一种民机自动驾驶仪高度改平功能控制方法和系统与流程
1.本公开涉及飞机控制系统,尤其涉及一种民机自动驾驶仪高度改平功能控制方法和系统。
背景技术:
2.现代民机的设计不仅要追求高的安全性,还要求给乘客更高的舒适性,从而来提高飞机运营中的市场竞争力。飞机的舒适性与飞行过程中的过载息息相关,过载是升力与重量的比值,当过载为1g时,是最舒适的状态,当飞机在滚转,俯仰或速度发生改变时,过载会相应发生变动,在自动驾驶过程中要避免因为飞行状态的改变而导致过载产生较大的突变量。
3.在ac25.1329
‑
1b的第六章对自动飞行的工作模式的标准作了详细的规范,将自动飞行的工作模式分为:水平模式、垂直模式、多轴模式、自动油门模式。垂直模式是自动驾驶的三轴控制之一。垂直模式主要为了实现飞机高度的改变或保持,驾驶员可通过垂直速度模式、航迹倾角模式或高度层改变模式去使飞机爬升或下降。当用合适的垂直模式时,为避免无约束的爬升或下滑,高度选择控制器应该在垂直模式可以选择前设置为新的目标高度。
4.在爬升或下降过程中,当接近目标高度(该高度包括fmcp上设置的高度、限制高度或飞行计划里设置的巡航高度)时,为了能够平滑地过渡到目标高度,飞机会进入改平“level off”(v/s=0m/s)功能,若自动驾驶控制面板上有改平按钮,驾驶员也可人工手动改平飞机。在gjb 1690
‑
93《有人飞机自动驾驶仪通用规范》中,要求自动驾驶仪能在任何飞行姿态上使飞机改平,并使飞机平滑地沿着最小角度自动地恢复到水平直线飞行状态,在改平过程中应该断开其他控制模态,当飞机达到水平时,它应是处于姿态保持模态或高度保持模态。
5.当前,民航飞机的模式控制面板(mcp)上可通过按压垂直速度的旋钮“push to level off”(面板右侧)来接通高度改平功能。图1示出了这一模式控制面板100。
6.鉴于自动驾驶在现今民机电传控制律中的重要作用,为了提高飞机的安全性并且保障乘客乘坐飞机的舒适性,需要一种改进的民机自动驾驶仪高度改平功能控制方法和系统。
技术实现要素:
7.提供本发明内容来以简化形式介绍将在以下具体实施方式部分中进一步描述的一些概念。本发明内容并不旨在标识出所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
8.本发明的目的是要提供一种自动驾驶中垂直方向高度改平的方法和系统。具体而言,本发明提供了一种民机自动驾驶仪高度改平功能控制方法,所述方法包括:
9.在确定要接通改平功能时存储此时的垂直速度;
10.在所述垂直速度的绝对值大于第一速度阈值并且当前飞行高度相对于给定高度层的高度偏差模量大于第一高度偏差阈值的情况下确定用于所述改平功能的第一给定垂直速度;
11.在所述垂直速度的绝对值小于等于所述第一速度阈值并且所述高度偏差模量大于所述第一高度偏差阈值的情况下确定用于所述改平功能的第二给定垂直速度;
12.在所述高度偏差模量小于等于所述第一高度偏差阈值的情况下确定用于所述改平功能的第三给定垂直速度;以及
13.进入高度保持模式。
14.在本发明的一个实施例中,提供了一种民机自动驾驶仪高度改平功能控制系统,所述系统包括:
15.用于在确定要接通改平功能时存储此时的垂直速度的装置;
16.用于在所述垂直速度的绝对值大于第一速度阈值并且当前飞行高度相对于给定高度层的高度偏差模量大于第一高度偏差阈值的情况下确定用于所述改平功能的第一给定垂直速度的装置;
