移动型抗病毒机器人及其控制方法与流程
1.本发明涉及一种移动型抗病毒机器人及其控制方法,更详细地,涉及一种移动型抗病毒机器人及其控制方法,其设有可移动的移动体,以通过移动到相互不同的位置来进行病毒净化。
背景技术:
2.如今,随着工业的发展,环境污染越来越严重,且根据地域特性交通及工厂有较强的集中趋势,因此,大气污染也日益严重。当污染的空气蔓延到普通家庭以及公共设施时,会引发呼吸道疾病和癌症。此外,针对儿童还会引发严重的皮肤疾病以及皮肤癌,且导致空气中的污染病原菌增加。
3.对此,为了净化污染的空气使用了利用静电吸尘方式或过滤方式的空气净化器,然而,一般的空气净化器制作为固定在特定位置来进行动作。此时,用于大空间的空气净化器而言,其效率极低,且为了在大空间净化污染的空气,存在着需要在多个位置放置空气净化器的弊端。此时,持续管理多个空气净化器可能会带来不便,并且,为了购买和维护多个空气净化器,因此,费用方面也存在着需要承担很多费用的弊端。
4.因此,需要一种在大空间也能够有效净化病毒的方案。
技术实现要素:
5.发明所要解决的问题
6.本发明所要解决的技术课题是提供一种设置有可移动的移动体,以通过移动到相互不同的位置来进行病毒净化的移动型抗病毒机器人及其控制方法。
7.用于解决问题的方案
8.一方面,本发明提供一种移动型抗病毒机器人,其设置有移动体,通过上述移动体可进行移动,上述移动型抗病毒机器人可以包括:第一抗病毒部,其设置有引导空气移动的风扇,及用于净化通过上述风扇而移动的空气的净化过滤器;第二抗病毒部,其喷射杀菌溶液,以对任意物体进行杀菌;第三抗病毒部,其设置于移动体的下侧面,以向地面释放紫外线;传感器部,其检测空气的污染度,感测上述移动体移动的方向中存在的对象,且检测上述移动体所处的地点,以生成位置信息;学习部,其学习上述移动体移动而改变的位置信息,并生成用于表示上述移动体可移动的区域的路径模型;以及,控制部,其根据上述污染度控制上述风扇的旋转速度,当感测到上述对象时,根据所感测到的对象的状态设置移动路径,当上述污染度超出预先设置的污染临界范围时,将上述位置信息设置为感兴趣区域,生成与上述路径模型间隔预先设置的距离间距的移动路径,重新生成与之前生成的移动路径间隔特定距离的直线移动路径。
9.并且,针对在生成的移动路径中出现的分支点,上述控制部将移动路径设置为按照预先设置的次数向相同的方向进行旋转,当在上述分支点旋转的次数达到预先设置的次数时,可以将移动路径设置为使上述移动体向其他方向进行旋转。
10.并且,当上述控制部从座位控制系统接收到基于上述移动体所相邻位置的座位信息的喷射信号时,可以控制上述第二抗病毒部喷射杀菌溶液,其中,上述座位控制系统用于判断以空位和使用中的座位表示的店铺的座位状态。
11.并且,当上述控制部感测到上述对象时,上述控制部控制上述移动体停止,且控制为在预先设置的时间间隔后重新进行对上述对象的感测,当重新感测到上述对象时,上述控制部可以控制上述移动体根据预先设置的转向角度进行旋转。
12.并且,从感测到第一对象,使得上述移动体根据预先设置的第一转向角度旋转的地点开始,到感测到第二对象的地点为止,当上述控制部判断为上述移动体的移动距离在预先设置的距离范围内时,可以控制上述移动体根据预先设置的第二转向角度进行旋转。
13.并且,当到达与感兴趣区域的距离间距比预先设置的距离间距更远的地点时,上述控制部可以设置上述移动体根据之前生成的移动路径从该地点移动到感兴趣区域。
14.并且,当到达比上述预先设置的距离间距更远的地点的次数达到预先设置的次数时,上述控制部可以增加特定量的上述预先设置的距离间距。
15.并且,上述控制部将基于所生成的移动路径的分支点中的任一个分支点设置为目标地点,在到达设置为上述目标地点的分支点时,设置为移动至感兴趣区域,且可以将存在于上述移动路径的分支点按照靠近感兴趣区域的顺序依次设置为目标地点。
16.根据本发明的另一方面,提供一种移动型抗病毒机器人的控制方法,其中,上述移动型抗病毒机器人设置有移动体,且通过上述移动体能够进行移动,上述方法可以包括:利用净化过滤器净化通过风扇而移动的空气的步骤,其中,上述风扇旋转以引导空气移动;喷射杀菌溶液以对任意物体进行杀菌的步骤;设置于移动体的下侧面,以向地面释放紫外线的步骤;检测空气的污染度,检测上述移动体所处的地点,以生成位置信息,且感测上述移动体移动的方向中存在的对象的步骤;根据上述污染度控制上述风扇的旋转速度的步骤;学习上述移动体移动而改变的位置信息,并生成用于表示上述移动体可移动的区域的路径模型的步骤;当感测到上述对象时,根据所感测到的对象的状态来设置移动路径的步骤;当上述污染度超出预先设置的污染临界范围时,将上述位置信息设置为感兴趣区域的步骤;以及生成与上述路径模型间隔预先设置的距离间距的移动路径,且重新生成与之前生成的移动路径间隔特定距离的直线移动路径的步骤。
17.并且,在生成呈网格形状的移动路径的步骤中,将基于所生成的移动路径的分支点中的任一个分支点设置为目标地点,在到达设置为上述目标地点的分支点时,设置为移动至感兴趣区域,且可以将存在于上述移动路径的分支点按照靠近感兴趣区域的顺序依次设置为目标地点。
18.并且,当从座位控制系统接收到基于上述移动体所相邻位置的座位信息的喷射信号时,可以执行喷射上述杀菌溶液以对任意物体进行杀菌的步骤,其中,上述座位控制系统用于判断以空位和使用中的座位表示的店铺的座位状态。
19.并且,在生成呈网格形状的移动路径的步骤中,针对所生成的移动路径中出现的分支点,将移动路径设置为按照预先设置的次数向相同的方向进行旋转,当在上述分支点旋转的次数达到预先设置的次数时,可以将移动路径设置为使得上述移动体向其他方向进行旋转。
20.发明效果
21.根据上述的本发明的一方面,提供一种移动型抗病毒机器人及起控制方法,通过设置有可移动的移动体,以移动到相互不同的位置来进行病毒净化。
附图说明
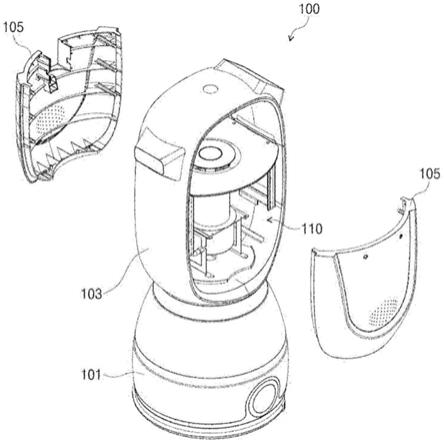
22.图1至图3为根据本发明一实施例的移动型抗病毒机器人的示意图。
23.图4为根据本发明一实施例的移动型抗病毒机器人的控制框图。
24.图5为示出图4的控制部控制抗病毒部的过程的框图。
25.图6为示出图4的控制部控制移动体移动的过程的框图。
26.图7为示出图4的控制部生成路径模型的过程框图。
27.图8至图11为示出图4的抗病毒部的一实施例的示意图。
28.图12及图13为示出图4的控制部所生成的移动路径的一实施例的示意图。
29.图14为根据本发明一实施例的移动型抗病毒机器人的控制方法的顺序图。
具体实施方式
30.以下,将参照附图对本发明进行详细说明,附图将以能够实施本发明的特定实施例作为示例来进行图示。这些实施例将被详细地说明,使得本领域的普通技术人员能够充分地实施本发明。应当理解,本发明的多种实施例虽然相互不同,但没有必要相互排斥。例如,有关一实施例,在不脱离本发明的精神和范围的情况下,本文中所记载的特定形状、结构及特征可以实现为其他实施例。另外,应当理解,在不脱离本发明的精神以及范围的情况下,可以改变各个公开的实施例中的个别构成要素的位置或布置。因此,以下的详细说明不应被理解为限定的含义,当被妥当地说明时,本发明的范围及与权利要求书所主张的内容等同的所有范围仅由权利要求书所限定。附图中相似的附图标记在各种方面表示相同或相似的功能。
31.以下,将参考附图对本发明的优选实施例进行详细地说明。
32.图1至图3为根据本发明一实施例的移动型抗病毒机器人的示意图。
33.移动型抗病毒机器人100可以包括移动体101,因此,移动型抗病毒机器人100通过移动体101进行移动,并且,可以对移动型抗病毒机器人100所在的空间进行空气净化。
34.其中,移动体101可以由移动型抗病毒机器人100控制,以能够进行移动,此时,移动体101可以由移动型抗病毒机器人100控制转向,从而可以转换方向。
