一种智能堆高机的控制系统及控制方法与流程
1.本发明涉及控制技术领域,尤其涉及一种智能堆高机的控制系统及控制方法。
背景技术:
2.智能堆高机(automated guided vehicle),即自动导引小车,在现在的物流仓库中被使用的越来越频繁,相较于传统堆垛机来说,智能堆高机有着更好的柔性,可以根据仓库出库量的多少灵活调整数量,同时,智能堆高机行驶速度快、噪音小,有着更高效的运输能力。
3.然而,现有的智能堆高机位置控制是利用固定在智能堆高机工作场合周围的传感器来上传智能堆高机的位置信息,或者是通过固定在智能堆高机上的传感器上传的智能堆高机位置信息。这些传感器包括超声传感器、视觉传感器、红外传感器、激光传感器等。
4.中国专利第cn 109279543 b号提供的agv控制方法的基本步骤是跟踪控制子系统从磁导轨感知子系统获取传感器信息,确定车身姿态与相对位置,并结合从速度和角度检测子系统中获取的舵轮旋转角速度和方向角度,确定叉车式agv当前运行状态,根据运行状态使用不同模式跟踪磁导轨。
技术实现要素:
5.本发明所要解决的首要技术问题在于提供一种智能堆高机的控制方法。
6.本发明所要解决的另一技术问题在于提供一种智能堆高机的控制系统。
7.为实现上述技术目的,本发明采用以下技术方案:
8.一种智能堆高机的控制方法,包括:s1:控制模块获取智能堆高机的当前位置信息和目标位置信息;s2:控制模块根据当前位置信息和目标位置信息,计算出智能堆高机的驱动轮线速度,并发送给执行机构;s3:执行机构根据驱动轮线速度控制智能堆高机的驱动轮。
9.其中较优地,控制模块根据当前位置信息和目标位置信息计算出智能堆高机的驱动轮线速度的步骤,包括:
10.根据当前位置信息和目标位置信息,计算出智能堆高机的线速度vp;
11.根据智能堆高机线速度vp计算出驱动轮线速度vd。
12.其中较优地,智能堆高机线速度vp,是通过改变智能堆高机的加加速度获得的。
13.其中较优地,将智能堆高机从当前位置行走到目标位置的时间设为时间t,在初始时间和时间t之间设置多个拐点时刻,在拐点时刻,智能堆高机的加加速度发生改变。
14.其中较优地,在相邻的拐点时刻之间,加加速度为常数。
15.其中较优地,加加速度为绝对值相等的多个常数,或者为0。
16.其中较优地,智能堆高机线速度从起始速度加速到运行速度所需时间为t2,在t2的1/2处的时间点为t1,从初始时间到时间点t1之前的加加速度,与在t1
‑
t2之间的加加速度,其中一个正值,另一个为与正值的绝对值相同的负值。
17.根据所述当前位置信息和所述目标位置信息,计算所述路线中每一点的所述智能堆高机的偏转角速度w。
18.其中较优地,根据智能堆高机线速度vp,以及所述偏转角速度w,计算出智能堆高机的支点轮旋转半径r1,
19.然后根据支点轮旋转半径r1计算智能堆高机的驱动轮的转向角α,
20.最后根据驱动轮的旋转半径r计算出驱动轮线速度vd。
21.一种智能堆高机的控制系统,其特征在于,包括:
22.检测模块,由多个传感器组成,用于获取智能堆高机的位置信息和姿态信息;
23.控制模块,基于检测模块获取的信息,计算出智能堆高机的驱动轮线速度控制指令,并向执行机构发出指令,以控制智能堆高机的驱动轮的线速度,
24.所述控制模块根据权利要求1
‑
6中任一项所述的智能堆高机的控制方法来计算所述驱动轮线速度,或者根据权利要求7
‑
8中任一项所述的智能堆高机的控制方法来计算所述驱动轮线速度和转向角。
25.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1
‑
8中任一项所述的智能堆高机的控制方法中的各步骤。
26.本发明与现有技术相比,有益效果在于:本发明可以使智能堆高机的运行速度更平顺,控制精度更高。
附图说明
27.图1为智能堆高机的协同路径规划示意图;
28.图2为本发明智能堆高机的操作流程示意图;
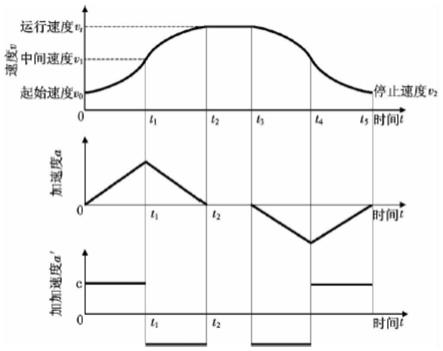
29.图3为本发明的加加速度控制方法中的时间
‑
速度曲线图;
30.图4为本发明智能堆高机的驱动轮线速度计算原理示意图;
31.图5为本发明的智能堆高机的系统结构示意图。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
