机器人涂胶机设备用等离子焰体强度监控装置的制作方法
[0001]
本实用新型涉及一种等离子焰体强度监控装置,尤其涉及一种用于机器人涂胶机设备用等离子焰体强度监控装置。
背景技术:
[0002]
随着机器人技术的不断发展和逐步成熟,由于机器人灵活性强、开放程度高以及较好满足生产制造的柔性化要求等特点,越来越多的多样化机器人已经在自动涂胶机设备系统中得到广泛的应用。由本公司申请的中国专利授权公告号cn105032710 b、发明名称为全自动机器人涂胶设备及工艺技术中,为了增加聚氨酯胶条和工件的粘结强度、附着力,在机器人涂胶机设备涂胶前,借助于压缩空气将等离子火焰通过等离子处理头沿着工件涂胶轨迹喷向工件的表面,使其对工件表面进行等离子体活化处理。但该专利技术在等离子体活化处理过程中缺少对等离子焰体强度的实时监控功能,由此,有必要研发一种机器人涂胶机设备用等离子焰体强度监控装置。
技术实现要素:
[0003]
为了克服上述技术存在的问题,有必要研发一种带有对等离子焰体强度进行实时监控功能、并具有较强稳定性、可靠性的机器人涂胶机设备用等离子焰体强度监控装置,确保等离子体活化处理过程中所得到的是高品质的等离子焰体。
[0004]
本实用新型为解决上述技术问题采取的技术方案是:本实用新型整体设备包括上位工控主机、机器人控制器、低温等离子发生装置、六自由度关节工业机器人、等离子喷枪、工作平台、阴阳极线及气体管路、光纤束传感探头、监控装置、can总线连接传输网络。
[0005]
上位工控主机通过网线连接以太网modbus服务器,上位工控主机还通过can总线连接传输网络分别连接有机器人控制器、低温等离子发生装置、工作平台、监控装置;低温等离子发生装置是将等离子喷枪通过夹具固定在工业机器人的腕部上,监控装置是将光纤束传感探头通过夹具固定在工业机器人腕部等离子喷枪的一侧面间隔预定距离的位置。
[0006]
can总线连接传输网络是由can总线通过光纤中继器i、光纤中继器ii连通光纤进行数据网络传输,其光纤输出的末端通过can/usb模块将can总线连接传输网络连接至上位工控主机;
[0007]
can总线在传输机器人控制器、低温等离子发生装置、工作平台、监控装置运行上传汇总数据时,光纤中继器ii将can信号转变为光纤信号、并传递给光纤中继器i,光纤中继器i将光纤信号转化成can信号,can信号再经过can/usb模块处理后传输给上位工控主机;作为下位机的机器人控制器、低温等离子发生装置、工作平台、监控装置运行发生故障报警或操作人员手动操作时,控制机器人控制器、低温等离子发生装置、工作平台、监控装置启停指令传递方式则反之。
[0008]
监控plc控制器分别与信号发生器、电源管理模块、接口模块、触摸屏、报警显示模块、数据存储器、反馈控制回路、采样频率调节回路、a/d转换电路电性连接,信号发生器、光
纤声光调制器驱动器、光纤声光调制器、光纤连接器ii、光电探测器、信号调理放大电路、a/d转换电路顺次电性连接,光纤声光调制器、光纤连接器i、光纤束传感探头顺次电性连接,反馈控制回路与信号调理放大电路电性连接,采样频率调节回路与a/d转换电路电性连接,电源管理模块分别与信号发生器、光纤声光调制器驱动器、光纤声光调制器、光纤连接器ii、光电探测器、信号调理放大电路、a/d转换电路、触摸屏、报警显示模块、数据存储器、反馈控制回路、采样频率调节回路电性连接。
[0009]
dc-dc电路与脉冲调整电路电性连接,dc-dc电路、振荡电路、2ask调制电路、前置放大器、功率放大电路、阻抗匹配网络电路、功率输出顺次电性连接,脉冲输入信号、脉冲调整电路、控制器调整电路、2ask调制电路顺次电性连接。
[0010]
本实用新型的有益效果是:
[0011]
1.使用can总线组建网络,基于光纤中继器连通光纤特点,本装置具有通信速率高及数据通信实时性强的特点;
[0012]
