一种UUV往返式对接航路控制方法与流程
一种uuv往返式对接航路控制方法
技术领域
1.本发明属于水下航行器航行控制技术领域,具体涉及一种uuv往返式对接航路控制方法。
背景技术:
2.随着信息技术的不断发展,无人低速水下航行器(uuv)作为探索海洋空间的有力工具之一,在军事和科学研究方面起着越来越重要的作用。未来的uuv需要更长的水下工作时间、更隐蔽的信息收集能力以及更强大的通信能力,而这些目标的实现主要受到自身携带的能源和水下通信能力的限制,因此,水下对接装置作为补给支持及信息交换系统就显得十分重要。
3.目前,国内外涌现了多种对接(接驳)系统,根据对接协作目标的结构要求可以分为全方位对接装置和单一方向对接装置。全方位对接装置结构复杂,而单一方向对接装置设计简单,易于实现。
4.单一方向对接装置常采用圆锥形结构或喇叭口形结构,通过缆绳锚系于海底或直接坐底,此类装置对接口设计简单,但对接口一般尺寸较小,也没有相应的机械手等辅助机构,对接难度较高。对接用uuv一般采用单一尾部推进,以减小uuv直径,这对uuv控制提出了较高的要求,uuv的稳定控制、对接航路控制均需要良好的控制算法。
5.对接航路设计时,需同时兼顾目标点、目标朝向的需求。一般的思路是从远处向水下对接装置(对接目标)机动时,将目标视为单点,此时航路控制较简单,只需按照导引指令进行相应机动;当uuv机动至对接目标一定距离时,航路控制不仅要按照导引指令接近目标,还必须兼顾对接口朝向和对接“面”(将对接口朝向的中轴线视为对接控制面)的需求,两者统筹兼顾才能实现对接;同时,对接用uuv速度低,易被洋流影响,对接航路还需考虑洋流作用,尽量降低洋流带来的误差。
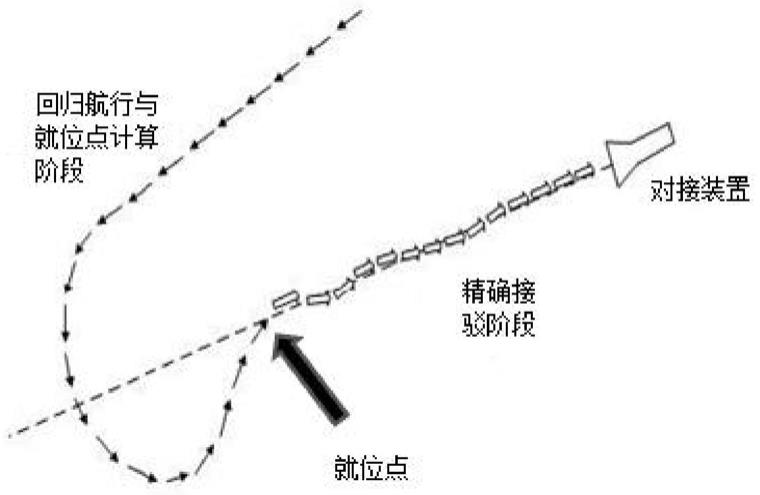
6.从目前公开资料看,对接航路控制一般采取先航行至中途就位点,再从就位点进行精确接驳的方式,如附图1所示。这种方法下,远程需利用uuv自身信息(主要为定位信息)计算就位点,到达就位点后,再沿中轴线向对接口进行精确接驳。这种方法虽然算法易实现,但依赖uuv自身的定位信息和目标位置信息,对硬件成本要求较高,同时对接期间目标口朝向发生变化时,需重新计算就位点。
技术实现要素:
7.本发明的目的在于解决传统对接方法依赖uuv自身的定位信息和目标位置信息,对硬件成本要求较高,同时对接期间目标口朝向发生变化时,需重新计算就位点的问题,而提供一种uuv往返式对接航路控制方法。
8.为实现上述目的,本发明所提供的技术解决方案是:
9.一种uuv往返式对接航路控制方法,其特殊之处在于,包括以下步骤:
10.1)水下航行器导引系统搜寻目标水下对接装置,并将导引信息反馈给水下航行器
控制系统;
11.2)水下航行器控制系统按照步骤1)反馈的导引信息生成导引指令控制uuv执行远程接近;
12.3)直至uuv与目标水下对接装置距离小于30米时,水下航行器控制系统控制uuv远离目标水下对接装置进行航行,主航向与目标水下对接装置的对接口朝向相同;
13.4)uuv航行至与目标水下对接装置距离大于160米时,水下航行器控制系统控制uuv掉头(原航向角+180
°
)正对目标水下对接装置继续航行,同时,导引系统再次搜寻目标水下对接装置,并将导引信息反馈给水下航行器控制系统;