33.本发明提供的一种智能堆高机的控制系统,包括检测模块、控制模块及执行机构。
34.具体的,检测模块是由多个传感器组成,用于获取智能堆高机的位置信息和姿态信息,并且将获取的信息发送给控制模块。
35.控制模块是根据检测模块获取的信息,计算出智能堆高机的线速度和偏转角控制指令,并且发送给执行机构。
36.执行机构是根据控制模块发送的控制指令完成智能堆高机的移动操作。
37.下面,结合附图1
‑
4详细说明本发明提供的一种智能堆高机的控制方法。
38.本发明提供的一种智能堆高机的控制方法,包括以下几个步骤。
39.s1:控制模块获取智能堆高机的当前位置信息和目标位置信息
40.s2:控制模块根据当前位置信息和目标位置信息,计算出智能堆高机的驱动轮线
速度和偏转角的控制指令,并发送给执行机构;
41.s3:执行机构根据控制模块发出的控制指令完成智能堆高机的移动操作。
42.以下结合附图来详细说明各个步骤。图1为多台智能堆高机协同路径规划示意图。如图1所示,其中一个智能堆高机的路径规划是从a点直行出发,在b点转向,再直行到c点结束。因此,该智能堆高机在路径ab之间和路径bc之间执行直线前进的移动操作;在b点执行转向的移动操作;并且在a点和c点执行智能堆高机的叉臂的升降操作,通过这些移动操作和升降操作,该智能堆高机完成全自动货物码垛工作。
43.如图2所示,智能堆高机上电后对设备中的各敏感器和相应执行机构进行硬件初始化,完成对设备硬件的初始化后,智能堆高机的中央控制单元将本体设为客户端,通过tcp/ip协议连接到wcs系统。智能堆高机完成网络连接后,对各敏感器和执行机构进行设备自检,一旦检测到设备异常将会主动上报异常信息,并重新进行硬件初始化。若堆高机所有敏感器和执行机构均正常,则进入正常工作流程,随时监测wcs系统下发的指令信息,根据wcs系统下发指令智能堆高机可完成移动操作、转向操作、货叉操作。
44.在移动操作过程中,智能堆高机首先需从wcs系统获取目标位置与目标航向角,将获取的目标位置和姿态与本体的实时位置和姿态进行拟合运算,计算出堆高机驱动轮相应转向角和运动速度,并下发给执行机构,完成智能堆高机移动操作。
45.在转向操作过程中,智能堆高机需从wcs系统获取目标航向和保持位置,将获取的目标姿态和位置与本体的实时姿态和位置进行拟合运算,计算出堆高机转向轮补偿角度。通过将原地转向角和转向补偿角相加,完成智能堆高机原地转向操作。
46.在货叉操作过程中,智能堆高机需从wcs系统获取货叉高度,将获取的目标高度与本体的实时高度进行拟合运算,利用增量型pid算法控制,完成货叉的升降操作。
47.本发明智能堆高机的直线移动操作控制方法包括以下步骤:
48.控制模块根据当前位置信息和目标位置信息,通过加加速度控制方法计算出智能堆高机在当前直线运动路径内的线速度vp和偏转角;
49.控制模块根据得出的智能堆高机线速度vp计算出智能堆高机驱动轮线速度vd和偏转角速度;
50.控制模块根据计算出的驱动轮线速度vd和偏转角速度,向智能堆高机的执行机构发出指令,使其调整驱动轮的线速度和偏转角速度到计算得到的驱动轮线速度vd和偏转角速度的值。
51.需要说明的是,偏转角速度的计算和控制,可以与驱动轮线速度的计算和控制分开,即本发明的步骤中可以不调整偏转角速度。
52.<第一实施例>
53.下面详细说明对控制模块根据当前位置信息和目标位置信息,通过加加速度控制方法计算出智能堆高机在当前直线运动路径内的线速度vp的步骤的具体计算方法。
54.加加速度控制方法中,将智能堆高机从当前位置行走到目标位置的时间设为时间t,将初始时间和时间t之间设置多个拐点时刻,在拐点时刻,智能堆高机的加加速度发生改变。并且,在相邻拐点时刻之间,加加速度为常数;。
55.智能堆高机的线速度,在初始时间为起始速度,在t2时间达到运行速度vt。从起始速度v0加速到运行速度vt所需时间的1/2处的时间点为t1。在初始时间点到时间点t1之前
的加加速度,与在时间点t1
‑
t2之间的加加速度,其中一个正值,另一个为与该正值的绝对值相同的负值。
56.具体的,如图3所示,将智能堆高机从当前位置a行走到目标位置b的时间设为t,以拐点时刻t1、t2、t3、t4、t5设为分界点,
57.则在0-t1时间段内,智能堆高机的线速度vp(以下简称速度v)由起始速度v0加速至拐点速度v1,加加速度a
′
为第一正值(图中显示为常数c),加速度a由0逐渐增加;