2.本装置统一布网,成本低,连接容易,易于组成稳定的等离子体表面处理及监控装置的监测控制网络;
[0013]
3.本控制及监控网络具有强大的独立性、稳定性和自由性能,选用plc控制器抗干扰能力强,连续运转稳定性好;
[0014]
4.通过光纤束传感探头检测等离子焰体的光振幅信号、由光电探测器转换成电压信号,能够按照等离子焰体的输出光强度与对应电压信号的线性关系强弱进行显示。
附图说明
[0015]
图1是本实用新型机器人涂胶机设备整体设备的组成结构示意图;
[0016]
图2是本实用新型基于can总线技术的整体设备控制系统组成结构示意图;
[0017]
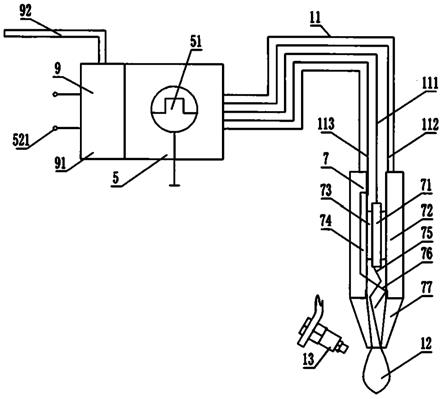
图3是本实用新型低温等离子发生装置的组成结构示意图;
[0018]
图4是本实用新型等离子监控装置控制系统组成结构示意图;
[0019]
图5是本实用新型等离子监控装置的光纤声光调制器驱动器组成结构示意图;
[0020]
图6是本实用新型等离子监控装置光纤声光调制器组成结构示意图;
[0021]
图中,1、服务器,2、上位工控主机,3、机器人控制器,4、示教器,5、低温等离子发生装置、6、工业机器人,7、等离子喷枪,8、工作平台,9、工业气源单元,10、待处理工件,11、阴阳极线及气体管路,12、等离子焰体,13、光纤束传感探头,14、监控装置,15、can总线连接传输网络,51、等离子plc控制器,521、输入电流,71、中心电极,72、外壳无电位电极,73、绝缘套管,74、气体管道,75、形成等离子电弧,76、气体流量,77、喷嘴,91、气体流量传感器,92、输气管路,111、中心电极阳极线,112、外壳无电位电极阴极线,113、气体管路,141、监控plc控制器,142、电源管理模块,143、接口模块,144、触摸屏,145、报警显示模块,146、数据存储器,147、反馈控制回路,148、采样频率调节回路,1411、信号发生器,1412、光纤声光调制器驱动器,1413、光纤声光调制器,1414、光纤连接器ii,1415、光电探测器,1416、信号调理放大电路,1417、a/d转换电路,1418、光纤连接器i,14121、脉冲输入信号,14122、dc-dc电路,14123、脉冲调理电路,14124、振荡电路,14125、2ask调制电路,14126、功率放大电路,14127、阻抗匹配网络电路,14128、功率输出。
具体实施方式
[0022]
如图1、图2所示,本实用新型整体设备包括上位工控主机2、机器人控制器3、低温等离子发生装置5、六自由度关节工业机器人6、等离子喷枪7、工作平台8、阴阳极线及气体管路11、光纤束传感探头13、监控装置14、can总线连接传输网络15,其工作过程为:上位工控主机2读取包含轨迹和工艺参数信息的文本,将运动轨迹和工艺参数通过can总线连接传输网络15发送给机器人控制器3,经过命令解释后工业机器人6读取轨迹信息并运行,工艺参数信息同时发送给低温等离子发生装置5,通过数据采集卡的d/a转换实时控制电源的工艺参数,a/d转换采集工艺参数,形成功率闭环控制。
[0023]
机器人控制器3可以通过编程软件实现远程控制,上位工控主机2通过网线连接以太网modbus服务器1,上位工控主机2还通过can总线连接传输网络15分别连接有机器人控制器3、低温等离子发生装置5、工作平台8、监控控制器14,通过上位工控主机2分别发送指令给机器人控制器3、低温等离子发生装置5、工作平台8、监控装置14进行运动轨迹、速度控制、执行相应的动作;其运动机构参数包括等离子喷枪7距待处理工件10表面的距离,工业机器人6具有六旋转自由度,可重复定位精度
±
0.01mm,具备较好的灵活性和精确度。
[0024]