17.用于在所述垂直速度的绝对值小于等于所述第一速度阈值并且所述高度偏差模量大于所述第一高度偏差阈值的情况下确定用于所述改平功能的第二给定垂直速度的装置;
18.用于在所述高度偏差模量小于等于所述第一高度偏差阈值的情况下确定用于所述改平功能的第三给定垂直速度的装置;以及
19.用于进入高度保持模式的装置。
20.在本发明的另一实施例中,还提供了一种存储计算机指令的计算机存储介质,这些指令用于:
21.在确定要接通改平功能时存储此时的垂直速度;
22.在所述垂直速度的绝对值大于第一速度阈值并且当前飞行高度相对于给定高度层的高度偏差模量大于第一高度偏差阈值的情况下确定用于所述改平功能的第一给定垂直速度;
23.在所述垂直速度的绝对值小于等于所述第一速度阈值并且所述高度偏差模量大于所述第一高度偏差阈值的情况下确定用于所述改平功能的第二给定垂直速度;
24.在所述高度偏差模量小于等于所述第一高度偏差阈值的情况下确定用于所述改平功能的第三给定垂直速度;以及
25.进入高度保持模式。
26.在结合附图研读了下文对本发明的具体示例性实施例的描述之后,本发明的其他方面、特征和实施例对于本领域普通技术人员将是明显的。尽管本发明的特征在以下可能是针对某些实施例和附图来讨论的,但本发明的全部实施例可包括本文所讨论的有利特征中的一个或多个。换言之,尽管可能讨论了一个或多个实施例具有某些有利特征,但也可以根据本文讨论的本发明的各种实施例使用此类特征中的一个或多个特征。以类似方式,尽管示例性实施例在下文可能是作为设备、系统或方法实施例进行讨论的,但是应当领会,此类示例性实施例可以在各种设备、系统、和方法中实现。
附图说明
27.为了能详细理解本公开的以上陈述的特征所用的方式,可参照各方面来对以上简要概述的内容进行更具体的描述,其中一些方面在附图中阐示。然而应该注意,附图仅阐示了本公开的某些典型方面,故不应被认为限定其范围,因为本描述可允许有其他等同有效的方面。
28.图1示出了民航飞机的飞行控制面板。
29.图2示出了根据本公开的一个实施例的改平功能控制模块。
30.图3示出了根据本公开的一个实施例的高度变化过程。
31.图4示出了根据本公开的一个实施例的垂直速度变化过程。
32.图5示出了根据本公开的一个实施例的在垂直速度模式下飞机过载的变化过程。
33.图6示出了根据本公开的一个实施例的改平接通组件的接通逻辑。
34.图7示出了根据本公开的一个实施例的改平功能控制模块的改平功能实现流程。
具体实施方式
35.以下将参考形成本发明一部分并示出各具体示例性实施例的附图更详尽地描述各个实施例。然而,各实施例可以以许多不同的形式来实现,并且不应将其解释为限制此处所阐述的各实施例;相反地,提供这些实施例以使得本公开变得透彻和完整,并且将这些实施例的范围完全传达给本领域普通技术人员。各实施例可按照方法、系统或设备来实施。因此,这些实施例可采用全硬件实现形式、全软件实现形式或者结合软件和硬件方面的实现形式。因此,以下具体实施方式并非是局限性的。
36.各流程图中的步骤可通过硬件(例如,处理器、引擎、存储器、电路)、软件(例如,操作系统、应用、驱动程序、机器/处理器可执行指令)或其组合来执行。如本领域普通技术人员将理解的,各实施例可以包括比示出的更多或更少的步骤。
37.为了在保证飞机安全性的同时保障乘客乘坐飞机的舒适性,本公开中涉及的技术方案能够在自动驾驶垂直模式下在飞机到达目标高度前平稳地过渡,满足控制精度,且过载变化量(δnz)小。