58.t1-t2时间段内,线速度vp由中间速度v1加速至运行速度vt,加加速度a
′
为第一负值(图中显示为
‑
c,但并不限于此值),加速度a逐渐减小至0;
59.t2-t3时间段为匀速段,保持运行速度vt不变;
60.t3-t4时间段内,线速度vp由运行速度vt降至中间速度v1,加加速度a
′
为第二负值(图中显示为
‑
c,但并不限于此值),加速度a由0逐渐减小到负值;
61.t4-t5时间段内,线速度vp由中间速度v1降至停止速度v2,加加速度a
′
为第二正值(图中显示为常数c,但并不限于此值),加速度a由负值逐渐增加至0。
62.该加加速度a
′
为不同常数,并且为绝对值相等的正值或负值,或者为0。
63.其中,
64.0-t1时间段的v-t(速度
‑
时间)函数为
[0065][0066]
t1-t2时间段的v-t函数为
[0067][0068]
由于整个运动过程中,智能堆高机的线速度vp的速度曲线是对称的,即0-t1时间段与t4-t5时间段的速度
‑
时间曲线对称,t1-t2时间段的速度
‑
时间曲线与t3-t4时间段的对称,t2-t3时间段内为匀速运动,所以在此只需讨论0-t1和t1-t2时间段的计算方法。
[0069]
然后,根据v-t函数计算出智能堆高机的驱动轮线速度vp。
[0070]
根据上述两个计算式得出上述各个阶段的v-t函数的导出过程如下:
[0071]
(1)0-t1时间段内,加加速度为常数c(c>0),故加速度为
[0072][0073]
对上式进行积分得v-t函数为
[0074][0075]
(2)t1-t2时间段内,加加速度为-c,对加加速度进行积分得加速度为
[0076][0077]
②
式中拐点时刻t1可由拐点速度v1确定,由
①
式可得
[0078][0079]
将
③
式代入
②
式并积分得v-t函数为
[0080][0081]
式
①
和
④
分别为0-t1、t1-t2时间段的v-t函数,式中c值为常数,决定加减速过程的快慢,其最佳值在工程实践中通过反复实验得到,v1一般取v0和vt的中间值,初始速度v0为agv在a点的速度,是预设值(或者是上一次agv移动的停止速度)和运行速度vt是agv出厂设置的值。t2-t3时间段的长度,是由a点到b点的总距离,减去0
‑
t2时刻agv已运行的距离的2倍(即,0
‑
t2和t3-t5这两个时间段内agv移动的距离),将差值除以运行速度vt得到的时长。
[0082]
上述的导出过程是加速段曲线的,减速段曲线算法与加速段一致,可看作加速段的逆过程,因此在这里不再赘述导出过程。
[0083]
综上,通过上述加加速度控制方法中的函数,计算得出智能堆高机的线速度vp之后,再利用图4所示的位置关系,由控制模块计算出相应的驱动轮线速度vd,并发送给执行机构。随后执行机构根据控制单元的指令,使得堆高机的驱动轮线速度调整为vd。
[0084]
在本发明中,预设路径规划信息是指,根据智能堆高机的路径规划图,并通过上述加加速度控制方法预设规划了智能堆高机的线速度vp。
[0085]
由于智能堆高机在运动过程中,其载重较重,为更好的控制车体运动稳定性和精度控制,在长距离运动过程中采用加加速控制方法控制其速度,该加加速控制方法的加减速过程中,加速度没有突变,在速度变换过程中不存在柔性冲击,适用于高速运动的智能堆高机。
[0086]
由此可见,本发明是根据已规划的智能堆高机的线速度,实时并且直接向智能堆高机输出驱动轮线速度,这样就不会有由于传感器的响应时间造成的延迟现象,使得智能堆高机速度调整的实时性大幅提高。
[0087]
<第二实施例>
[0088]
上述智能堆高机直线移动操作适用于图1的ab阶段和bc阶段,两者均为直线段。下面介绍不是直线段,存在一定偏转角的情况。
[0089]
本发明的控制模块根据当前位置信息和目标位置信息,规划出智能堆高机在路线上的每一点的驱动轮线速度vd和角速度w的规划值,然后通过控制模块向执行模块发出指令,使得执行模块按照每一点的规划值,来控制驱动轮达到线速度vd和偏转角度α。
[0090]
由于对驱动轮线速度vd的规划和控制方法,在第一实施例中已介绍过了,以下只介绍规划和控制偏转角度的方法。
[0091]
具体的,结合图4所示的位置关系,智能堆高机1的行走动力来自于agv驱动轮2。驱动轮前方的两个轮是从动轮3,起着承载重力和转向灵活性的辅助作用。支点轮3是万向轮,位于agv驱动轮2的右侧,即与驱动轮均位于agv的后侧(以agv前进方向为前方)。
