一种太阳能板自动调节装置的制作方法
[0001]
本实用新型属太阳能板领域,尤其涉及一种能自动调节太阳能发电板角度的调节装置。
背景技术:
[0002]
太阳能电池又称为“太阳能芯片”或“光电池”,是一种利用太阳光直接发电的光电半导体薄片。单体太阳能电池不能直接做电源使用,作电源必须将若干单体太阳能电池串、并联连接和严密封装成组件,太阳能电池板一般为更好的采光,多装于建筑顶部,为固定安装,但由于阳光的照射角度在变化,因此不能高效的在日照时段都能采集到太阳能。
技术实现要素:
[0003]
为解决上述问题,本实用新型设计了一种太阳能板自动调节装置,其结构包括: 包括太阳能板自动调节装置、太阳能感控装置;所述太阳能板自动调节装置包括基座、第一电机、第二电机、支架、发电板框架;所述支架装于所述基座上,所述基座底部外圈固于平面轴承上,所述平面轴承外圈为伞齿轮,由所述第一电机轴端固定的伞齿轮带动其转动,所述发电板框架的中轴部有凸起的销,所述销穿过所述支架上端,所述第二电机装于所述支架一侧上部向外支出的安装架上,其轴端带动所述销转动,所述太阳能感控装置包括:方向感应装置、仰角感应装置、plc控制器,所述方向感应装置为正八边形柱,其每个侧面装有光线传感器,所述仰角感应装置是将正八边形柱竖直切去相邻的三个侧面构成的柱体,并以切面为底面,其剩下五个侧面各装有光线传感器;所述光线传感器连接所述plc控制器的输入端,所述plc控制器输出端分别连接所述第一电机、第二电机;所述方向感应装置固定于地面,所述仰角感应装置装于所述安装架上,且其底边的长边方向与所述销方向垂直。
[0004]
较佳的,所述第二电机通过齿轮组带动所述销转动或所述第二电机的轴端与所述销固定。
[0005]
较佳的,所述第一电机、第二电机为步进电机或伺服电机。
[0006]
较佳的,所述平面轴承外圈的伞齿轮与固定于所述第一电机上的伞齿轮的齿数比为45、90、180中的一个。
[0007]
较佳的,所述第二电机的线束穿过所述支架内部,由所述平面轴承圆心导出,使得该线束在第一电机带动平面轴承旋转时,不会造成线束缠绕的问题。
[0008]
较佳的,所述plc控制器的工作流程包括以下步骤:
[0009]
s1.分别对方向感应装置的八个光线传感器、仰角感应装置的五个光线传感器按顺时针进行编号;
[0010]
s2.plc控制器接收方向感应装置的八个光线传感器的光线强度信号,并进行比较,确定光线最强的光线传感器编号,向所述第一电机发出控制指令,使其带动太阳能板自动调节装置转向该光线传感器的方向;plc控制器接收仰角感应装置的五个光线传感器的光线强度信号,并进行比较,确定光线最强的光线传感器编号,向第二电机发出控制指令,
使其带动太阳能板自动调节装置转向该光线传感器的仰角。
[0011]
较佳的,所述plc控制器对所述第一电机、第二电机发出的控制指令,是根据跳变后的光线最强的光线传感器编号减去跳变前的光线最强的光线传感器编号确定的,该差值即所述plc控制器向所述第一电机、第二电机发出的脉冲信号数量。
[0012]
较佳的,一个所述脉冲信号使所述平面轴承或销顺时针转动45
°
,对于第一电机的转动圈数,是由所述平面轴承外圈的伞齿轮与固定于所述第一电机上的伞齿轮的齿数比确定的。
[0013]
本实用新型通过太阳能感控装置将感应到的水平方向和竖直平面的最强光线所在的面传递给plc控制器,由其控制第一电机、第二电机转动,使得太阳能板能始终朝向光照强度最强的平面方向及竖直仰角,让发电板能在日照时段都受到阳光的直射,提高了光伏发电板的发电效率,延长了发电时段,在本领域有显著技术进步。