38.为此,自动驾驶垂直方向的控制通过过载(nz)控制律实现,当主飞控与自动飞行控制律为串联时,自动驾驶控制律根据控制目标计算得出δnz,δnz指令进入主飞行控制律系统,由主飞行控制律计算得出相应的舵面偏度指令。在垂直速度模式下飞机过载变化过程的详细描述将在下文中参照图4描述。
39.图2示出了根据本公开的一个实施例的改平功能控制模块200。
40.当接近给定高度层高度时并且在满足改平功能触发条件的情况下接通改平功能。如图2所示,飞机的改平功能由改平功能控制模块200来控制和实现。改平功能的触发由改平功能控制模块200中的改平接通组件202来判断。具体而言,改平接通组件202如下计算当前飞行高度相对于给定高度层的偏差模量以确定是否满足接通高度条件:
41.|δh
giv
|=|h
‑
h
giv
|,
42.其中h表示当前飞行高度,单位为m;h
giv
表示给定高度层,单位为m。
43.当满足以下条件:k
·
v
z2
‑
|h
‑
h
giv
|≥0时,升降舵通道中的控制律切换为给定垂直速度控制律,增益系数k=1(作为示例而非限制)。改平接通组件202的接通逻辑细节将在下
文中参照图5来描述。
44.在该值下进行升降舵通道的控制律切换,改平功能控制模块200存储此时的垂直速度,并在计算轨迹改平时使用。垂直速度的存储值v
zo
通过下式标记:
45.v
z
(t
off/on
)=v
zo
,
ꢀꢀꢀ
(1)
46.其中t
off/on
表示当前飞行时刻,在此时间下改平功能控制模块200进行升降舵通道控制律切换。
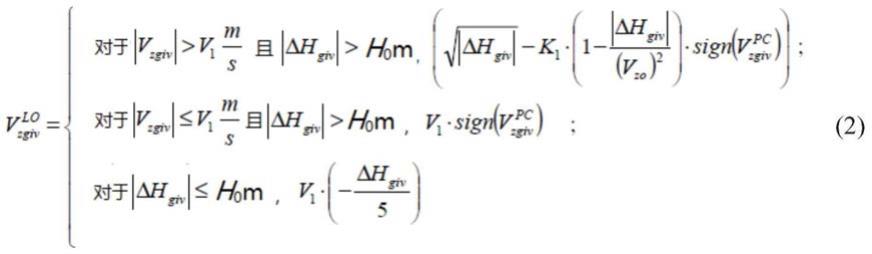
47.本发明中改平功能给定垂直速度由改平功能控制模块200通过下式(2)的三个过程来确定,最终使得垂直速度平稳减到0。
[0048][0049]
在式(2)中:为符号函数,等于1垂直速度为正,飞机爬升;等于
‑
1垂直速度为负,飞机下降。在当前模式为垂直速度模式时,为控制面板上驾驶员选定的垂直速度,在当前模式为其他垂直模式时,为改平功能接通前垂直速度;v1为常数,可根据设计目标或飞机特性通过仿真测试得到,也能通过试飞数据对该值进行修正,用作第一速度阈值。
[0050]
其中:1)参数k1用于平稳注销掉所存储的垂直速度v
zo
,并且如本领域技术人员可以理解的,该参数可被设置为满足要求的任何值,而不限于任何特定值;
[0051]
2)计算给定改平垂直速度的第一和第二个公式在计算垂直速度绝对值大于v
1 m/s或小于等于v
1 m/s且同时在相对于高度层的给定偏差大于第一高度偏差阈值h
0 m时工作。作为示例而非限制,经调参分析选择v1=1.5,并且如本领域技术人员可以理解的,h
0 m不限于任何特定值并且可根据具体规范或要求自行设置;以及
[0052]
3)计算给定改平垂直速度的第三个公式在相对于高度层给定偏差小于等于h
0 m时工作。
[0053]
这三个过程的附加细节将在下文中参照图4来描述。在改平功能控制模块200完成高度改平功能后,飞机进入高度保持模式。
[0054]
在本发明的各实施例中,用到高度改平功能的垂直模式一般包括:垂直速度模式和高度层改变模式。在本发明的一个实施例中,以垂直速度模式(作为示例而非限制)说明该改平功能的接通逻辑和流程的优点。在垂直速度模式下通过自动驾驶升降舵通道来提供并稳定给定的垂直速度值,自动油门接通速度/马赫模态,维持给定的表速,当“level off(改平)”功能接通时,垂直速度开始减小,当到达目标高度时,垂直速度模式断开,高度模式接通。作为示例而非限制,配平高度可以为5950m,给定高度的偏差可以为1000m,即
