一种视觉检测的智能避障循迹系统的制作方法
[0001]
本实用新型涉及一种自动避障循迹系统,具体的说,是一种用在电动小车的智能循迹避障系统。
背景技术:
[0002]
随着家电智能化程度的提高,目前有很多家电如扫地机器人都可实现自动运行,扫地机器人可近似看作一台带有扫地功能的自动运行的小车,在扫地机器人运行到障碍物位置时,需要进行障碍物的躲避。目前避障方式大部分采用超声波的方式进行距离检测,其采用检测模块检测小车前方是否有障碍物,从而实现避障,但其检测范围小,特别是对于较复杂路况,不能做出合理的避障。同时其亦无法按照指定路线精准的控制小车前进方向,给日常使用造成不便。
技术实现要素:
[0003]
本实用新型的目的在于提供一种全新的智能循迹避障系统来解决上述的问题。
[0004]
本实用新型通过如下技术手段来实现:一种视觉检测的智能循迹避障系统,包括主控板、传感器、电机控制单元、电源、无线通信单元、显示单元、视觉检测单元,所述的主控板上设置在小车上,所述的主控板安装有滤波芯片,所述的传感器包括红外巡线传感器和超声波传感器,超声波传感器包括左超声波传感器和右超声波传感器,左超声波传感器和右超声波传感器均通过滤波芯片与主控板连接,所述的红外巡线传感器与主控板数据连接;
[0005]
所述的主控板为树莓派4b主控板,所述的树莓派4b主控板上设置若干接口用以于传感器及电机控制单元进行数据连接;
[0006]
所述的传感器包括避障功能模块及循迹功能模块,所述的避障功能模块包括了超声波传感器、usb摄像头及舵机,所述的超声波传感器、usb摄像头、舵机分别与主控板数据连接,所述的舵机与超声波传感器相连,舵机底部连接在小车前端,所述的摄像头连接在小车后端;
[0007]
所述的循迹功能模块为红外巡线传感器,红外巡线传感器采用四路红外传感器模块,红外巡线传感器设置在小车前进方向的底部;
[0008]
所述的视觉检测单元为usb摄像头和舵机,所述usb摄像头固定在舵机上,舵机转动利用摄像头对前方环境进行监测,获取前方图片数据,主控板将获取的数据进行分析,进行物体识别,并提供前方物体的方位,返回给主控板,并由主控板提供给避障功能模块;
[0009]
所述电机控制单元与小车的驱动电机相连接,所述电机控制单元为tb6612fng电机驱动模块。电机控制单元接收来自主控板的数据,进而控制驱动电机的运作,实现小车行驶及转向。
[0010]
所述的显示单元为oled显示屏,用于显示避障情况及小车状态。
[0011]
在所述的小车上还设置无线通信模块,所述的无线通信模块与主控板数据连接,
所述的无线通信模块采用nrf24l01通信模块。
[0012]
所述的主控板上设置拓展板,所述的拓展板与主控板通过杜邦线连接。
[0013]
所述的电源包括12.6v 2000mah锂电池组及lm7805稳压器,所述的锂电池组的电流经过稳压器后,与电气元件连接并为之供电。
[0014]
本实用新型与现有技术相比,其利用摄像头与超声波模块共同运作来进行相关的避障动作,另外,还设置了循迹模块令用户可以指定小车的运行轨迹,从而对其移动轨迹进行优化,提高其运行效率,其设置的无线通信单元可以实现数据上传,使用户可以通过云平台查看避障情况及小车状态。
附图说明
[0015]
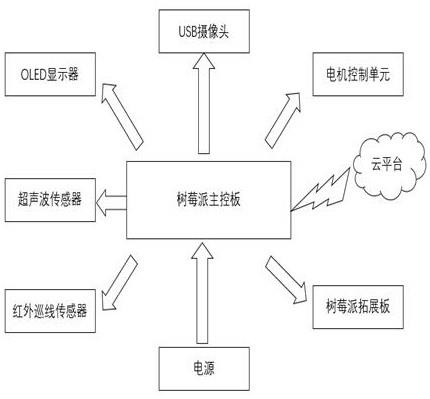
图1为本实用新型结构示意图;
[0016]
图2为本实用新型树莓派接口连接图。
具体实施方式
[0017]
下面结合说明书附图对本实用新型进行进一步详述:
[0018]