附图说明
[0014]
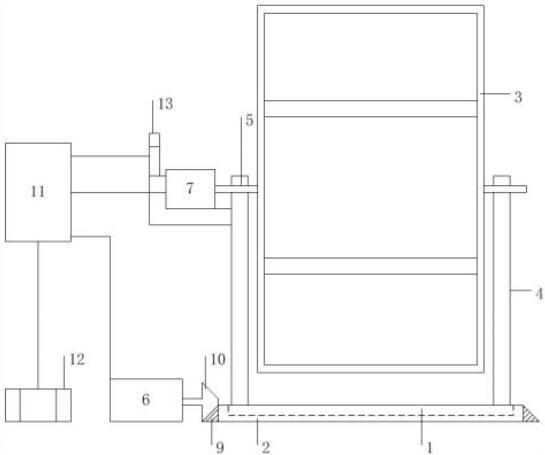
图1为本实用新型第一视角示意图。
[0015]
图2为方向感应装置俯视图。
[0016]
图3为仰角感应装置侧视图。
具体实施方式
[0017]
实施例1
[0018]
如图1所示,本实用新型所述太阳能板自动调节装置,其结构包括:基座1、第一电机6、第二电机7、支架4、发电板框架3;所述支架4装于所述基座1上,所述基座1底部外圈固于平面轴承2上,所述平面轴承2外圈为伞齿轮9,由所述第一电机6轴端固定的伞齿轮10带动其转动,所述发电板框架3的中轴部有凸起的销5,所述销5穿过所述支架4上端,所述第二电机7装于所述支架4一侧上部向外支出的安装架上,其轴端带动所述销5转动;所述太阳能感控装置包括:方向感应装置12、仰角感应装置13、plc控制器11,所述方向感应装置12为正八边形柱,其每个侧面装有光线传感器21,所述仰角感应装置13是将正八边形柱竖直切去相邻的三个侧面构成的柱体,并以切面为底面,其剩下五个侧面各装有光线传感器21;所述光线传感器21连接所述plc控制器11的输入端,所述plc控制器11输出端分别连接所述第一电机6、第二电机7;所述方向感应装置12固定于地面,所述仰角感应装置13装于所述安装架上,且其底边的长边方向与所述销方向垂直,能防止太阳能板遮挡仰角感应装置。
[0019]
更为具体的,所述第二电机7通过齿轮组带动所述销5转动或所述第二电机7的轴端与所述销5固定。
[0020]
更为具体的,所述第一电机6、第二电机7为伺服电机。
[0021]
更为具体的,所述平面轴承2外圈的伞齿轮9与固定于所述第一电机6上的伞齿轮10的齿数比为90。
[0022]
更为具体的,所述第二电机7的线束穿过所述支架4内部,由所述平面轴承2圆心导出,使得该线束在第一电机6带动平面轴承2旋转时,不会造成线束缠绕的问题。
[0023]
更为具体的,所述plc控制器11的工作流程包括以下步骤:
[0024]
s1.分别对方向感应装置12的八个光线传感器21、仰角感应装置13的五个光线传
感器21按顺时针进行编号;
[0025]
s2.plc控制器11接收方向感应装置12的八个光线传感器21的光线强度信号,并进行比较,确定光线最强的光线传感器21编号,向所述第一电机发出控制指令,使其带动太阳能板自动调节装置转向该光线传感器21的方向;plc控制器11接收仰角感应装置13的五个光线传感器21的光线强度信号,并进行比较,确定光线最强的光线传感器21编号,向第二电机发出控制指令,使其带动太阳能板自动调节装置转向该光线传感器21的仰角。
[0026]
更为具体的,所述plc控制器11对所述第一电机、第二电机发出的控制指令,是根据跳变后的光线最强的光线传感器21编号减去跳变前的光线最强的光线传感器21编号确定的,该差值即所述plc控制器11向所述第一电机、第二电机发出的脉冲信号数量,若差值为负则为逆时针旋转。
[0027]
更为具体的,一个所述脉冲信号使所述平面轴承或销顺时针转动45
°
,对于第一电机的转动圈数,是由所述平面轴承外圈的伞齿轮与固定于所述第一电机上的伞齿轮的齿数比确定的。
[0028]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1