由监控器管理自主停车机械手队列的方法与流程
由监控器管理自主停车机械手队列的方法
1.本发明涉及自动停车场系统的领域,该自动停车场系统具有高储存强度,从而使得可以优化对具有各种形状的区域的使用。
2.传统的常规停车场浪费了大量的空间。停车空间通常比车辆严格所需的空间大得多。这使驾驶员更容易操纵并且一旦汽车停放后允许车门打开。此外,常规的停车场较深并且天花板较高以允许驾驶员和行人四处走动。
3.这就是正在开发无人驾驶停车方案和自动停车场系统的原因。自动停车场系统限制了常规停车场设施特有的空间损失。自动机械系统接管车辆并且将车辆运输至车辆的停放空间,然后关于取回,当驾驶员来取回他的汽车时,自动汽车移动系统将汽车还给驾驶员。因此,为停放而提供的空间要小得多并且可以优化交通车道。此外,自动停车场内没有行人走动,这使得可以加强使车辆在接收区与停车区之间移动的自主设备的使用安全性。驾驶员在停车场的入口处的开阔的且光线充足的气闸室中存入以及取出他的车辆:因此,驾驶员不必行走穿过通常令人不舒服的空走道来寻找他的汽车。
4.全自动化的停车设施已经是已知的,其中,机械手将车辆提升至起始位置,然后运输车辆并且在目的地位置处将车辆下放。因此,这些运输机械手可以提升车辆并且自动地在取车区与下放区之间运输车辆。作为变型,存在运输机械手,其中可运输的框架构成放置车辆的下放区,使得运输机械手可以将框架上的车辆运输至下放区。
5.为了允许操作使用这种类型的自动停车,自主设备必须能够通过障碍地图和配装至自主设备项目中的每个自主设备项目的传感器来解决障碍物检测的问题。
6.车辆定位功能由技术解决方案提供,这些解决方案配合以实现连续运行的稳健性:计程定位、匹配占用网格的定位以及在当前图像与适合于特定需求的图像数据库之间匹配的定位。
7.自主车辆的导航问题涉及控制致动器沿着给定的轨迹、可能保持在容许的轨迹上以避免地图上未标明的障碍。
8.车辆的下放和取车轨迹通常基于三个螺旋和可能的两个圆弧(如果达到最大挠度),以创建具有连续曲率的轨迹。
9.这些解决方案适合于每个停车机械手的单独管理,从而确保了预定的行程。最近,还已经提出部署以合作的方式工作的机械手队列。
现有技术
10.例如,已知的中国专利cn109403690a描述了一种自动车辆转运系统,该系统包括以下步骤:
[0011]-与使用者建立交互关系;
[0012]-获取使用者的停车请求,并且发送用于将使用者的车辆装载并且运输至使用者的停车空间的装载和运输装置。
[0013]
装载和运输装置将使用者的车辆自动地装载并且运输成停放在指定的停车空间中;获取使用者的取车请求,以及将用于装载和运输使用者的车辆的装载和运输装置发送
至指定的停车空间。该装置将使用者的车辆自动地装载并且运输成停放在指定的取车位置处。自动车辆运输和转运系统包括装载和运输装置、多装载和运输装置任务调度系统、车载自动导航硬件平台和软件系统、系统转运站以及人机交互子系统,其中,装载和运输装置为停车机械手。
[0014]
另一现有技术专利us2018004202描述了一种机械手调度请求系统,该系统提供了使用者界面,使用者可以通过该界面发送服务请求以使用至少一个“机械手即服务”(raas)。机械手队列可以由一组同类机械手或一组异类机械手组成。服务请求不会指定特定的机械手队列来执行所请求的服务。机械手调度请求系统可以确定最优机械手队列(或多个机械手队列的最优组合)来执行所请求的服务,然后请求队列管理系统从确定的机械手队列中选择一个或更多个机械手来执行所请求的服务。
[0015]
专利fr3073769涉及一种包括下述各者的停车机械手:用于运输机动车辆的可调节高度的运输平台、用于使运输平台的高度相对于交通表面移动的移动装置、以及用于控制移动装置以便在车辆已经装载于运输平台上之后使运输平台相对于交通表面从运输平台的车辆被装载于运输平台上所处的装载位置移动至车辆被运输所处的运输位置的控制装置,运输位置位于装载位置上方,使得相对于交通表面,运输平台的高度高于装载位置。