低温等离子发生装置5是将等离子喷枪7通过夹具固定在工业机器人6的腕部上,利用电弧放电原理产生转移等离子电弧形成等离子焰体12通过等离子喷枪7进行喷射,对放置在工作平台8上的待处理工件10表面按照工业机器人6按指定路径运动的同时实时控制工艺参数信息进行活化处理;内部等离子plc控制器51实现等离子电弧输入电流521启停开断、气体流量76和功率控制,通过数据采集卡、等离子a/d转换电路的a/d、d/a转换控制等离子plc控制器51,能实现低温等离子发生装置5开关和模拟量的控制。
[0025]
监控装置14是将光纤束传感探头13通过夹具固定在工业机器人6腕部等离子喷枪7的一侧面间隔预定距离的位置,用于检测等离子喷枪7所喷射出的等离子焰体12的光振幅(例如强度、亮度等)的可能变化,并将检测结果经过高速的光电探测器1415将光振幅转化为成比例关系的光电流,再由前置的信号调理放大电路1416、a/d转换电路1417转化为电压信号反馈给监控plc控制器141,固化在监控plc控制器141中的程序按电压信号强、弱态势将检测结果显示在触摸屏144和触摸显示屏533上,当检测结果符合程序中预设的报警数值时、监控装置14发出报警信息。
[0026]
can总线连接传输网络15是由can总线通过光纤中继器i、光纤中继器ii连通光纤进行数据网络传输,其光纤输出的末端通过can/usb模块将can总线连接传输网络15连接至上位工控主机2;由于can总线传输距离短,本装置在构建传输网络时使用光纤网络来增加数据传输网络的传输距离,再通过光纤中继器ii将can总线信号与光纤信号相互转换,连通can总线与光纤网络、再由can/usb模块连接光纤中继器i与上位工控主机2。
[0027]
can总线在传输机器人控制器3、低温等离子发生装置5、工作平台8、监控装置14运行上传汇总数据时,光纤中继器ii将can信号转变为光纤信号、并传递给光纤中继器i,光纤中继器i将光纤信号转化成can信号,can信号再经过can/usb模块处理后传输给上位工控主机2;作为下位机的机器人控制器3、低温等离子发生装置5、工作平台8、监控装置14运行发生故障报警或操作人员手动操作时,控制机器人控制器3、低温等离子发生装置5、工作平台8、监控装置14启停指令传递方式则反之。
[0028]
如图3所示,本实用新型低温等离子发生装置5包括等离子喷枪7、工业气源单元9、
阴阳极线及气体管路11、等离子plc控制器51、输入电流521,阴阳极线及气体管路11内包裹有中心电极阳极线111、外壳无电位电极阴极线112、气体管路113,工业气源单元9通过输气管路92连接有气体流量传感器91。
[0029]
等离子喷枪7包括外壳无电位电极72以及螺纹连接安装在其顶部的喷嘴77,外壳无电位电极72内套装设有中心电极71,中心电极71的外侧还套装设有一绝缘套管73,外壳无电位电极72侧边设置与中心电极71形成等离子电弧75的气体流量76气旋的气体管道74,喷嘴77内的等离子电弧75对待处理工件10表面喷射进行活化处理;中心电极71、外壳无电位电极72分别通过中心电极阳极线111、外壳无电位电极阴极线111与中心电极输出566、外壳无电位电极输出565电性连接,气体管道74通过气体管路113气体流量传感器91管路连接。
[0030]
如图4至图6所示,本实用新型监控装置14包括光纤束传感探头13、监控plc控制器141、电源管理模块142、接口模块143、触摸屏144、报警显示模块145、数据存储器146、反馈控制回路147、采样频率调节回路148、信号发生器1411、光纤声光调制器驱动器1412、光纤声光调制器1413、光纤连接器ii 1414、光电探测器1415、信号调理放大电路1416、a/d转换电路1417、光纤连接器i 1418;
[0031]