35.移动型抗病毒机器人100中可以设置有能够进行旋转的风扇,以便将空气引入到通过至少一个盖子105所形成的内部空间,且移动型抗病毒机器人100中可以安装有净化过滤器,以净化由风扇引入到内部空间的空气。
36.为此,移动体101还可以包括设置为与盖子105结合的主体103,并且,主体103与移动体101可以设置为一体型或可分离的形状。另外,移动体101还可以包括电源供应器,以通过由电源供应器供应的电源进行动作。
37.其中,盖子105可以设置为能够组装到移动体101的主体103的形状,并且,盖子105可以设置有通风口,使得空气流入到通过盖子105所形成的内部空间。
38.另外,内部空间与盖子105可以单独设置,例如,可以利用圆筒形的空气通道等来设置内部空间。
39.如上所述,针对本文中所记载的特定形状、结构和特征等一实施例,在不脱离本发明的精神和范围的情况下,内部空间可以实现为其他实施例。
40.与此相关地地,风扇可以设置在通过盖子105所形成的内部空间的上侧来进行旋转,使得流入到内部空间的空气流出至内部空间的外侧。
41.此时,移动型抗病毒机器人100可以控制空气通过风扇流入到内部空间的下侧或侧面,并且,移动型抗病毒机器人100可以控制流入的空气流经风扇并通过内部空间的上侧流出至外侧。
42.并且,风扇也可以设置在通过盖子105所形成的内部空间的下侧来进行旋转,以使存在于内部空间的空气移动到内部空间的上侧。此时,内部空间还可以设置有空气流入口,使得空气从内部空间的下侧或侧面流入。
43.此时,移动型抗病毒机器人100可以控制风扇使得存在于内部空间的空气通过风扇移动到内部空间的上侧,以及移动至内部空间的上侧的空气流出至内部空间的外侧,据此,移动型抗病毒机器人100可以具有空气从内部空间的下侧或侧面流入到内部空间的效果。
44.此时,风扇的旋转速度可以由移动型抗病毒机器人100来控制。
45.另外,净化过滤器可以设置在通过盖子105所形成的内部空间中。此时,净化过滤器可以设置为捕捉或过滤掉空气中存在的污染物。
46.与此相关地,净化过滤器可以包括以相互不同的形状设置的多个单一过滤器,其中,多个单一过滤器可以设置为,分别捕捉或过滤掉不同的污染物。
47.例如,单一过滤器可以包括:用于捕捉空气中含有的大颗粒灰尘的预滤器(pre filter);用于捕捉空气中含有的恶臭、有害气体或总挥发性有机物(total volatile organic compounds,tvoc)等颗粒的活性碳过滤器;以及用于捕捉空气中含有的2.5微米以下的超细粉尘等颗粒的h13高效空气过滤器(high efficiency particulate air filter,hepa filter),此时,净化过滤器可以设置为包括预滤器、活性碳过滤器以及h13高效空气过滤器的三重过滤器的形状。
48.此种单一过滤器可以设置为网状,以使空气通过且过滤掉污染物,此时,单一过滤器可以为金属材质或合成树脂材质。
49.并且,根据移动型抗病毒机器人100所被驱动的空间特性,净化过滤器也可以使用用于不同用途的相互不同的多个单一过滤器,当然,净化过滤器也可以使用已知的相互不同的多个过滤器。
50.另外,净化过滤器可设置为结合到形成内部空间的盖子105的内侧,并且,净化过滤器也可以以围绕通过盖子105所形成的内部空间的方式进行结合。并且,净化过滤器也可设置在内部空间,使得根据风扇的动作从内部空间的下侧或侧面流入的空气经过净化过滤器。
51.此时,通过盖子105所形成的内部空间可以设置有空心的管状结合体,用于结合净化过滤器,由此,移动型抗病毒机器人100可以控制风扇,使得通过净化过滤器所净化的空气移动到空心的管状结合体的内侧,且位于结合体内侧的已净化的空气排出至通过盖子105所形成的内部空间的外侧。
52.此时,净化过滤器可以设置为可进行更换。
53.另外,移动型抗病毒机器人100可具有杀菌灯,其设于移动体101的下侧面,以向移动体101移动的地面释放紫外线。
54.此时,移动型抗病毒机器人100可以具有在移动体101等待或移动期间利用杀菌灯对地面进行杀菌的效果。
55.其中,杀菌灯可以设置为释放波长为100纳米至280纳米范围内的紫外线,例如,杀菌灯可以使用uv-c紫外线杀菌灯等。
56.移动型抗病毒机器人100还可以包括喷雾器,其对桌子、椅子等物体喷射杀菌溶液。
57.此时,喷雾器可以设置在内部空间的外侧,盖子105还可以设置有单独的孔,使得从喷雾器喷射出的杀菌溶液可以发射至移动型抗病毒机器人100的外侧。此时,喷雾器还可以包括喷嘴,以使杀菌溶液喷射至移动型抗病毒机器人100的外侧,此时,盖子105可以设置有单独的孔来布置喷雾器的喷嘴。
58.并且,当移动型抗病毒机器人100设置有喷雾器,用于对桌子及椅子等物体喷射杀菌溶液时,可以向判断为空位的桌子及椅子等物体喷射杀菌溶液。
59.即,可以理解为,当移动型抗病毒机器人100设置于咖啡店等店铺时,可以向判断为空位的桌子、椅子等喷射杀菌溶液,此时,移动型抗病毒机器人100可以从以无线或有线网络连接的座位控制系统接收杀菌溶液的喷射信号,来喷射杀菌溶液。
60.此时,座位控制系统可以是用于判断以空位和使用中的座位表示的店铺的座位状态的系统,这种座位控制系统可以用与移动型抗病毒机器人100连接的服务器、电脑、移动终端等信息处理装置来代替。
61.与此相关地,喷射信号可以是表示移动型抗病毒机器人100所相邻的座位为空位的信号,为此,移动型抗病毒机器人100可以事先接收表示座位位置的座位信息。
62.由此,移动型抗病毒机器人100可以将移动型抗病毒机器人100所相邻的座位的识别信息传输给座位控制系统,此时,当移动型抗病毒机器人100从座位控制系统接收到针对该座位的喷射信号时,可以喷射杀菌溶液。
63.并且,移动型抗病毒机器人100可以在店铺识别设置在座位上方的天花板、桌子或椅子中至少一个物体的标记物。此时,移动型抗病毒机器人100可以在主体103的一侧设置有二维(2d)相机等,用于识别标记物。
64.例如,对于移动型抗病毒机器人100而言,当店铺的天花板设置有标记物时,为了识别标记物,可以在移动型抗病毒机器人100的主体103的上侧设置2d相机等。
65.其中,设置在天花板、桌子或椅子中至少一个的物体的标记物可以将针对座位的识别信息传输给移动型抗病毒机器人100,因此,移动型抗病毒机器人100可以将识别标记物而生成的针对座位的识别信息传输给座位控制系统,此时,当移动型抗病毒机器人100从座位控制系统接收到针对该座位的喷射信号时,可以喷射杀菌溶液。
66.与此相关地,对于座位控制系统而言,存在于店铺的各个座位可以具有状态转换开关,此时,座位控制系统可以根据用户按下状态转换开关时所产生的状态转换信号来转换座位的状态。
67.例如,座位控制系统可以将座位的初始状态设置为空位状态,当根据用户的输入而产生状态转换信号时,座位控制系统可以相互转换空位状态与使用中的座位状态。
68.此时,状态转换信号可以包括能够区分状态转换开关所在座位的识别信息,由此,座位控制系统可以控制店铺中多个座位中任一个座位的座位状态。
69.并且,座位控制系统还可以利用设置于店铺的拍摄装置来识别客人,此时,可以通过学习客人的行为模式来判断客人所在座位与空位。
70.喷雾器可以设置为根据从外部接收的喷射信号来喷射杀菌溶液,其中,喷射信号可以是利用无线网(wireless fidelity,wi-fi)、蓝牙(bluetooth)等无线网络的信号,喷射信号可以由可连接到无限网路的装置来生成,比如,电脑、智能手机、平板等。
71.此时,移动型抗病毒机器人100可以通过无线网络连接到生成喷射信号的装置。
72.对此,参考图1,可以理解为,移动型抗病毒机器人100中抗病毒部110的前侧设置有喷雾器,参考图2,移动型抗病毒机器人100a也可以在抗病毒部110a的两侧设置有喷雾器,因此,图2可以理解为移动型抗病毒机器人100的其他实施例。