则目标高度为6950m。给定垂直速度为15m/s进行仿真,仿真结果如以下图3到图5所示。如本领域技术人员可以理解的,也可以使用任何其他垂直速度进行仿真,而不背离本发明的范围。
[0055]
接通本发明中的改平控制能前后的飞机高度变化在图3中示出,图3示出了高度变化的过程300。作为示例而非限制,虚线为给定的高度土10m,10m是高度保持的精度值。直线为给出的高度值指令,曲线为输出的实际的高度值。可看出在即将到达目标高度时,经由根据本发明的各实施例的改平控制功能,高度光滑地过渡到目标高度值,没有超调,最终高度保持在要求的精度范围内。如本领域技术人员可以理解的,在本发明的其他实施例中,可以使用不同于10m的其他精度值,而不背离本发明的范围。
[0056]
图4示出了根据本公开的一个实施例的垂直速度变化过程400。在图4中,作为示例而非限制,1为通过自动驾驶控制面板给定的垂直速度15m/s,2为实际的垂直速度。3、4、5为改平功能接通后的工作过程。具体而言,在阶段3中,使用改平控制律式(2)中的第一个函数,即对于且来确定用于改平功能的第一给定垂直速度,它是一个非线性的过程,通过式(2)中的第一个公式来将垂直速度平稳地减小;在阶段4中,使用式(2)中的第二个函数,即对于且来确定用于改平功能的第二给定垂直速度,其使得垂直速度的减小过程经历短暂的停滞,从而使飞机维持一个较小的垂直速度继续飞行;在阶段5中,使用式(2)中的第三个函数,即对于|δh
giv
|≤h0m,来确定用于改平功能的第三给定垂直速度,从而将垂直速度逐渐减小,当满足垂直速度小于第二速度阈值,高度偏差模量小于第二高度偏差阈值时,飞机进入高度保持模式,垂直速度趋近于0,至此飞机的高度改平过程结束。
[0057]
图5示出了根据本公开的一个实施例的在垂直速度模式下飞机过载的变化过程。如图5所示,在a)和b)中,上下两条虚线之间的范围是过载控制的精度范围,在飞机配平后平飞时过载为1,单位为g,g=9.8m/s2。作为示例而非限制,设置最大过载变化量|δnz|=0.15,则过载的控制范围为0.85~1.15,如两条虚线所示;直线为自动驾驶过载的极限控制范围,若过载超过直线,将不满足自动驾驶的控制要求,并会使乘客感到极大的不舒服感;黑色曲线为自动驾驶控制律计算出的过载指令,灰色曲线为实际的过载响应。作为示例而非限制,图5中a)、b)分别为v1=3和v1=1.5时的过载曲线,可看出当v1=3时,指令过载在速度切换时变化速率极大,变化量也偏大,对比之下设计参数v1为1.5时过载变化量小,变化速率较缓,控制在要求的精度范围内,过渡过程平稳。如本领域技术人员可以理解的,也可使用其他精度范围、控制范围和垂直速度来进行垂直速度模式下飞机过载仿真,而不背离本发明的范围。
[0058]
图6示出了根据本公开的一个实施例的图2中的改平接通组件202的接通逻辑600。
如图6所示,当满足改平功能的接通逻辑时,改平功能将立即接通,并按照上文中的式(2)给出的三个函数将给定垂直速度分为三个阶段逐步减少到零。
[0059]
改平功能逻辑触发所需的输入信号包括:当前垂直速度、当前高度、给定高度以及垂直模式接通的逻辑信号包括垂直速度模式开关、高度层改变模式开关或手动接通改平开关。
[0060]
改平功能的接通逻辑的具体实现方式如下:
[0061]
1为接通时的高度条件要求,其接通的高度条件为:k
·
v
z2
‑
|h
‑
h
giv