监控装置14相互连接关系为:监控plc控制器141由一台西门子s7-300系列的plc(cpu315-2dp)为主、组成模块式plc作为整个监控装置14的主控制器,分别与信号发生器1411、电源管理模块142、接口模块143、触摸屏144、报警显示模块145、数据存储器146、反馈控制回路147、采样频率调节回路148、a/d转换电路1417电性连接,信号发生器1411、光纤声光调制器驱动器1412、光纤声光调制器1413、光纤连接器ii 1414、光电探测器1415、信号调理放大电路1416、a/d转换电路1417顺次电性连接,光纤声光调制器1413、光纤连接器i 1418、光纤束传感探头13顺次电性连接,反馈控制回路147与信号调理放大电路1416电性连接,采样频率调节回路148与a/d转换电路1417电性连接,电源管理模块142分别与信号发生器1411、光纤声光调制器驱动器1412、光纤声光调制器1413、光纤连接器ii 1414、光电探测器1415、信号调理放大电路1416、a/d转换电路1417、触摸屏144、报警显示模块145、数据存储器146、反馈控制回路147、采样频率调节回路148电性连接。
[0032]
监控装置14的工作过程:高精度信号发生器1411依靠串口通信的方式,通过监控plc控制器141的控制界面实时调节监控plc控制器141输出信号的频率、相位和死区时间,信号发生器1411输出信号给光纤声光调制器驱动器1412,使其能用模拟开关输出14128实现高频载波信号和脉冲信号的数字幅度键控调制的射频信号、)经匹配电路加载于光纤声光调制器1413的压电换能器上,激发相同频率的超声波耦合入声光介质;超声波对声光介质的光学折射率进行周期性调制,形成折射率光栅。
[0033]
等离子焰体12的光振幅经耦合光路将光传输到光纤束传感探头13的入射光纤,所传输的光有一部分经反射面反射至接收光纤,等离子焰体12的光振幅经耦合光路将光传输光纤束传感探头13的接收光纤,接收光纤将所接收到的光信号经由光纤连接器i 1418传送至光纤声光调制器1413中,光信号的光束通过介质时即发生相互作用而改变光的传播方向即产生衍射,使衍射光强度在时域上随外部调制信号周期性变化,实现对输入连续光的脉冲调制。
[0034]
经过脉冲调制的连续光信号经由光纤连接器光纤连接器ii 1414传送至光电探测
器1415中,经过高速的光电探测器1415将光振幅转化为成比例关系的光电流,再由前置的信号调理放大电路1416、a/d转换电路1417转化为电压信号反馈给监控plc控制器141,固化在监控plc控制器141中的程序按电压信号强、弱态势将检测结果显示在触摸屏144和触摸显示屏533上,当检测结果符合程序中预设的报警电压信号数值时、报警显示模块145发出报警信息。
[0035]
接口模块143作为监控装置14的节点与can总线电性连接,接口模块143还与低温等离子发生装置5电性连接,用于接收电流传感器556、电压传感器557实时监测采集的电压和电流信号大小、以及气体流量传感器91实时监测采集的气流量大小等各种参数信息;数据存储器146是将规定采样时间内的光振幅转化为电压信号实时数据存储在存储器内,存储数据还有电流传感器556、电压传感器557实时监测采集的电压和电流信号大小、以及气体流量传感器91实时监测采集的气流量大小等各种参数信息。
[0036]
监控plc控制器141定时中断和采样频率调节电路148对采样时间的设定,将设定的采样时间发送给ad转换电路1417,然后通过采样频率调节电路148控制ad转换电路1417在采样时间内工作。在采样过程中需要针对瞬时光强值选择不同的采样量程测量,而且要在μs的时间内完成量程的切换。在信号调理放大电路1416中设置了多个精密采样电阻实现采样量程的选择,ad转换电路1417在每一次ad转换后的数据送到监控plc控制器141中与提前设置的各量程阈值比较,通过反馈控制电路147实现采样量程的快速切换。
[0037]
本实用新型光纤声光调制器驱动器1412包括脉冲输入信号14121、dc-dc电路14122、脉冲调整电路14123、振荡电路14124、控制器调整电路14125、2ask调制电路14126、功率放大电路14127、前置放大器14128、阻抗匹配网络电路14129、功率输出14130;