73.据此,对于移动型抗病毒机器人100的喷雾器而言,在不脱离本发明的精神和范围的情况下,本文中所记载的特定形状、结构和特征可以实现为其他实施例。
74.移动型抗病毒机器人100可以设置有污染度检测传感器,从而对随着风扇的旋转而流入内部空间的空气进行污染度检测。
75.为此,移动型抗病毒机器人100可以利用传感器,其中,传感器通过利用光传感器或激光光源等照射光,通过光电二极管等将由空气中含有的细粉尘或超细粉尘散射的光输出为电信号,且根据输出的电信号的大小来判断空气的污染度。
76.并且,移动型抗病毒机器人100可以通过使用检测空气中存在的硫化氢、氨、二氧化碳及甲烷等污染物的浓度的传感器来检测污染度,并且,移动型抗病毒机器人100可以使用检测相互不同物质的浓度的多个传感器来分别检测各个污染物的污染度。
77.此时,污染度检测传感器可以设置为对净化过滤器捕捉空气中含有的污染物之前的空气进行污染度检测。
78.另外,移动型抗病毒机器人100可以设置有对象感测传感器,以发送感测信号,且接收任意对象反射的感测信号来感测对象。
79.其中,对象可以指妨碍移动体101移动的人、墙、桌子等。
80.为此,移动型抗病毒机器人100可以使用一种传感器,其检测从发送超声波、红外线、激光、激光雷达等感测信号的时刻开始,到接收由任意对象反射的感测信号的时刻为止的时间间隔。因此,移动型抗病毒机器人100可以根据所检测的时间间隔来判断与任意对象的距离间距。
81.并且,移动型抗病毒机器人100还可以通过感测围绕移动体101的缓冲器和缓冲器所产生的压力来感测对象。
82.并且,移动型抗病毒机器人100可以将对象感测传感器安装在主体的前表面、下侧、上侧等任意位置,此时,移动型抗病毒机器人100也可以将多个对象感测传感器设置在相互不同的位置。
83.此时,对象感测传感器可以设置为向移动体101所移动的方向发送感测信号,因此,移动型抗病毒机器人100可以感测位于前方的任意对象。
84.另外,移动型抗病毒机器人100可以设置有位置检测传感器,通过检测移动体所在的地点来生成位置信息,此时,移动型抗病毒机器人100可以根据预先设置的时间周期来生
成位置信息。
85.并且,移动型抗病毒机器人100也可以根据预先设置的距离周期来生成位置信息,此时,为了可以判断预先设置的距离周期,移动型抗病毒机器人100控制为根据移动体101移动的速度而适用相互不同的时间周期,从而可以根据特定距离周期来生成位置信息。
86.此时,移动型抗病毒机器人100可以利用全球定位(global position,gps)、全球导航卫星系统(global navigation satellite system,gnss)等技术来检测移动型抗病毒机器人100所在的地点。
87.其中,gnss为一种接收器从卫星接收卫星信号,根据接收到的卫星信号计算与卫星的距离,以判断接收器位置的技术,此时,gnss也使用,利用连续观测站和接收器的距离差及连续观测站的位置信息来修改接收器位置的技术。
88.并且,移动型抗病毒机器人100可以从安装在相互不同位置的多个信号发射器接收各个发射器的信号,并根据接收到的信号强度来计算与发射信号的各个信号发射器的距离,此时,移动型抗病毒机器人100也可以设置为根据由多个信号发射器所计算出的距离之间的差来计算移动型抗病毒机器人100所在的地点。
89.此时,信号发射器可以为发射wi-fi等无线网络信号的装置。
90.移动型抗病毒机器人100可以根据通过污染度检测传感器检测的污染度来控制风扇的旋转速度。
91.为此,移动型抗病毒机器人100可以根据通过污染度检测传感器检测的污染度来判断污染等级,并且,移动型抗病毒机器人100可以根据所判断的污染等级来控制风扇的旋转速度。
92.其中,污染等级可以设置为,根据污染度所表示的数值范围,将污染度分为一个以上的等级。
93.此时,对于污染等级而言,当设有相互不同方式的污染度检测传感器时,可以根据各个污染度检测传感器检测的污染度来分别判断污染等级,移动型抗病毒机器人100可以基于根据相互不同方式的污染度检测传感器检测的污染度来判断的多个污染等级,控制风扇的旋转速度。
94.例如,移动型抗病毒机器人100可以根据多个污染等级中判断为最高等级的污染等级来控制风扇的旋转速度,并且,移动型抗病毒机器人100也可以根据多个污染等级来计算平均污染等级,以根据计算出的平均污染等级来控制风扇的旋转速度。
95.并且,针对以相互不同的方式检测的多个污染度,移动型抗病毒机器人100可以设置针对各个污染度的加权值,此时,移动型抗病毒机器人100可以对以相互不同的方式检测的多个污染度适用各个加权值,以判断各个污染度的污染等级,因此,移动型抗病毒机器人100可以根据多个污染等级中表示最高等级的污染等级来控制风扇的旋转速度。
96.当移动型抗病毒机器人100通过对象感测传感器感测到对象时,可以根据感测到的对象的状态来设置移动路径,并且,移动型抗病毒机器人100可以控制移动体根据所设置的移动路径进行移动。
97.其中,当通过对象感测传感器检测到的与对象的距离间距小于预先设置的临界值时,移动型抗病毒机器人100可以判断为感测到了对象,即,也可以是,当从对象感测传感器发送检测信号的时刻开始,到接收由任意对象反射的感测信号的时刻为止的时间间隔小于
预先设置的临界值时,判断为感测到了对象。
98.并且,当从对象感测传感器检测到的与对象的距离间距大于预先设置的临界值或没有检测到与对象的距离时,移动型抗病毒机器人100则可以判断为未感测到对象。
99.据此,当感测到对象时,移动型抗病毒机器人100可以控制移动体101停止,且移动型抗病毒机器人100可以控制在预先设置的时间间隔后重新感测对象。
100.此时,在移动型抗病毒机器人100感测到对象并控制移动体101停止后,如果从重新感测到了对象,则控制移动体101根据预先设置的转向角度进行旋转。
101.与此相关地,当移动型抗病毒机器人100控制移动体101根据预先设置的转向角度进行旋转时,可以控制移动体101以与之前旋转的方向相同的方向进行旋转。
102.据此,移动型抗病毒机器人100可以对移动体101旋转而改变的方向进行对象的感测,当移动型抗病毒机器人100从改变的方向感测不到对象时,可以控制移动体101向改变的方向移动。
103.例如,当感测到对象时,移动型抗病毒机器人100可以控制移动体101停止,且从移动体101停止的时刻起的特定时间间隔后重新感测对象,当重新感测到对象时,可以控制移动体101向左侧或右侧旋转60度。
104.另外,当移动型抗病毒机器人100对移动体101旋转而改变的方向进行对象的感测并感测到对象时,可以控制在预先设置的时间间隔后重新感测对象,当重新感测到对象时,移动型抗病毒机器人100可以控制移动体101根据预先设置的转向角度进行旋转。
105.与此相关地,从通过对象感测传感器感测到第一对象,使移动体101根据预先设置的第一转向角度旋转的地点开始,到感测到第二对象的地点为止,移动型抗病毒机器人100判断移动体101的移动距离在预先设置的距离范围以内时,可以控制移动体101根据预先设置的第二转向角度进行旋转。
106.例如,当对象感测传感器感测到第一对象时,移动型抗病毒机器人100可以控制移动体101根据一系列的控制过程而旋转60度,且当从移动体旋转60度的地点开始,到感测到第二对象的地点为止,移动体101所移动的距离在预先设置的距离范围内时,移动型抗病毒机器人100可以控制移动体101根据一系列的控制过程而旋转30度。
107.当污染度检测传感器检测的污染度超出预先设置的污染临界范围时,移动型抗病毒机器人100可以将位置检测传感器所检测的现在的位置信息设置为感兴趣区域,且移动型抗病毒机器人100可以根据感兴趣区域重新设置移动路径。
108.与此相关地,当移动型抗病毒机器人100控制移动体101按照预先设置的次数进行旋转时,可以控制移动体101向已设置的感兴趣区域进行移动。
109.为此,移动型抗病毒机器人100可以通过比较位置检测传感器检测的位置信息和设置为感兴趣区域的位置信息,控制移动体101的方向朝感兴趣区域旋转。