[0092]
根据目标位置和当前位置之间的坐标位置关系,可以得知驱动轮从当前位置移动到目标位置应该偏转的角度(总偏转角度)。然后,将此总偏转角度,结合智能堆高机的性能(例如最小转变半径和运行速度),分解到从当前位置移动到目标位置这条路线上的每一点
的偏转角度。例如,可以将总偏转角度平均分配到多个点的偏转角度。在此假设在每个点偏转的角速度为w。
[0093]
根据在第一实施例规划并计算的智能堆高机的线速度vp,以及前述规划的每个点的角速度w,参考图4,能够得出智能堆高机支点轮4旋转半径r1,计算公式如下:
[0094]
r1+d/2=vp/w
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ⑤
[0095]
由
⑤
式求出的r1可得出堆高机驱动轮2的转向角α,
[0096]
计算公式如下:
[0097]
tan(α)=l/r1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ⑥
[0098]
由
⑤
式求出的r1可得出堆高机驱动轮2的旋转半径r,
[0099]
计算公式如下:
[0100][0101]
由
⑦
式求出的r可得出堆高机驱动轮2的运动线速度vd,
[0102]
计算公式如下:
[0103]
vd=w*r
ꢀꢀꢀꢀꢀ⑧
。
[0104]
图3中,α为智能堆高机1的转向角,vd为驱动轮线速度,r为驱动轮旋转半径,r1为支点轮旋转半径,l为堆高机轴距、d为堆高机轮距。该计算方法适用于单驱动轮的agv。
[0105]
本发明采用单点位置旋转方式,可以保证最小角旋转,采用绕车体支点旋转方式,旋转过程中根据目标位置和姿态与当前实时的位置姿态进行拟合运算,计算出驱动轮角度偏差值,将绕支点轮旋转角度值加上偏差值进行角度旋转,从而完成单点位置转向的位置与角度保持。
[0106]
综上,通过上述方法得出智能堆高机的驱动轮偏转角度α和驱动轮线速度vd,并发送给执行机构。随后执行机构根据控制单元的指令,使得堆高机完成转向移动操作。
[0107]
上述智能堆高机直线移动操作适用于智能堆高机在图1的ab点处的转向移动操作。
[0108]
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称pid(proportional
‑
integral
‑
derivative)控制,又称pid调节。pid控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用pid控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用pid控制技术。pid控制,实际中也有pi(proportional integral)和pd控制。在这里的pi控制是运用积分控制的,能消除余差的控制,故比例积分控制是使用最多、应用最广的控制规律。pd控制是微分控制,使系统的稳定性增加,能减小最大偏差和余差,加快控制过程,改善控制质量。
[0109]
而pid控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
[0110]
鉴于pid控制算法的良好性能,在本发明智能堆高机的叉臂精确控制采用pid闭环控制。
[0111]
本发明中的智能堆高机根据实际需要,可以采用单驱动轮agv。
[0112]
另外,本发明提供的一种智能堆高机还设有安全保护机制。具体为智能堆高机在工作过程中,鉴于智能堆高机自重和载货均较重,一旦车体周围环境出现异常变化,或车体运行异常,很容易出现生产安全事故。基于安全生产的需求,在智能堆高机上加入了多敏感器,主要敏感器包括堆高机前后避障雷达、堆高机防碰撞围栏、高度限制光电开关及角度限制光电开关等。
[0113]
综上,本发明提供的一种智能堆高机的控制系统及控制方法,利用具有不同常数的加加速度,使得智能堆高机的加速度线性变化而且可以根据路线长短和智能堆高机的性能进行精确设计和调整,因此本发明可以使智能堆高机的运行速度更平顺,控制精度更高。
[0114]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1