[0038]
光纤声光调制器驱动器1412相互连接关系为:dc-dc电路14122与脉冲调整电路14123电性连接,dc-dc电路14122、振荡电路14124、2ask调制电路14126、前置放大器14128、功率放大电路14127、阻抗匹配网络电路14129、功率输出14130顺次电性连接,脉冲输入信号14121、脉冲调整电路14123、控制器调整电路14125、2ask调制电路14126顺次电性连接。
[0039]
光纤声光调制器驱动器1412的工作过程:光纤声光调制器驱动器1412是为声光调制器提供具有特定频率的载波调幅信号,其输入端是信号发生器1411隔一端时间向脉冲调整电路14123发送输出脉冲输入信号14121的方波信号给脉冲调整电路14123,脉冲调整电路14123选用与非门实现对调制脉冲控制信号进行调整处理,起着陡化调制脉冲信号和滤除信号尖峰的作用;dc/dcdc-dc电路14122是指直流/直流转换电路,其目的是作为供电电压进行电压的变换;
[0040]
振荡电路14124选用有源晶振产生高频信号作为驱动器的载波频率,其作用是产生一个中心频率为100mhz的标准频率;控制器调整电路14125使调幅信号的调制深度和增益可根据声光调制器件的特性和现场实际的要求进行适当的调节;2ask调制电路14126通过输入的调制脉冲信号对高频振荡器产生的高频载波信号进行幅度调制,实现调制脉冲信号对载波信号的幅度调制,其输出的已调制信号加载到声光调制器的电声换能器产生超声波实现对激光强度的调制;功率放大电路14126由偏置电路、输入阻抗匹配网络、输出阻抗匹配网络和大功率晶体管组成,主要是对前置放大器输出的调幅信号进行功率放大,并向声光调制器提供足够的驱动信号;
[0041]
前置放大器14128电路起到缓冲和隔离作用,能输出一定电压幅度送入功率放大
器电路,经调制后的调幅信号幅度很小,不能驱动功率放大器,所以需要对此调幅信号进行线性放大;阻抗匹配网络电路14129是为了功率的最大传输,若负载阻抗不满足共轭匹配的条件,就在负载和信号源之间加一个阻抗匹配网络,将负载阻抗变换为信号源阻抗的共轭,实现阻抗匹配,实现了功率输出14130的功率最大限度的传输给负载。
[0042]
本实用新型光纤声光调制器1413是一种重要的光调制器件,它基于体波声光互作用原理,同时具备光脉冲幅度调制和光频移的能力,载波功率信号(驱动器件工作的射频信号,其频率为器件的工作频率)经匹配电路加载于压电换能器上,激发相同频率的超声波耦合入声光介质;超声波对声光介质的光学折射率进行周期性调制,形成折射率光栅;输入连续光经过光纤透镜1导入折射率光栅中发生衍射,根据声光效应入射光子、衍射光子与声子之间的能量守恒定律,超声波频率被叠加到入射光频上,实现声光移频,移频频率在数值上等于器件的载波信号频率;衍射光再通过光纤透镜2导入输出光纤中向后传输;当载波信号受到周期性脉冲调制,介质中的声场形成周期性脉冲序列依次穿越入射光场,使衍射光强度在时域上随外部调制信号周期性变化,实现对输入连续光的脉冲调制。
[0043]
本实用新型光纤束传感探头13结构采用入射和接收光纤同轴排布,具有较小数值孔径和芯径的单模光纤作为入射光纤,具有较大数值孔径和芯径的多模光纤作为接收光纤,且以双层同心方式排列,采用单根单模光纤作为入射光纤,横向分辨力高;采用双层多模光纤作为接收光纤,可提高传感器接收光的能力;内外层接收光纤接收的光振幅信号,经过数据的归一化处理,可补偿等离子焰体12波动和被测等离子焰体12反射能力不同等因素对监测结果的影响;并且光振幅信号经过光纤声光调制器1413连续光的脉冲调制后传送到光电探测器1415上产生光电流,其强度与光振幅信号的强度近似成正比关系。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1