110.此时,当在移动体101移动到感兴趣区域的期间,对象感测传感器感测到了任意对象时,移动型抗病毒机器人100可以控制移动体101停止,且移动型抗病毒机器人100可以控制在预先设置的时间间隔后重新感测对象。
111.此时,如果在感测到对象并控制移动体101停止后重新感测到了对象,则移动型抗病毒机器人100可以控制移动体101根据预先设置的转向角度进行旋转,且移动型抗病毒机器人100可以沿着移动体101旋转的方向移动预先设置的临界距离间距。
112.因此,移动型抗病毒机器人100可以通过比较在移动体101按照预先设置的临界距离间距移动的地点所检测到的位置信息和设置为感兴趣区域的位置信息,以控制移动体101的方向朝感兴趣区域进行旋转。
113.另外,当移动型抗病毒机器人100到达指定为感兴趣区域的地点时,可以控制移动体101根据预先设置的转向角度进行旋转。
114.移动型抗病毒机器人100可以学习移动体101沿着移动路径移动而改变的位置信息,并生成用于表示移动体101可移动的区域的路径模型。
115.为此,移动型抗病毒机器人100可以利用分析接收的信息并针对接收的信息生成模型的主成分分析(pricipal components analysis,pca)等无监督学习(unsupervised learning)技术。
116.其中,主成分分析是用于计算最能代表位于以任意维度形成的空间中的多个信息的线或面的技术。
117.因此,移动型抗病毒机器人100可以控制移动体101沿着基于生成的路径模型而设置的移动路径进行移动。
118.此时,移动型抗病毒机器人100可以根据移动体101移动而生成的位置信息中表示最外侧的多个位置信息来生成路径模型。
119.此时,路径模型可以生成为表示可沿着设有移动型抗病毒机器人100的空间的外壁移动的路径。其中,外壁可以指在设有移动型抗病毒机器人100的空间内移动体101可移动的位置中位于最外侧的壁等障碍物。
120.另外,移动型抗病毒机器人100可以生成与路径模型间隔预先设置的距离间距的移动路径,其中,路径模型根据收集的位置信息的外侧来生成。
121.其中,预先设置的距离间距可以设置为表示空气通过移动型抗病毒机器人100而净化的区域,因此,移动型抗病毒机器人100可以生成与所收集的位置信息的外侧间隔特定距离的内侧的移动路径。
122.此时,移动型抗病毒机器人100可以生成与之前生成的移动路径间隔特定距离的直线移动路径。这种情况下,移动型抗病毒机器人100可以在根据外侧的位置信息而生成的移动路径的内侧,生成呈网格形状的移动路径。
123.例如,移动型抗病毒机器人100可以基于以表示外侧的方式生成的第一移动路径来生成第二移动路径,其用于表示与第一移动路径间隔特定距离的直线路径,并且,移动型抗病毒机器人100可以基于第二移动路径来生成第三移动路径,其用于表示与第二移动路径间隔特定距离的直线路径。
124.并且,当移动型抗病毒机器人100判断与所收集的位置信息的外侧间隔特定距离的位置为不可移动的区域时,也能够以使移动体101沿最近的外侧的移动路径移动的方式生成移动路径。
125.因此,移动型抗病毒机器人100可以将移动路径设置为,移动体101交替地移动在以表示所收集的位置信息的外侧的方式生成的移动路径;和在根据外侧的位置信息的移动路径的内侧所生成的移动路径。
126.另外,在网格形状的移动路径中,移动型抗病毒机器人100可以将表示移动体可移动的路径的相互不同的线所重叠的一个点设置为分支点。
127.并且,移动型抗病毒机器人100也可以将移动路径设置为,在所生成的移动路径中出现的分支点,向相同的方向进行旋转并移动,此时,当出现之前移动过的移动路径时,移动型抗病毒机器人100也可以将移动路径设置为向其他方向进行旋转并移动。
128.并且,当移动型抗病毒机器人100判断为在分支点出现的各方向的移动路径为之前移动过的移动路径时,沿着之前移动过的移动路径进行移动,当到达之前没有移动过的移动路径存在的分支点时,将移动路径设置为向该移动路径旋转并移动。
129.为此,移动型抗病毒机器人100可以按照时间顺序储存所生成的位置信息,并且,可以通过比较任意时间内所生成的位置信息和移动路径,来判断出之前移动过的移动路径。
130.并且,针对在生成的移动路径中出现的分支点,移动型抗病毒机器人100也可以将移动路径设置为按照预先设置的次数向相同方向进行旋转,此时,如果在分支点旋转的次数达到预先设置的次数时,移动型抗病毒机器人100可以将移动路径设置为向其他方向进行旋转。
131.另外,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,移动型抗病毒机器人100可以利用基于路径模型的可移动路径。
132.与此相关地,当到达与感兴趣区域的距离间距比预先设置的距离间距更远的地点时,移动型抗病毒机器人100可以设置为根据之前生成的移动路径从该地点移动到感兴趣区域。
133.此时,针对感兴趣区域,当到达比预先设置的距离间距更远的地点的次数达到预先设置的次数时,移动型抗病毒机器人100可以将预先设置的距离间距增加特定量。
134.其中,感兴趣区域可以设置为生成的移动路径中所存在的任意一个点,因此,移动型抗病毒机器人100自感兴趣区域生成一个以预先设置的距离间距为半径的圆,当检测的位置信息脱离所生成的圆时,可以设置为移动至感兴趣区域。
135.此时,当脱离根据预先设置的距离间距的圆的次数达到预先设置的次数时,移动型抗病毒机器人100可以将预先设置的距离间距增加特定量。
136.另外,在可向感兴趣区域移动的一个以上的移动路径中,移动型抗病毒机器人100可以沿着除之前使用过的移动路径之外的一个移动路径进行移动。
137.为此,移动型抗病毒机器人100可以从感兴趣区域识别可移动的相互不同的移动路径的方向,因此,移动型抗病毒机器人100可以依次选择从感兴趣区域识别的移动路径的方向,以移动至相互不同的方向。即,可以理解为,当移动型抗病毒机器人100每次到达任意一个分支点时,依次选择可移动的方向。
138.并且,移动型抗病毒机器人100也可以识别根据感兴趣区域设置的移动路径所出现的分支点,因此,移动型抗病毒机器人100在依次选择从感兴趣区域识别的移动路径的方向的过程中,也可以包括根据感兴趣区域设置的移动路径所识别的分支点来选择移动路径的方向。
139.其中,移动型抗病毒机器人100可以识别沿着感兴趣区域设置的移动路径依次出现的分支点中的第n个分支点,例如,移动型抗病毒机器人100可以在沿着感兴趣区域设置的移动路径所出现的分支点中,将第一次识别到的分支点设置为从感兴趣区域识别的移动路径的方向中的一个方向。
140.并且,当移动型抗病毒机器人100设有感兴趣区域,并设置为从任意地点移动至感兴趣区域时,可以设置为选择移动型抗病毒机器人100的方向旋转的次数最少的移动路径来移动至感兴趣区域。
141.并且,移动型抗病毒机器人100可以将基于生成的移动路径的分支点中的任一个分支点设置为目标地点,且移动型抗病毒机器人100可以设置为,当到达设置为目标地点的分支点时,移动至感兴趣区域。
142.此时,移动型抗病毒机器人100可以将之前设置的移动路径所包含的分支点设置为通过地点,这种情况下,移动型抗病毒机器人100可以将除设置为通过地点的分支点以外的任一个的分支点设置为目标地点。
143.并且,移动型抗病毒机器人100可以将生成的移动路径中所存在的分支点按照靠近感兴趣区域的顺序依次设置为目标地点,并且,移动型抗病毒机器人100也可以将生成的移动路径中所存在的分支点按照远离感兴趣区域的顺序依次设置为目标地点。
144.另外,当设置有多个感兴趣区域时,移动型抗病毒机器人100可以将从任意感兴趣区域移动到其他感兴趣区域。
145.此时,移动型抗病毒机器人100可以将移动路径设置为,沿着与之前移动的移动路径不同的移动路径从任意感兴趣区移动到其他感兴趣区域。