[0016]
专利us2014365258中描述了另一解决方案,作业管理系统包括定义平面图的地图、一组虚拟作业位置和一组与虚拟作业位置相关联的一个或更多个虚拟作业操作。系统自动地确定实际位置和作业请求的实际作业操作,并且基于所选移动机械手的当前状态和/或当前配置智能地选择合适的移动机械手来处理每个作业请求。系统还向选定的移动机械手发送命令以使移动机械手自动地驱动实际作业位置、自动地执行实际作业操作,或两者兼有。
[0017]
还知道下述文章的教示:durrant-whyte,hugh f.,daniel pagac,ben rogers,michael stevens和graeme nelmes.“field and service applications-an autonomous straddle carrier for movement of shipping containers-from research to operational autonomous systems(现场和服务应用-针对运输集装箱的移动的自主跨运载体-从研究到操作的自主系统).”ieee robotics&automation magazine 14(2007):14-23,该文章描述了用于在港口环境中移动运输集装箱的自主跨运推车(autostrad)的开发和实现。在该文章中,描述了车辆和控制、导航、安全和驾驶功能,这些功能允许自主操作。实现完整系统的描述还解决了操作安全、规划和操作规划、码头起重机与道路运输车辆的接口的问题。
[0018]
现有技术的缺点
[0019]
在现有技术的解决方案中,每个机械手在车辆的装载点与下放点之间接收移动指令,并且要么根据由传感器获取的地理位置数据和环境数据来局部且完全自主地计算其轨迹,要么借助于由与机械手进行通信的服务器的计算机执行的处理来计算其轨迹。
[0020]
该解决方案对于有限的车流——其中,停车场的组织也很简单——来说是令人满意的。它允许抵达或离开的车辆依次移动,可能在若干机械手并行工作的情况下允许抵达或离开的车辆依次移动。
[0021]
然而,这些解决方案不可能通过优化协同作业的机械手的运动的策略来应对大的车流。
[0022]
本发明提供的解决方案
[0023]
本发明的目的是通过提出一种用于由监控器管理自主停车机械手队列的方法来弥补这些缺点,其特征在于:
[0024]-每个自主机械手包括用于存储停车空间的数字地图的存储器和计算机、以及地理定位装置、环境传感器、以及用于与所述监控器进行远程通信的装置,
[0025]-所述监控器包括用于存储停车空间的数字地图的存储器和计算机、以及用于与所述机械手进行远程通信、记录所述机械手中的每个机械手的唯一标识符的装置、以及用于计算所述自主机械手的轨迹的计算机,所述方法包括以下步骤:
[0026]-由所述监控器计算多个动作的间歇步骤,每个动作包含数字消息,这些数字消息包括与所述自主机械手中的一个自主机械手的标识符相关联的动作标识符、一个或更多个任务的指定以及至少一个起点或终点的指定,
[0027]-针对所述动作中的每个动作计算包含数字消息的至少一个任务的间歇步骤,所述任务的数字消息包括与所述自主机械手中的一个自主机械手的标识符相关联的操作的指定,
[0028]-由监控器对由所述机械手传输的数字消息进行情景获取,所传输的数字消息包含机械手的所述唯一标识符、所述机械手的时间标记的地理位置数据,以及在适用的情况下包含任务的执行状态,
[0029]-由监控器对来自外围设备的数字消息进行情景获取,
[0030]-一系列任务或动作的定期重新计算,
[0031]-数字动作消息的定期传输,
[0032]-所述机械手中的每个机械手基于活动任务消息、本地地理位置信息及其环境传感器的状态来计算用于这些致动器的命令。
[0033]
因此,机械手不被视为完全独立的单元,而是作为工作效率更高的队列。
[0034]