本实用新型涉及一种视觉检测的智能循迹避障系统,其包括有:主控板、传感器、电机控制单元、电源、无线通信单元、显示单元、视觉检测单元。主控板内部可编入特定程序用以调整小车运行情况。所述主控板安装在小车上,且所述的主控板上安装有滤波芯片,所述的传感器包括红外巡线传感器和超声波传感器,所述的红外巡线传感器与主控板数据连接并设置在小车前进方向的底部,所述的无线通信单元用于将数据上传云平台,所述的显示单元用于显示避障情况及小车状态。
[0019]
进一步的,所述的主控板为树莓派4b主控板,所述的树莓派4b主控板上设置若干接口用以于传感器及电机控制单元进行数据连接;所述的传感器包括避障功能模块及循迹功能模块,所述的避障功能模块包括了超声波传感器、usb摄像头及舵机,所述的超声波传感器、usb摄像头、舵机分别与主控板数据连接,超声波传感器与usb摄像头分别设置在小车的前端与后端,所述的舵机与小车的转向装置相连接,且所述的usb摄像头设置在舵机上;在进行避障功能时,树莓派会控制usb摄像头和舵机转动对前方环境数据进行分析,并提供前方物体的方位,配合超声波模块对前方距离检测,当检测到的距离小于安全距离时,主控板控制电机控制单元改变小车本体的运动方向,实现躲避障碍物。本实用新型中,所述电机控制单元与小车的驱动电机相连接,所述电机控制单元为tb6612fng电机驱动模块。
[0020]
本实用新型中,所述的无线通信模块与主控板数据连接,所述的无线通信模块采用nrf24l01通信模块。
[0021]
进一步的,在所述的主控板上还可设置拓展板,所述的拓展板与主控板通过杜邦线连接,这样可以保证元器件之间存在着充足的空间,使之不会因为过热而产生故障。
[0022]
所述的电源包括12.6v 2000mah锂电池组及lm7805稳压器,所述的锂电池组的电流经过稳压器后,与电气元件连接并为之供电。
[0023]
具体的,所述的树莓派的3脚与5脚连接超声波传感器的scl脚及sda脚,所述树莓派的15脚连接无线模块的irq脚,树莓派的32脚、36脚、38脚及40脚分别连接循迹模块的x1-x4脚。
[0024]
本实用新型还包括一个显示模块用于显示系统的参数,所述的显示模块为oled显示模块,其质量轻,显示效果好。具体的,所述树莓派的18脚、22脚、24脚及26脚分别连接oled显示模块的d0、d1、dc和cs脚。
[0025]
更具体的,在小车行驶过程中进行避障功能时,首先是由树莓派控制摄像头对前方环境进行检测,程序内部会将监测到的数据进行分析,提供前方物体的方位。通过树莓派的引脚3向scl脚输入至少10us的高电平信号,触发超声波模块的测距功能。测距功能触发后,模块将自动发出 8 个 40khz 的超声波脉冲,并自动检测是否有信号返回,一旦检测到有回波信号则sda脚会输出高电平。通过内部程序控制电机运行状态来调整小车的方位,当前方没有障碍物时,保持直线行驶,如此循环反复,直至结束避障功能。
[0026]
在小车行驶过程中进行循迹功能时,利用物体的反射性质,当红外发射管照射在黑色物体上时表现为接收管的电阻大,通过外接电路就可以读出检测的状态;当照射在白色表面时表现为接收管的电阻较小,即代表电平高低,进而通过内部程序控制电机运行状态来实现循迹。
[0027]
获得距离数据后,将数据以一定的格式储存起来。控制器通过tcp透传协议接入onenet云平台,发送*产品id#鉴权信息#tcp脚本名称(即前面文件)*字符串信息完成通道建立和脚本上传,从而实现数据上传。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1