146.并且,移动型抗病毒机器人100可以根据设置为感兴趣区域的时间顺序来选择用于从任意感兴趣区域移动而选择的其他感兴趣区域,移动型抗病毒机器人100也可以根据在感兴趣区域检测到的污染度的大小顺序来依次进行移动的方式,从任意感兴趣区域选择其他感兴趣区域。
147.另外,参考图3,移动型抗病毒机器人100b可以去除设置在主体103内侧的抗病毒部110而组装搁板108等,此时,移动型抗病毒机器人100b也可以用作可自主移动的搁板。
148.图4为根据本发明一实施例的移动型抗病毒机器人的控制框图。
149.移动型抗病毒机器人100可以包括:抗病毒部110、传感器部120、控制部130、学习部140以及储存部150,其中,抗病毒部110可以包括:第一抗病毒部、第二抗病毒部及第三抗病毒部。
150.第一抗病毒部可以设置有能够进行旋转的风扇,以将空气引入到通过至少一个盖子105所形成的内部空间,且第一抗病毒部可以安装有净化过滤器,以净化由风扇引入到内部空间的空气。
151.风扇可以设置在通过盖子105所形成的内部空间的上侧来进行旋转,使得流入到内部空间的空气流出至内部空间的外侧。
152.此时,可以控制第一抗病毒部使得空气通过风扇流入到内部空间的下侧或侧面,并且,可以控制第一抗病毒部使得流入的空气流经风扇并通过内部空间的上侧流出至外侧。
153.并且,风扇也可以设置在通过盖子105所形成的内部空间的下侧来进行旋转,以使存在于内部空间的空气移动到内部空间的上侧。
154.此时,可以控制第一抗病毒部使得存在于内部空间的空气通过风扇移动到内部空间的上侧,且移动至内部空间的上侧的空气流出至内部空间的外侧,据此,第一抗病毒部可以具有空气从内部空间的下侧或侧面流入到内部空间的效果。
155.此时,可以通过控制部130来控制风扇的旋转速度。
156.另外,净化过滤器可以设置在通过盖子105所形成的内部空间中。此时,净化过滤器可以设置为捕捉或过滤掉空气中所存在的污染物。
157.与此相关地,净化过滤器可以包括以相互不同的形状设置的多个单一过滤器,其中,多个单一过滤器可以设置为,分别捕捉或过滤掉不同的污染物。
158.另外,净化过滤器可设置为结合到形成内部空间的盖子105的内侧,并且,净化过滤器也可以以围绕通过盖子105所形成的内部空间的方式进行结合。并且,净化过滤器也可设置在内部空间,使得根据风扇的动作从内部空间的下侧或侧面流入的空气经过净化过滤器。
159.此时,通过盖子105所形成的内部空间可以设置有空心的管状结合体,用于结合净化过滤器,由此,第一抗病毒部中风扇可以被控制为,使得通过净化过滤器所净化的空气移动到空心的管状结合体的内侧,且位于结合体内侧的净化的空气排出至通过盖子105所形成的内部空间的外侧。
160.此时,净化过滤器可以设置为可进行更换。
161.第二抗病毒部可以为对桌子、椅子等物体喷射杀菌溶液的喷雾器。
162.此时,喷雾器可以设置在内部空间的外侧,盖子105还可以设置有单独的孔,使得从喷雾器喷射出的杀菌溶液可以发射至移动型抗病毒机器人100的外侧。此时,喷雾器还可以包括喷嘴,以使杀菌溶液喷射至移动型抗病毒机器人100的外侧,此时,盖子105可以设置有单独的孔来布置喷雾器的喷嘴。
163.第三抗病毒部可以为,设置于移动体101的下侧面,向移动体101所移动的地面释放紫外线的杀菌灯。
164.此时,第三抗病毒部可以具有在移动体101等待或移动期间利用杀菌灯对地面进行杀菌的效果。
165.传感器部120可以设置有污染度检测传感器,从而对随着风扇的旋转而流入内部空间的空气进行污染度检测。
166.此时,污染度检测传感器可以设置为对净化过滤器捕捉空气中含有的污染物之前的空气进行污染度检测。
167.另外,传感器部120可以设置有对象感测传感器,以发送感测信号,且接收任意对象反射的感测信号来感测对象。
168.此时,对象感测传感器可以设置为向移动体101所移动的方向发送感测信号,因此,传感器部120可以感测位于前方的任意对象。
169.另外,传感器部120可以设置有位置检测传感器,通过检测移动体所在的地点来生成位置信息。
170.传感器部120可以在店铺识别设于座位上方的天花板、桌子或椅子中至少一个物体的标记物。此时,传感器部120可以在主体103的一侧设置有2d相机等,用于识别标记物。
171.例如,当店铺的天花板设置有标记物时,为了识别标记物,传感器部120可以在移动型抗病毒机器人100的主体103的上侧设置2d相机等。
172.控制部130可以根据通过污染度检测传感器检测的污染度来控制风扇的旋转速度。
173.为此,控制部130可以根据通过污染度检测传感器检测的污染度来判断污染等级,并且,控制部130可以根据所判断的污染等级来控制风扇的旋转速度。
174.其中,污染等级可以设置为,根据污染度所表示的数值范围,将污染度分为一个以上的等级。
175.此时,对于污染等级而言,当设有相互不同方式的污染度检测传感器时,可以根据各个污染度检测传感器检测的污染度来分别判断污染等级,控制部130可以基于根据相互不同方式的污染度检测传感器检测的污染度所判断的多个污染等级来控制风扇旋转的速度。
176.并且,当抗病毒部110设置有喷雾器,用于对桌子及椅子等物体喷射杀菌溶液时,控制部130可以向判断为空位的桌子及椅子等物体喷射杀菌溶液。
177.即,可以理解为,当移动型抗病毒机器人100设置于咖啡店等店铺时,可以向判断为空位的桌子、椅子等喷射杀菌溶液,此时,控制部130可以控制,从以无线或有线网络连接的座位控制系统接收杀菌溶液的喷射信号,来喷射杀菌溶液。
178.为此,控制部130可以事先接收用于表示座位位置的座位信息。
179.由此,控制部130可以将移动型抗病毒机器人100所相邻的座位的识别信息传输给座位控制系统,此时,当控制部130从座位控制系统接收到针对该座位的喷射信号时,可以喷射杀菌溶液。
180.并且,当店铺的天花板设有标记物,且传感器部120识别到标记物时,控制部130可以根据该标记物生成针对座位的识别信息,控制部130可以把提取的识别信息传输给座位控制系统中,此时,当控制部130从座位控制系统接收到对该座位的喷射信号时,可以控制为喷射杀菌溶液。
181.当通过对象感测传感器感测到对象时,控制部130可以根据感测到的对象的状态来设置移动路径,并且,控制部130可以控制移动体根据所设置的移动路径进行移动。
182.据此,当感测到对象时,控制部130可以控制移动体101停止,且控制部130可以控制在预先设置的时间间隔后重新感测对象。
183.此时,在感测到对象并控制移动体101停止后,如果从重新感测到了对象,则控制部130可以控制移动体101根据预先设置的转向角度进行旋转。
184.与此相关地,当控制部130控制移动体101根据预先设置的转向角度进行旋转时,可以控制移动体101与之前旋转的方向相同的方向进行旋转。
185.据此,控制部130可以对移动体101旋转而改变的方向进行对象的感测,当控制部130从改变的方向感测不到对象时,可以控制移动体101向改变的方向进行移动。
186.另外,当对移动体101旋转而改变的方向进行对象的感测并感测到对象时,控制部130可以控制在预先设置的时间间隔后重新感测对象,且当重新感测到对象时,控制部130可以控制移动体101根据预先设置的转向角度进行旋转。
187.与此相关地,从通过对象感测传感器感测到第一对象,使得移动体101根据预先设置的第一转向角度旋转的地点开始,到感测到第二对象的地点为止,控制部130判断移动体101的移动距离在预先设置的距离范围以内时,可以控制移动体101根据预先设置的第二转向角度进行旋转。
188.当通过污染度检测传感器检测的污染度超出预先设置的污染临界范围时,控制部
130可以将位置检测传感器检测到的现在的位置信息设置为感兴趣区域,且控制部130可以根据感兴趣区域重新设置移动路径。