14.5)水下航行器控制系统根据步骤4)反馈的导引信息、航向信息判断目标水平方位角(即uuv航路与对接中轴线的夹角,掌握水下航行器主航向与当前目标水平方位)以及uuv与目标水下对接装置之间的距离;
15.当目标水平方位角大于2
°
时,水下航行器控制系统对uuv进行横移控制,目标水下对接装置在左侧时向左横移,否则向右横移,每次横移结束后再次判断目标水平方位角,直至目标水平方位角小于2
°
为末程精确对接提供良好的态势;
16.当距离小于30米时,结束航路控制,转入末程精确对接阶段。
17.进一步地,步骤3)中,直至uuv与目标水下对接装置距离为20~30米时,水下航行器控制系统控制uuv远离目标水下对接装置进行航行,主航向与目标水下对接装置的对接口朝向相同。
18.进一步地,步骤5)中,所述横移控制的次数为1~2次,一般是先大幅横移,再进行小幅横移,便可航行在对接中轴线上或对接中轴线附近。
19.进一步地,所述uuv采用单一尾部推进。
20.本发明的优点是:
21.1.本发明适用于采用单一尾部推进的低速水下航行器的水下对接,对接航路控制方法在对接控制中,兼顾目标位置、目标朝向,克服洋流影响,在缺乏定位信息的情况下,仅利用导引信息和航路控制算法便可实现水下对接,降低了uuv的对接成本。
22.2.本发明方法不需依赖uuv自身定位信息,仅靠导引信息、目标口朝向信息,即可完成对接航路控制,同时,该方法巧妙利用了对接口朝向的顺流特性,即对接口在洋流作用下必然为顺流的特点,通过远离目标+往返式航行,将对接主航路置于顺流或逆流态势,大大降低了侧向洋流对航向带来的影响,对接时只需考虑对接速度的误差。
附图说明
23.图1为传统中途就位点式对接航路示意图;
24.图2为本发明往返式对接航路示意图。
具体实施方式
25.以下结合具体实施例对本发明的内容作进一步的详细描述:
26.如图2所示,单一尾部推进的低速水下航行器往返式对接航路控制方法,包括以下步骤:
27.1)水下航行器导引系统搜寻目标水下对接装置,并将导引信息反馈给水下航行器
控制系统;
28.2)水下航行器控制系统按照步骤1)反馈的导引信息生成导引指令控制uuv执行远程接近目标对接装置;
29.3)水下航行器持续航行至目标水下对接装置附近(20~30米)时,水下航行器控制系统控制uuv远离目标水下对接装置进行航行,主航向与目标水下对接装置的对接口朝向相同;
30.4)uuv航行至与目标水下对接装置距离大于160米时,水下航行器控制系统控制uuv掉头(原航向角+180
°
)正对目标水下对接装置继续航行(此时uuv的主航向已平行于对接中轴线),同时,导引系统再次搜寻目标水下对接装置,并将导引信息反馈给水下航行器控制系统;
31.5)水下航行器控制系统根据步骤4)反馈的导引信息、航向信息判断目标水平方位角(即uuv航路与对接中轴线的夹角,以此为依据向对接中轴线横移)以及uuv与目标水下对接装置之间的距离;
32.当目标水平方位角大于2
°
时,水下航行器控制系统对uuv进行1~2次横移控制,一般是先大幅横移,再进行小幅横移,便可航行在对接中轴线上或对接中轴线附近,直至目标水平方位角小于2
°
为末程精确对接提供良好的态势;目标水下对接装置在左侧时向左横移,否则向右横移,每次横移结束后再次判断目标水平方位角;
33.当距离小于30米时,结束航路控制,转入末程精确对接阶段。
34.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1