一种云交管装置及其方法与流程
本发明涉及agv交管控制领域,尤其是一种云交管装置及其方法。
背景技术:
工业自动化是当代发展的方向,而agv搬运在工业自动化中起到极其重要的作用。但是,一个公司的自动化程度越高,所需的agv设备就越多,对于这些agv如果缺乏有效的交管控制就会很容易出现撞车,或者互相等待的情况,就此对agv的交通管制就显得异常重要。
当前很多的agv调度系统都会有agv交管的功能,但是这个交管只能针对本调度系统上的agv生效,管制的对象单一,如果这些agv来自不同的供应商,那么各个供应商之间都会使用不同的调度系统对各自的agv进行控制,如果一个区域内有多个调度系统,那么如何让不同调度系统的agv有序高效的运行就成了最大的问题。
为了解决这个问题,本发明了提供了一种新型的agv交管方法,可以使不同调度系统的agv在云交管区有秩序的通过,避免出现交通堵塞的情况。
技术实现要素:
本发明的第一个目的是提供:
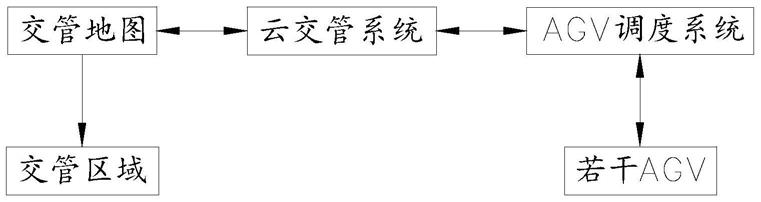
一种云交管装置,包括云交管系统、若干agv调度系统和交管地图,所述交管地图内设有若干交管区域,所述agv调度系统用于调度若干agv,若干所述agv调度系统与所述云交管系统通讯连接,当隶属于所述agv调度系统的agv进入所述交管区域时,所述agv调度系统向所述云交管发送请求通过指令,所述云交管系统根据交管区域的情况,向发送请求通过指令的agv调度系统反馈操作指令。
优选的,所述云交管系统包括通讯模块、存储模块和交管区域管理模块,所述通讯模块用于与各agv调度系统通讯,并根据接收到的请求指令向所述交管区域管理模块反馈,所述存储模块用于存储若干个交管区域的编号及其状态信息,所述交管区域管理模块根据请求指令,以及存储模块的存储信息作出调度指令。
本发明的第二个目的是提供:
一种agv云交管方法,其特征在于,应用第一发明目的的云交管系统,其包括如下步骤:
a.agv行驶至交管区域并停下,该agv的agv调度系统向所述云交管系统发送请求通过指令;
b.云交管系统接收到请求通过指令后,判断该请求通过指令对应的交管区域是否被占用;
若是,云交管系统反馈禁止通行指令,进入步骤c1;
若否,云交管系统反馈允许通行指令,并对该交管区域进行锁定占用,进入步骤c2;
c1.agv调度系统接收到禁止通行指令后,发送待命指令给agv;
c2.agv调度系统接收到允许通行指令后,发送通行指令给agv,使其通过该交管区域;
d.调度系统监控agv的允许情况,当接收到agv驶出交管区域时,agv调度系统向云交管系统发送驶离信号;
e.云交管系统接收到驶离信号后,释放该交管区域的锁定占用状态,并重复步骤b。
优选的,步骤b中,云交管系统根据所述请求通过指令的交管区域编号,查询该编号的交管区域的状态。
优选的,步骤c1中,agv调度系统每隔10~20秒再次向云交管系统发送请求通过指令,直至接收到允许通行指令。
与现有技术相比,本发明的云交管系统和云交管方法可以有效的统一了所有运行路线的交管区域的控制,使不同调度系统的agv均可以得到统一的调度,避免在不同调度系统的agv在行走路线交汇区处现agv互相等待的死锁、甚至出现刮擦、碰撞的现象,有效地解决不同调度系统的agv在统一区域协调运作问题。
附图说明
图1是本发明的云交管装置的结构框图;
图2是本发明的云交管系统的结构框图;
图3是本发明的agv云交管方法的流程框图;
图4是本发明的agv云交管方法的控制状态一示意图;
图5是本发明的agv云交管方法的控制状态二示意图;
图6是本发明的agv云交管方法的控制状态三示意图;
图7是本发明的agv云交管方法的控制状态四示意图
具体实施方式