有利地,所述动作还包括优先级指示,并且该方法包括基于所述优先级指示来重新计算动作和任务的调度的情景步骤。
[0035]
优选地,停车空间的所述数字地图被划分成表面单元,每个表面单元包含信号标,信号标的状态sem(x,y)可以是“空闲”、“为机械手i保留”、“被机械手i占用”、“不可达”。
[0036]
其中,x、y表示表面单元的重心。
[0037]
所述“空闲”状态对应于由任何机械手可达的单元。所述“为机械手i保留”状态仅授权机械手i到达并且禁止其他机械手到达和预约。所述“被机械手i占用”状态是指机械手i的动态足迹的全部或部分侵犯了表面单元的全部或部分。动态足迹被理解为机械手的物理足迹增加了距离裕度并且根据机械手的速度在机械手i的移动方向上投射。“忙碌”状态禁止所有其他机械手到达和预约。所述“不可达”状态禁止所有机械手到达和/或预约。
[0038]
所述监控器负责根据每个机械手的时间标记的地理位置数据来更新所有信号标的状态。例如,监控器可以将“为机械手i保留”状态分配给与用于执行其任务的机械手i的轨迹相对应的所有信号标sem(x,y)。
[0039]
本发明的非限制性示例的详细描述
[0040]
参照附图阅读本发明的非限制性示例的以下详细描述,将更好地理解本发明,在附图中:
[0041]
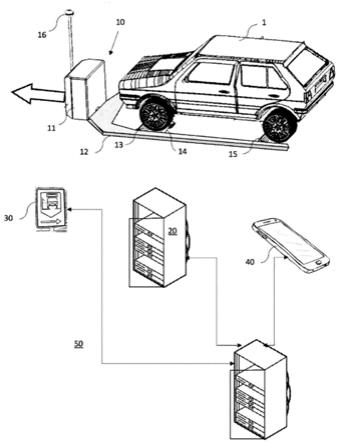
图1示出了根据本发明的系统的示意图。
[0042]
本发明涉及对机械手队列的管理,该机械手队列的动作由监控器进行协调。本发明更特别地涉及下述各者之间的分离:
[0043]-计算移动策略并且优化机械手队列的动作,这仅由监控器执行。
[0044]-由已经被分配了由监控器所传输的行动的机械手执行该行动,该行动由监控器以简短数字消息的形式进行传输,这些数字消息包括与所述自主机械手中的一个自主机械手的标识符相关联的动作标识符、一个或更多个任务的指定以及至少一个起点或终点的指定。
[0045]-由每个机械手对信息进行情景传输,从而允许监控器重新评估行动。
[0046]
系统的一般描述
[0047]
该系统包括一系列的代客泊车机械手(10),代客泊车机械手(10)能够将其自身定位成使用相对于纵梁(12)铰接的臂(13、14、15)系统来夹持汽车(1)的轮。
[0048]
专利申请ep3297876a1中描述了这种机械手的示例。然而,该文献中描述的解决方案与本发明的不同之处在于,在该专利中,铰接臂从在汽车下方滑动的框架朝向外部延伸,而在关于图1所描述的示例中,两个纵梁(12)在车辆的两侧延伸并且具有向内延伸的铰接臂(13至15)。该解决方案使移动具有非常低的离地间隙的车辆更容易。
[0049]
每个代客泊车机械手(10)具有机动单元(11),机动单元(11)与环境传感器(16)例如激光雷达或多向相机以及传感器比如计程传感器、用于探测障碍物的超声波传感器、地理定位装置等相关联。
[0050]
代客泊车机械手(10)还包括用于控制各种致动器(臂(13至15)的移动、侧梁(12)的提升)的计算机和用于使单元(11)根据来自传感器的环境数据和来自通过电子消息与机械手队列通信的监控器(20)的指令进行运动的马达。
[0051]
每个代客泊车机械手(10)与唯一的数字标识符相关联,以允许通过由监控器(20)执行的计算机处理进行识别以及由监控器向代客泊车机械手(10)发送与动作有关的消息。
[0052]
一般操作原理
[0053]
每个代客泊车机械手(10)包括计算机资源以根据接收到的指令控制动作的顺序,例如:
[0054]-接收车辆(1):控制机械手(10)的单元(11)的移动以使侧构件(12)沿着车辆定位,控制臂(13至15)的移动。
[0055]-沿着理论轨迹移动:一方面基于轨迹并且基于来自传感器的信息对单元(11)的马达进行控制,以在考虑到障碍物和局部状况的情况下控制运动。
[0056]