|≥0,即当前垂直速度的平方乘以一个增益k,减去当前高度与给定高度的差量的绝对值大于等于0。2为接通的模式开关信号条件,模式开关信号条件包括垂直速度模式开关信号和高度层改变模式开关信号,该条件是否被满足的判断逻辑为只要这两个开关信号中有一个接通,则满足2的条件;3为逻辑“and(和)”的判断模块,即需要1和2同时满足,输出才能为“真”;4为逻辑“or(或)”的判断模块,即输入信号有一个为真,输出即可为“真”。即,在同时满足1和2的条件或者接收到手动改平开关信号的情况下为真;5为信号锁存器,当输入为真时,将这一刻的信号锁存,锁存的目的是,一旦满足接通条件,将不允许中途被打断,直至改平过程完成,6即为输出的接通高度改平功能的逻辑信号,信号为“1”表示接通,“0”表示未接通。
[0062]
图7示出了根据本公开的一个实施例的改平功能控制模块的改平功能实现流程。该流程开始于框702,其中取得飞机当前高度、给定高度、垂直速度、接通模态,并将其作为输入提供给框704。在框704,判断是否满足改平功能接入条件。如果满足,则在框706进入高度改平功能,并且在框708存储此刻的垂直速度v
zo
,并在计算轨迹改平(即,使用上述式(2)中的第一个公式来计算第一个给定垂直速度vzgiv_lo1)时用作输入。
[0063]
随后,流程继续至判定框710,其中确定相对于高度层的给定偏差是否大于第一高度偏差阈值h
0 m。如果是,则继续至判定框712,其中确定垂直速度绝对值是否大于第一速度阈值v1。如果在框712确定垂直速度绝对值大于v1,则流程继续至框714,指令给定垂直速度为vzgiv_lo1,该给定垂直速度通过式(2)中的第一个函数来确定,即对于且以便将垂直速度平稳地减小。如果在框712确定垂直速度绝对值不大于v1,则流程继续至框716,指令给定垂直速度为vzgiv_lo2,该给定垂直速度通过式(2)中的第二个函数来确定,即对于且以使得垂直速度的减小过程经历短暂的停滞,从而使飞机维持一个较小的垂直速度继续飞行。如果在框710处的判断为否,则流程继续至框718,指令给定垂直速度为vzgiv_lo3,该给定垂直速度通过式(2)中的第三个函数来确定,即对于|δh
giv
|≤h0m,从而将垂直速度逐渐减小为0。在本发明的一个实施例中,在完成了框714处的处理后,接着按序完成框716和718处的操作以实现改平功能(即,框714、
716、718分别对应于图4所示的三个阶段过程3、4、5)。在完成框718处的操作后,流程行进至判定框720,其中判断垂直速度绝对值是否小于第二速度阈值v2且高度偏差模量小于第二高度偏差阈值h1m。如果垂直速度绝对值小于v2且高度偏差模量小于h1m,则在框722处进入高度保持模式,至此飞机的垂直速度减为0且高度改平过程结束。如果不满足框720中的条件,则继续执行框718中的操作,直到满足框720中的条件为止。如本领域技术人员可以理解的,v2和h1m的值不限于特定值,而是可根据具体规范或需要来设置v2和h1m的值以使得通过执行框718中的操作能够逐渐减小垂直速度和高度偏差模量直至满足框720中的条件。。
[0064]
以上参考根据本发明的实施例的方法、系统和计算机程序产品的框图和/或操作说明描述了本发明的实施例。框中所注明的各功能/动作可以按不同于任何流程图所示的次序出现。例如,取决于所涉及的功能/动作,连续示出的两个框基本上可以同时执行,或者这些框有时可以按相反的次序来执行。
[0065]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1