189.与此相关地,当控制部130控制移动体101按照预先设置的次数进行旋转时,可以控制移动体101向已设置的感兴趣区域进行移动。
190.为此,控制部130可以通过比较位置检测传感器检测的位置信息和设置为感兴趣区域的位置信息,来控制移动体101的方向朝感兴趣区域旋转。
191.此时,如果在移动体101移动到感兴趣区域的期间,对象感测传感器感测到了任意对象,则控制部130可以控制移动体101停止,且控制部130可以控制在预先设置的时间间隔后重新感测对象。
192.此时,如果在感测到对象并控制移动体101停止后,重新感测到了对象,则控制部130可以控制移动体101根据预先设置的转向角度进行旋转,且控制部130可以沿着移动体101旋转的方向移动预先设置的临界距离间距。
193.因此,控制部130可以通过比较在移动体101按照预先设置的临界距离间距移动的地点所检测的位置信息和设置为感兴趣区域的位置信息,以控制移动体101的方向朝感兴趣区域进行旋转。
194.另外,当到达指定为感兴趣区域的地点时,控制部130可以控制移动体101根据预先设置的转向角度进行旋转。
195.学习部140可以学习移动体101沿着移动路径移动而改变的位置信息,并生成用于表示移动体101可移动的区域的路径模型。
196.为此,学习部140可以利用分析接收的信息并针对接收的信息生成模型的主成分分析(pricipal components analysis,pca)等无监督学习(unsupervised learning)技术。
197.由此,控制部130可以基于生成的路径模型生成移动路径,并且,控制部130可以控制移动体101根据生成的移动路径进行移动。
198.并且,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,控制部130可以利用基于路径模型的可移动路径。
199.与此相关地,学习部140可以根据移动体101移动而生成的位置信息中表示最外侧的多个位置信息来生成路径模型。
200.另外,控制部130可以生成与路径模型间隔预先设置的距离间距的移动路径,其中,路径模型根据收集的位置信息的外侧来生成。此时,可以理解为,生成移动路径是生成移动型抗病毒机器人100根据路径模型所移动的路径。
201.控制部130可以生成与之前生成的移动路径间隔特定距离的直线移动路径。此时,控制部130可以在根据外侧的位置信息而生成的移动路径的内侧,生成呈网格形状的移动路径。
202.并且,控制部130也可以将移动路径设置为,在所生成的移动路径中出现的分支点,向相同的方向进行旋转并移动,此时,当出现之前移动过的移动路径时,控制部130也可以将移动路径设置为向其他方向进行旋转并移动。
203.并且,当控制部130判断为在分支点出现的各方向的移动路径为之前移动过的移动路径时,沿着之前移动过的移动路径进行移动,当到达之前没有移动过的移动路径存在
的分支点时,将移动路径设置为向该移动路径旋转并移动。
204.为此,控制部130可以控制按照时间顺序储存所生成的位置信息,并且,控制部130可以通过比较任意时间内所生成的位置信息和移动路径,来判断出之前移动过的移动路径。
205.并且,针对在生成的移动路径中出现的分支点,控制部130也可以将移动路径设置为按照预先设置的次数向相同的方向进行旋转,此时,如果在分支点旋转的次数达到预先设置的次数时,控制部130可以将移动路径设置为向其他方向进行旋转。
206.另外,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,控制部130可以利用基于路径模型的可移动路径。
207.与此相关地,当到达与感兴趣区域的距离间距比预先设置的距离间距更远的地点时,控制部130可以设置为根据之前生成的移动路径从该地点移动到感兴趣区域。
208.此时,当脱离根据预先设置的距离间距的圆的次数达到预先设置的次数时,控制部130可以将预先设置的距离间距增加特定量。
209.另外,在可向感兴趣区域移动的一个以上的移动路径中,控制部130可以控制为沿着除之前使用过的移动路径之外的一个移动路径进行移动。
210.为此,控制部130从感兴趣区域识别可移动的相互不同的移动路径的方向,因此,控制部130可以依次选择从感兴趣区域识别的移动路径的方向,以向相互不同的方向移动的方式生成移动路径。
211.并且,控制部130也可以识别沿着感兴趣区域设置的移动路径所出现的分支点,因此,控制部130在依次选择从感兴趣区域识别的移动路径的方向的过程中,也可以包括根据感兴趣区域设置的移动路径所识别的分支点来选择移动路径的方向。
212.其中,控制部130可以识别沿着感兴趣区域设置的移动路径依次出现的分支点中的第n个分支点。
213.并且,对于控制部130而言,当设有感兴趣区域,并设置为从任意地点移动至感兴趣区域时,可以设置为选择移动型抗病毒机器人100的方向旋转的次数最少的移动路径来移动至感兴趣区域。
214.并且,控制部130可以将基于生成的移动路径的分支点中的任一个分支点设置为目标地点,且控制部130可以设置,当到达设置为目标地点的分支点时,移动至感兴趣区域。
215.此时,控制部130可以将之前设置的移动路径中所包含的分支点设置为通过地点,这种情况下,控制部130可以将除设置为通过地点的分支点之外的任一个的分支点设置为目标地点。
216.并且,控制部130可以将生成的移动路径中所存在的分支点按照靠近感兴趣区域的顺序设置为目标地点,并且,控制部130也可以将生成的移动路径中所存在的分支点按照远离感兴趣区域的顺序设置为目标地点。
217.储存部150可以储存学习部140所生成的路径模型,为此,储存部150可以储存传感器部120所检测到的位置信息。
218.并且,储存部150可以储存控制移动体101或抗病毒部110所需的控制命令等。
219.因此,储存部150也可以储存在控制部130中所执行的控制过程、控制结果等,并且,储存部150也可以储存传感器部120所检测到的信息。
220.图5为示出图4的控制部控制抗病毒部的过程的框图。
221.参考图5,传感器部120可以设置有污染度检测传感器,从而对随着风扇的旋转而流入内部空间的空气进行污染度检测。
222.因此,控制部130可以根据通过污染度检测传感器检测的污染度来控制风扇的旋转速度。
223.为此,控制部130可以根据通过污染度检测传感器检测的污染度来判断污染等级,并且,控制部130可以根据所判断的污染等级来控制风扇的旋转速度。
224.其中,污染等级可以设置为,根据污染度所表示的数值范围将污染度分为一个以上的等级。
225.此时,当设有相互不同方式的污染度检测传感器时,可以根据各个污染度检测传感器检测的污染度来分别判断污染等级,控制部130可以基于根据相互不同方式的污染度检测传感器检测的污染度来判断的多个污染等级,控制风扇的旋转速度。
226.与此相关地,储存部150可以储存控制抗病毒部110所需的控制命令等,并且,储存部150也可以储存在控制部130中执行的控制过程、控制结果等,储存部150也可以储存传感器部120检测的信息。
227.另外,可以通过控制部130来控制风扇的旋转速度。
228.图6为示出图4的控制部控制移动体移动的过程的框图。
229.参考图6,传感器部120可以设置有对象感测传感器,以发送感测信号,且接收任意对象反射的感测信号来感测对象。
230.此时,对象感测传感器可以设置为向移动体101所移动的方向发送感测信号,因此,传感器部120可以感测位于前方的任意对象。
231.因此,当通过对象感测传感器感测到对象时,控制部130可以根据感测到的对象的状态来设置移动路径,并且,控制部130可以控制移动体根据所设置的移动路径进行移动。
232.此时,当感测到对象时,控制部130可以控制移动体101停止,且控制部130可以控制在预先设置的时间间隔后重新感测对象。
233.并且,在感测到对象并控制移动体101停止后,如果从重新感测到了对象,则控制部130可以控制移动体101根据预先设置的转向角度进行旋转。