监控器(20)根据从外围设备收集数字信息的服务管理器(50)的指令而连续地计算必须由停车空间上可用的代客泊车机械手(10)中的每个代客泊车机械手执行的任务,从而优化机械手队列的动作,外围设备比如为:
[0057]-位于车辆接收区中的接收终端(30)。
[0058]-例如从车主发送取回他的车辆的消息的智能手机(40)。
[0059]-来自专用监控界面的消息。
[0060]
服务管理器(50)计算最适宜存储车辆或待存储车辆的行程并且将行程以用于代客泊车机械手(10)的动作的形式传输至监控器(20)。监控器将这些动作转换成任务并且将
任务传输至代客泊车机械手(10),以优化装载抵达接收区的车辆的代客泊车机械手(10)的可用性、要被移动至回收区的车辆的装载,以及优化停车区中的车辆的移动,以重新组织车辆的位置来增加存储密度并且重新定位车辆使得在取回日期临近时更容易到达车辆。该信息被传输至监控器(20),监控器(20)将任务分配给代客泊车机械手(10)并且验证代客泊车机械手(10)的确认,以及在必要的情况下与服务管理器(50)对话以报告任何不可用性并且命令新一系列动作的计算。
[0061]
监控器(20)和服务管理器(50)可以结合在单个计算机设备项目中。替代性地,服务管理器(50)可以被若干监控器(20)共用,每个监控器控制一专用停车空间。
[0062]
通信协议
[0063]
通信协议使得对若干机械手分发车辆移动命令以及管理机械手队列成为可能。该协议基于通信服务(api)来添加或查询任务状态,以确保与停车场中存在的所有机械手的通信,以及与服务的其余部分、特别是停车场的调度系统(50)进行通信。
[0064]
监控器(20)管理代客泊车机械手(10)队列并且计算以下两种类型的数字命令:
[0065]-动作:动作表示意在用于机械手的高级指令。动作具有惟一标识号(uuid),从而允许在不同行为之间进行交换。例如,“将车从地方a移动至地方b”,“去往地方c”。
[0066]-任务:任务表示初级的机械手指令。动作通常可以分解成若干任务。
[0067]
任务的一些示例:
[0068]-装载:命令机械手装载车辆的任务。例如,该任务的属性为待装载的车辆的坐标。
[0069]-装载移动:命令机械手与装载在其平台上的车辆移动的任务。例如,该任务的属性为移动轨迹的起点的坐标(隐式地表示机械手的当前位置)和终点的坐标、或者连续的移动区段。
[0070]-卸载:命令机械手卸载车辆并且然后移动机械手的任务。例如,该任务的属性为卸载点的坐标(隐式地表示机械手的当前坐标)和移动轨迹的终点的坐标、或者连续的移动区段。
[0071]-卸载移动:命令机械手在没有车辆的情况下移动的任务。例如,该任务的属性为移动轨迹的起点的坐标(隐式地表示机械手的当前位置)和终点的坐标、或者连续的移动区段。
[0072]-去往电池再充电位置:命令机械手朝向电池再充电区移动。例如,该任务的属性为起点的坐标(隐式地表示机械手的当前坐标)和移动轨迹的终点(再充电点的位置)的坐标、或者连续的移动区段。
[0073]
系统管理器(50)具有可用于与监控器(20)讨论动作的调用语法,语法包括:
[0074]
[post]
[0075]-发送所述动作
[0076]
[get]
[0077]-/actions:所有可用动作的列表
[0078]-/actions/current:返回正在进行的动作
[0079]-/actions/{uuid}:通过uuid标识符返回动作
[0080]
[put]
[0081]-/actions/[uuid]/cancel:取消动作(如果动作还没有开始)
[0082]-修改动作的优先级
[0083]
代客泊车机械手(10)队列管理器和任务状态
[0084]
监控器(20)将由系统管理器(50)传输的动作分解成意在用于机械手的任务。
[0085]
监控器(20)将基于由系统监控器(50)传输的信息来管理机械手的可用性。
[0086]
如果没有机械手(10)可用,则任务由监控器(20)保留直至机械手(10)可用于接受任务。超过确定时间段后,监控器(20)将信息传输至系统监控器(50),系统监控器(50)重新计算新的选项。