参见图1至图2,一种云交管装置,包括云交管系统、若干agv调度系统和交管地图,所述交管地图内设有若干交管区域,所述agv调度系统用于调度若干agv,若干所述agv调度系统与所述云交管系统通讯连接,当隶属于所述agv调度系统的agv进入所述交管区域时,所述agv调度系统向所述云交管发送请求通过指令,所述云交管系统根据交管区域的情况,向发送请求通过指令的agv调度系统反馈操作指令。
作为一种优选的方案,所述云交管系统包括通讯模块、存储模块和交管区域管理模块,所述通讯模块用于与各agv调度系统通讯,并根据接收到的请求指令向所述交管区域管理模块反馈,所述存储模块用于存储若干个交管区域的编号及其状态信息,所述交管区域管理模块根据请求指令,以及存储模块的存储信息作出调度指令。
参见图3,本发明还提供一种agv云交管方法,应用第一发明目的的云交管系统,其包括如下步骤:
a.agv行驶至交管区域并停下,该agv的agv调度系统向所述云交管系统发送请求通过指令;
b.云交管系统接收到请求通过指令后,判断该请求通过指令对应的交管区域是否被占用;具体的,云交管系统根据所述请求通过指令的交管区域编号,查询该编号的交管区域的状态;
若是,云交管系统反馈禁止通行指令,进入步骤c1;
若否,云交管系统反馈允许通行指令,并对该交管区域进行锁定占用,进入步骤c2;
c1.agv调度系统接收到禁止通行指令后,发送待命指令给agv;当agv处于待命的状态的时,agv调度系统每隔10~20秒再次向云交管系统发送请求通过指令,直至接收到允许通行指令。
c2.agv调度系统接收到允许通行指令后,发送通行指令给agv,使其通过该交管区域;
d.调度系统监控agv的允许情况,当接收到agv驶出交管区域时,agv调度系统向云交管系统发送驶离信号;
e.云交管系统接收到驶离信号后,释放该交管区域的锁定占用状态,并重复步骤b。
现具体列举一个调度的例子作简要说明,参见图4至图7,云交管系统与agv调度系统1和agv调度系统2通讯,agv调度系统1是对agv1和agv3进行调度,agv调度系统2是对agv2和agv4进行调度,当agv1到达交管区域边沿的时候,agv1向agv调度系统1发送到达交管区域的指令,agv调度系统1接收到该指令后,向云交管系统发送请求通过指令,云交管调度系统接收到该请求通过指令后,根据该请求通过指令中的交管区域编号,查询该编号下的交管区域的状态,此时该交管区域状态为空闲,云交管调度系统向agv调度系统1反馈允许通行指令,并对该交管区域状态调整为锁定占有,同时agv调度系统1监控agv1的通行情况。此时,当agv2到达交管区域的时,agv调度系统2在接收到agv2的到达指令后向云交管发送请求通过指令,此时云交管系统同样会查询该交管区域的状态,由于此时该交管区域时锁定占有,云交管系统会反馈禁止通行指令,agv调度系统2接收到该指令后,会向agv2发送原地待命的指令,并且agv调度系统2每隔10~20秒再次向云交管系统发送请求通过指令,直至接收到允许通行指令。
当agv1通过交管区域后,agv调度系统1向云交管系统发送驶离信号,请求释放该区域的锁定占有状态,云交管系统接收到该驶离信号后,将该交管区域的状态更新为空闲,同时向agv调度系统2发送允许通行指令,agv调度系统2再向agv2发送通过指令,并对agv2的通行进行监控,以此类推。
与现有技术相比,本发明的云交管系统和云交管方法可以有效的统一了所有运行路线的交管区域的控制,使不同调度系统的agv均可以得到统一的调度,避免在不同调度系统的agv在行走路线交汇区处现agv互相等待的死锁、甚至出现刮擦、碰撞的现象,有效地解决不同调度系统的agv在统一区域协调运作问题。
根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
- 还没有人留言评论。精彩留言会获得点赞!