234.与此相关地,当控制部130控制移动体101根据预先设置的转向角度进行旋转时,可以控制移动体101与之前旋转的方向相同的方向进行旋转。
235.据此,控制部130可以对移动体101旋转而改变的方向进行对象的感测,当控制部130从改变的方向感测不到对象时,可以控制移动体101向改变的方向进行移动。
236.另外,当对移动体101旋转而改变的方向进行对象的感测并感测到对象时,控制部130可以控制在预先设置的时间间隔后重新感测对象,且当重新感测到对象时,控制部130可以控制移动体101根据预先设置的转向角度进行旋转。
237.与此相关地,从通过对象感测传感器感测到第一对象,使得移动体101根据预先设置的第一转向角度旋转的地点开始,到感测到第二对象的地点为止,控制部130判断移动体101的移动距离在预先设置的距离范围以内时,可以控制移动体101根据预先设置的第二转向角度进行旋转。
238.图7为示出图4的控制部生成路径模型的过程框图。
239.参考图7,传感器部120可以设置有位置检测传感器,通过检测移动体所在的地点来生成位置信息。
240.因此,学习部140可以学习移动体101沿着移动路径移动而改变的位置信息,并生成用于表示移动体101可移动的区域的路径模型。
241.为此,学习部140可以利用分析接收的信息并针对接收的信息生成模型的主成分分析(pricipal components analysis,pca)等无监督学习(unsupervised learning)技术。
242.与此相关地,储存部150可以储存学习部140所生成的路径模型,为此,储存部150可以储存传感器部120所检测到的位置信息。
243.因此,控制部130可以控制移动体101沿着基于生成的路径模型而设置的移动路径进行移动。
244.并且,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,控制部130可以利用基于路径模型的可移动路径。
245.图8至图11为示出图4的抗病毒部的一实施例的示意图。
246.抗病毒部110还可以包括喷雾器,其对桌子、椅子等物体喷射杀菌溶液。
247.与此相关地,参考图8,可以理解为,移动型抗病毒机器人100中抗病毒部110的前侧设置有喷雾器115,参考图9,可以理解为,移动型抗病毒机器人100中抗病毒部110的两侧设置有喷雾器115。
248.此时,喷雾器115可以设置在内部空间的外侧,盖子105还可以设置有单独的孔,使得从喷雾器115喷射出的杀菌溶液可以发射至移动型抗病毒机器人100的外侧。此时,喷雾器115还可以包括喷嘴,以使杀菌溶液喷射至移动型抗病毒机器人100的外侧,此时,盖子105可以设置有单独的孔来布置喷雾器115的喷嘴。
249.并且,当移动型抗病毒机器人100设置有喷雾器115,用于对桌子及椅子等物体喷射杀菌溶液时,可以向判断为空位的桌子及椅子等物体喷射杀菌溶液。
250.即,可以理解为,当移动型抗病毒机器人100设置于咖啡店等店铺时,可以向判断为空位的桌子、椅子等喷射杀菌溶液,此时,移动型抗病毒机器人100可以从以无线或有线网络连接的座位控制系统接收杀菌溶液的喷射信号,来喷射杀菌溶液。
251.喷雾器115可以设置为根据从外部接收的喷射信号来喷射杀菌溶液,其中,喷射信号可以是利用无线网(wireless fidelity,wi-fi)、蓝牙(bluetooth)等无线网络的信号,喷射信号可以由可连接到无限网路的装置来生成,比如,电脑、智能手机、平板等。
252.此时,移动型抗病毒机器人100可以通过无线网络连接到生成喷射信号的装置。
253.据此,对于喷雾器115而言,在不脱离本发明的精神和范围的情况下,本文中所记载的特定形状、结构和特征可以实现为其他实施例。
254.另外,参考图10,可以通过虚线确认空气移动的大致方向,其中,空气通过设置在抗病毒部110上侧的风扇111而移动。
255.为此,抗病毒部110可以设置有能够进行旋转的风扇111,以便将空气引入到通过至少一个盖子105所形成的内部空间117,并且,抗病毒部110可以安装有净化过滤器113,以净化由风扇111引入到内部空间117的空气。
256.风扇111可以设置在通过盖子105所形成的内部空间117的上侧来进行旋转,使得
流入内部空间117的空气向内部空间117的外侧流出。
257.此时,抗病毒部110可以控制空气通过风扇111流入到内部空间117的下侧或侧面,并且,抗病毒部110可以控制流入的空气经过风扇111并通过内部空间117的上侧向外侧流出。
258.并且,风扇111也可以设置在通过盖子105所形成的内部空间117的下侧来进行旋转,使得存在于内部空间117的空气移动到内部空间117的上侧。
259.此时,抗病毒部110可以控制为,存在于内部空间117的空气通过风扇111移动到内部空间117的上侧,并且,移动到内部空间117的上侧的空气向内部空间117的外侧流出,因此,抗病毒部110可以具有空气从内部空间117的下侧或侧面流入到内部空间117的效果。
260.此时,可以通过控制部130来控制风扇111的旋转速度。
261.另外,净化过滤器113可以设置在通过盖子105所形成的内部空间117中。此时,净化过滤器113可以设置为捕捉或过滤掉空气中所存在的污染物。
262.与此相关地,净化过滤器113可以包括以相互不同的形状设置的多个单一过滤器,其中,多个单一过滤器可以设置为,分别捕捉或过滤掉不同的污染物。
263.例如,单一过滤器可以包括:用于捕捉空气中含有的大颗粒灰尘的预过滤器(pre filter);用于捕捉空气中含有的恶臭、有害气体或总挥发性有机物(total volatile organic compounds,tvoc)等颗粒的活性碳过滤器;以及用于捕捉空气中含有的2.5微米以下的超细粉尘等颗粒的h13高效空气过滤器(high efficiency particulate air filter,hepa filter),此时,净化过滤器可以设置为包括预滤器、活性碳过滤器以及h13高效空气过滤器的三重过滤器的形状。
264.此种单一过滤器可以设置为网状,使空气通过且过滤掉污染物,此时,单一过滤器可以为金属材质或合成树脂材质。
265.并且,根据移动型抗病毒机器人100所被驱动的空间特性,净化过滤器也可以使用用于不同用途的相互不同的多个单一过滤器,当然,净化过滤器也可以使用已知的相互不同的多个过滤器。
266.与此相关地,参考图11,可以确认相互不同的多个单一过滤器113a、113b、113c,抗病毒部110可以设置为,使通过风扇111的旋转而移动的空气经过相互不同的多个单一过滤器113a、113b、113c。
267.另外,净化过滤器113可设置为结合到形成内部空间117的盖子105的内侧,并且,净化过滤器113也可以以围绕通过盖子105所形成的内部空间117的方式进行结合。并且,净化过滤器113也可设置在内部空间117,使根据风扇111的动作从内部空间117的下侧或侧面流入的空气经过净化过滤器113。
268.此时,通过盖子105所形成的内部空间117可以设置有空心的管状结合体,用于结合净化过滤器113,由此,抗病毒部110可以控制风扇111,使得通过净化过滤器113所净化的空气移动到空心的管状结合体的内侧,且位于结合体内侧的已净化的空气排出至通过盖子105所形成的内部空间117的外侧。
269.此时,净化过滤器113可以设置为可进行更换。
270.并且,移动型抗病毒机器人100还可以包括喷雾器115,其对桌子、椅子等物体喷射杀菌溶液。
271.此时,喷雾器115可以设置在内部空间的外侧,盖子105还可以设置有单独的孔,使得从喷雾器115喷射出的杀菌溶液可以发射至移动型抗病毒机器人100的外侧。此时,喷雾器115还可以包括喷嘴,以使杀菌溶液喷射至移动型抗病毒机器人100的外侧,此时,盖子105可以设置有单独的孔来布置喷雾器115的喷嘴。