[0087]
代客泊车机械手(10)配置成一次仅处理一项工作。然而,代客泊车机械手(10)可以接收要依次执行的任务列表。
[0088]
代客泊车机械手的任务状态为:
[0089]-待执行
[0090]-运行
[0091]-执行
[0092]-中止
[0093]
监控器(20)从队列中的每个代客泊车机械手(10)中检索当前任务的状态,评估相应动作的状态并且将其传输至系统监控器(50)。
[0094]
可以与服务的其他部分通信的系统管理器(50)和/或监控器(20)的动作状态为:
[0095]-等待可用的机械手
[0096]-分配给由其标识符指定的代客泊车机械手(这将替代“待执行”状态)-要求人为干预
[0097]-中止
[0098]-取消
[0099]
监控器(20)基于相应任务的状态来评估动作的状态。
[0100]
动作的优先级管理
[0101]
系统监控器(50)为每个动作设置0与1000之间的优先级(1000为最高优先级)。
[0102]
只要动作还没有开始,则监控器(50)保留修改优先级的可能性(通常为提高优先级)。
[0103]
监控器(20)确保首先执行具有最高优先级的任务。
[0104]
链接的动作
[0105]
一些动作(母动作)必须在另一动作(子动作)之前执行,例如在一辆车必须移动以便能够进入另一辆车的情况下。
[0106]
母动作应在子动作之前被执行。监控器(20)必须管理动作的执行顺序以保证该约束。链式动作可以由一个或更多个机械手执行。
[0107]
在这种情况下,监控器(20)可以同时向若干机械手发送以在若干机械手之间分配任务以便正确地执行动作。
[0108]
与地理数据库的集成
[0109]
服务管理器(50)通过从外部服务检索存储每个车辆的位置的标识符来构造每个动作。当接收到动作时,监控器(20)从标识符中检索具有相同服务的位置的坐标。
[0110]
多机械手的功能性
[0111]
为了管理在存储区中同时移动的若干代客泊车机械手(10),存储区已经被划分成分开的表面单元,每个表面单元包括信号标,信号标的状态sem(x,y)可以是“空闲”、“为机械手i保留”、“被机械手i占用”或者“不可达”。
[0112]
所述“空闲”状态对应于由任何机械手可达的单元。所述“为机械手i保留”状态仅授权机械手i到达并且禁止其他机械手到达和预约。所述“被机械手i占用”状态是指机械手i的动态足迹的全部或部分侵犯了表面单元的全部或部分。动态足迹被理解为机械手的物理足迹增加了距离裕度并且根据机械手的速度在机械手i的移动方向上投射。“忙碌”状态禁止所有其他机械手到达和预约。所述“不可达”状态禁止所有机械手到达和/或预约。
[0113]
所述监控器负责根据每个机械手的时间标记的地理位置数据来更新所有信号标的状态。因此,监控器(20)为每个机械手预留必要的空间来执行机械手的任务或机械手的操纵。
[0114]
当移动机械手时,监控器(20)检查即将要被机械手占用的每个表面单元是否为“空闲”或“为机械手i保留”并且如果必要的话修改其状态,以便机械手执行其动作。
[0115]
在任务经过未经授权的表面单元的情况下:
[0116]-要么监控器(20)能够绕过表面单元提出执行任务的另一路径,
[0117]-或者任务将被监控器(20)暂停,直至当前任务完成或表面单元被释放为止。
[0118]-或者机械手前进至未经授权的表面单元的入口并且等待未经授权的表面单元被释放。
[0119]
监控器(20)删除/取消动作会导致相关表面单元的释放。
[0120]
一旦机械手已经过表面单元,则机械手回到空闲状态,以便另一机械手可以到达该单元。
[0121]
如果任务被机械手中止,则监控器(20)将寻找另一可用的机械手来执行该任务并且完成相关的动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1