螺仪以及三轴磁力计,用于测量无人机1的三轴加速度、姿态角信息。rtk定位装置14用于获取无人机1的精确位置、速度信息。
[0047]
具体的,rtk定位装置14通过第一无线通信模块15发送无人机1的原始定位信息至通信基站2;第二无线通信模块22接收原始定位信息并传输至rtk定位基站21,rtk定位基站21利用此原始定位信息计算出无人机1所在区域的差分数据,通过第二无线通信模块22将计算得到的差分数据发送至无人机1;第一无线通信模块15接收差分数据并将其传输至rtk
定位装置14,rtk定位装置14具有差分解算功能,利用接收到的差分数据对原始定位信息进行校正,从而获得高精度定位信息。
[0048]
此外,也可以利用信息融合技术,如卡尔曼滤波算法等,融合惯性测量装置13和rtk定位装置14的测量信息,充分发挥两者各自的优势,有效解决惯性测量装置13长时间工作产生累积误差以及rtk定位装置14有时信号失锁的问题,充分发挥两者各自的优势,实现无人机1厘米级的定位精度。
[0049]
由于rtk定位方式在竖直方向上的定位精度相比水平方向较低,在无人机1降落过程中,超声波测距装置12可以精确测量无人机1的离地高度,用于弥补rtk定位方式的不足,以实现无人机1在三维空间中的高精度定位。
[0050]
一种超声波辅助的无人机自主平稳降落方法,包括以下步骤:
[0051]
s1:无人机1进入降落模式,获取着陆点;
[0052]
s2:无人机1向着陆点飞行,通过惯性测量装置13和rtk定位装置14定位,当无人机1飞行至着陆点正上方的预定位置p
target
后保持无人机1的水平方向位置不变;
[0053]
s3:无人机1通过惯性测量装置13和rtk定位装置14定位,以速度v
constant
向下降落,直至离地高度为预设置的最大离地高度h;
[0054]
s4:通过超声波测距装置12测量无人机1的实时离地高度h,飞行控制器11根据实时离地高度h实时地调整无人机1的降落速度v,v的调整公式具体为:
[0055]
v=k*(h
‑
d
truth
)+v
crash
[0056]
k=(v
constant
‑
v
crash
)/(h
‑
d
truth
)
[0057]
其中,d
truth
表示无人机1静置于地面时超声波测距装置12测量的离地高度,v
crash
表示预设置的触地速度;
[0058]
s5:根据无人机1的实时离地高度h判断无人机1是否触地,若无人机1触地,则停止螺旋桨,否则,重复步骤s4。
[0059]
本实施例中,无人机1自主平稳降落的控制方法流程图如图3所示。
[0060]
s1:无人机1进入降落模式,获取着陆点。当无人机1完成作业任务后准备返航,或者飞行控制器11接收到返航命令,无人机1进入降落模式,获取着陆点的坐标。
[0061]
s2:无人机1向着陆点飞行,此过程中无人机1通过惯性测量装置13和rtk定位装置14定位,如果无人机1的实际位置p
truth
(x1,y1,z1)与预定位置p
target
(x2,y2,z2)之间满足以下关系,则认为无人机1已经飞行至着陆点正上方的预定位置p
target
:
[0062][0063]
其中,p
threshold
为预设置的第一精度阈值,本实施例中取0.1m,此时,无人机1在着陆点正上方,后续过程中不再改变无人机1的水平方向位置,只调整竖直方向的位置。
[0064]
s3:无人机1通过惯性测量装置13和rtk定位装置14定位,以速度v
constant
向下降落,直至离地高度为预设置的最大离地高度h。
[0065]
预设置的最大离地高度h不超过超声波测距装置12的量程范围且大于h
safe
,h
safe
表示无人机的安全降落高度:
[0066]
[0067]
其中,a表示无人机的最大降落加速度。
[0068]
本实施例中,超声波测距装置12的量程范围为5m,将最大离地高度h设为5m,预定位置p
target
(x2,y2,z2)的位置在着陆点正上方5m以上的高度,当实际位置p
truth
(x1,y1,z1)与预定位置p
target
(x2,y2,z2)之间相差0.1m时,完成步骤s2。
[0069]
完成步骤s2后,通过惯性测量装置13和rtk定位装置14定位,此时无人机1的离地高度大于等于5m,无人机1保持水平位置不变,以v
constant
=5m/s的速度垂直向下运动至离地高度5m处,此阶段同样采用惯性测量装置13和rtk定位装置14组合的方式对无人机1进行定位。
[0070]
s4:通过超声波测距装置12测量无人机1的实时离地高度h,飞行控制器11根据实时离地高度h实时地调整无人机1的降落速度v,v的调整公式具体为:
[0071]
v=k*(h
‑
d
truth
)+v
crash
[0072]
k=(v
constant
‑
v
crash
)/(h
‑
d
truth
)
[0073]
其中,d
truth
表示无人机1静置于地面时超声波测距装置12测量的离地高度,v
crash
表示预设置的触地速度。
[0074]
本实施例中,无人机1水平放置于地面时超声波测距装置12所测得的高度为0.1m,结合无人机1的结构、体积和材料等因素,预设置的触地速度为0.2m/s,即d
truth
=0.1m,v
crash
=0.2m/s。在其他实施方式中也可以根据实际情况调节触地速度的大小,为了降低了无人机着陆时与地面撞击导致无人机受损的风险,触地速度v
crash
应尽可能的小。
[0075]
保持无人机1的水平方向位置不变,根据无人机离地高度h实时调整其降落速度v,使无人机1以预设置的触地速度v
crash
降落至地面,减小其着陆时与地面的冲击,以免造成损伤。
[0076]
s5:根据无人机1的实时离地高度h判断无人机1是否触地,若无人机1触地,则停止螺旋桨,否则,重复步骤s4。
[0077]
如果无人机1的实时离地高度h小于预设置的第二精度阈值d
threshold
,则认为无人机1触地。第二精度阈值d
threshold
=d
truth
+δd,其中,δd可依据实际情况设定,不应太大,否则无人机1将过早判定为触地而停机,增加无人机1着陆风险,具体的,0<δd<0.05m。
[0078]
本实施例中,由于无人机1水平放置于地面时超声波测距装置12所测得的高度为0.1m,δd取0.02m,第二精度阈值d
threshold
为0.12m,即当超声波测距装置12所测得的无人机1离地高度小于0.12m时判定为无人机1触地,螺旋桨停止转动,无人机1自主平稳降落完成。
[0079]
整个降落过程中,无人机1的速度v与离地高度h之间的关系如图4所示。
[0080]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1