272.并且,当移动型抗病毒机器人100设置有喷雾器115,用于对桌子及椅子等物体喷射杀菌溶液时,可以向判断为空位的桌子及椅子等物体喷射杀菌溶液。
273.即,可以理解为,当移动型抗病毒机器人100设置于咖啡店等店铺时,可以向判断为空位的桌子、椅子等喷射杀菌溶液,此时,移动型抗病毒机器人100可以从以无线或有线网络连接的座位控制系统接收杀菌溶液的喷射信号,来喷射杀菌溶液。
274.另外,移动型抗病毒机器人100可具有杀菌灯,其设于移动体101的下侧面,以向移动体101所移动的地面释放紫外线。
275.此时,移动型抗病毒机器人100可以具有在移动体101等待或移动期间利用杀菌灯对地面进行杀菌的效果。
276.图12及图13为示出图4的控制部所生成的移动路径的一实施例的示意图。
277.与此相关地,学习部140可以学习移动体101沿着移动路径移动而改变的位置信息,并生成用于表示移动体101可移动的区域的路径模型。
278.由此,控制部130可以基于生成的路径模型来生成移动路径,并且,控制部130可以控制移动体101根据生成的移动路径进行移动。
279.并且,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,控制部130可以利用基于路径模型的可移动路径。
280.与此相关地,学习部140可以根据移动体101移动而生成的位置信息中表示最外侧的多个位置信息来生成路径模型。
281.另外,控制部130可以生成与路径模型间隔预先设置的距离间距的移动路径,其中,路径模型根据收集的位置信息的外侧而生成。此时,可以理解为,生成移动路径是生成移动型抗病毒机器人100根据路径模型所移动的路径。
282.控制部130可以生成与之前生成的移动路径间隔特定距离的直线移动路径。此时,控制部130可以在根据外侧的位置信息而生成的移动路径的内侧,生成呈网格形状的移动路径。
283.并且,控制部130也可以将移动路径设置为,在所生成的移动路径中出现的分支点,向相同的方向进行旋转并移动,此时,当出现之前移动过的移动路径时,控制部130也可以将移动路径设置为向其他方向进行旋转并移动。
284.并且,当控制部130判断为在分支点出现的各方向的移动路径为之前移动过的移动路径时,沿着之前移动过的移动路径进行移动,当到达之前没有移动过的移动路径存在的分支点时,将移动路径设置为向该移动路径旋转并移动。
285.为此,控制部130可以控制按照时间顺序储存所生成的位置信息,并且,控制部130可以通过比较任意时间内所生成的位置信息和移动路径,来判断出之前移动过的移动路径。
286.并且,针对在生成的移动路径中出现的分支点,控制部130也可以将移动路径设置为按照预先设置的次数向相同的方向进行旋转,此时,如果在分支点旋转的次数达到预先
设置的次数时,控制部130可以将移动路径设置为向其他方向进行旋转。
287.另外,当设置有感兴趣区域时,为了从其他区域移动到感兴趣区域,控制部130可以利用根据路径模型的可移动路径。
288.与此相关地,当到达与感兴趣区域的距离间距比预先设置的距离间距更远的地点时,控制部130可以设置为根据预先生成的移动路径从该地点移动到感兴趣区域。
289.此时,当脱离根据预先设置的距离间距的圆的次数达到预先设置的次数时,控制部130可以将预先设置的距离间距增加特定量。
290.另外,在可向感兴趣区域移动的一个以上的移动路径中,控制部130可以控制沿着除之前使用过的移动路径之外的一个移动路径进行移动。
291.为此,控制部130从感兴趣区域识别可移动的相互不同的移动路径的方向,因此,控制部130可以依次选择从感兴趣区域识别的移动路径的方向,以向相互不同的方向移动的方式生成移动路径。
292.并且,控制部130也可以识别沿着感兴趣区域设置的移动路径所出现的分支点,因此,控制部130在依次选择从感兴趣区域识别的移动路径的方向的过程中,也可以包括根据感兴趣区域设置的移动路径所识别的分支点来选择移动路径的方向。
293.其中,控制部130可以识别沿着感兴趣区域设置的移动路径所依次出现的分支点中的第n个分支点。
294.并且,对于控制部130而言,当设有感兴趣区域,并设置为从任意地点移动至感兴趣区域时,可以设置为选择移动型抗病毒机器人100的方向旋转的次数最少的移动路径来移动至感兴趣区域。
295.并且,控制部130可以将基于生成的移动路径的分支点中的任一个分支点设置为目标地点,且控制部130可以设置为,当到达设置为目标地点的分支点时,移动至感兴趣区域。
296.此时,控制部130可以将之前设置的移动路径中所包含的分支点设置为通过地点,这种情况下,控制部130可以将除设置为通过地点的分支点之外的任一个的分支点设置为目标地点。
297.并且,控制部130可以将生成的移动路径中所存在的分支点按照靠近感兴趣区域的顺序设置为目标地点,并且,控制部130也可以将生成的移动路径中所存在的分支点按照远离感兴趣区域的顺序设置为目标地点。
298.储存部150可以储存学习部140所生成的路径模型,为此,储存部150可以储存传感器部120所检测到的位置信息。
299.并且,储存部150可以储存控制移动体101或抗病毒部110所需的控制命令等。
300.因此,储存部150也可以储存在控制部130中所执行的控制过程、控制结果等,并且储存部150也可以储存传感器部120所检测到的信息。
301.图14为根据本发明一实施例的移动型抗病毒机器人的控制方法的顺序图。
302.根据本发明一实施例的移动型抗病毒机器人的控制方法是通过与图1所示的移动型抗病毒机器人100实质相同的结构进行,因此,针对与图1的移动型抗病毒机器人100相同的构成要素将赋予相同的附图标记,并不再赘述。
303.移动型抗病毒机器人的控制方法可以包括:利用净化过滤器进行净化的步骤600;
对物体进行杀菌的步骤610;释放紫外线的步骤620;感测对象的步骤630;控制风扇的旋转速度的步骤640;生成路径模型的步骤650;根据对象的状态来设置移动路径的步骤660;设置为感兴趣区域的步骤670;以及重新生成移动路径的步骤680。
304.利用净化过滤器进行净化的步骤600可以为利用净化过滤器将通过风扇移动的空气进行净化的步骤,其中,风扇为了引导空气移动而旋转。
305.对物体进行杀菌的步骤610可以为喷射杀菌溶液以对任意物体进行杀菌的步骤。
306.释放紫外线的步骤620可以为从移动体的下侧面朝地面释放紫外线的步骤。
307.感测对象的步骤630可以为检测空气的污染度,检测移动体所在的地点以生成位置信息,且对移动体移动的方向中存在的对象进行感测的步骤。
308.控制风扇的旋转速度的步骤640可以为根据污染度控制风扇的旋转速度的步骤。
309.生成路径模型的步骤650可以为学习移动体移动而改变的位置信息,生成用于表示移动体能够移动的区域的路径模型的步骤。
310.根据对象的状态来设置移动路径的步骤660可以为,当感测到对象时,根据所感测到的对象的状态来设置移动路径的步骤。
311.设置为感兴趣区域的步骤670可以为,当污染度超出预先设置的污染临界范围时,将位置信息设置为感兴趣区域的步骤。
312.重新生成移动路径的步骤680可以为,生成与路径模型间隔预先设置的距离间距的移动路径,重新生成与之前生成的移动路径间隔特定距离的直线移动路径的步骤。
313.以上虽参考实施例来进行了说明,但应当可以理解本发明所属领域的普通技术人员可以在不脱离权利要求书中记载的本发明的思想及领域的范围内,可以对本发明进行多种修改和变更。
314.附图标记说明:
315.100:移动型抗病毒机器人;
316.101:移动体;
317.103:主体;
318.105:盖子;
319.111:风扇;
320.113:净化过滤器;
321.115:喷雾器;
322.117:内部空间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1