机器人系统及其控制方法
1.本发明涉及机器人技术,尤其是一种机器人系统及其控制方法。
背景技术:
2.人体的生物电信号包括肌电信号、脑电信号、心电信号、眼动信号等,这些看似微小的信号实则蕴含了大量的人类行为信息,是人类运动意图的直接反应。近年来,随着智能化的不断发展,在全球掀起了一股研发人机交互的热潮。其中,基于脑电信号识别的脑机接口(brain computer interface,bci)有着非常良好的应用前景。1999年,第一届国际脑机接口大会给bci的定义是:bci是一种独立于常规的输出通路(大脑外周神经与肌肉)的通讯控制系统。这项技术追求的是创造出全新的交互方式,让人的想法跨越中间环节直接将指令传送到终端完成操作。脑机接口是认知神经科学和生物科学、信号处理科学、机器学习等多个学科的交叉产物,涉及到多个研究领域的前沿成果,作为一项远未成熟的技术,脑机接口在医疗、教育、计算机、娱乐、工业等等领域有着非常广阔的应用场景。在医疗领域,通过脑电信号的提取分析,可以对抑郁症、痴呆症、癫痫等多种精神或脑部疾病做出辅助诊断,与脑电相关的肌电信号接口技术更是可以帮助残疾患者拥有如同真实四肢一般精准度的假肢;通过将脑电和肌电结合,综合两类生物电信号的优势,并通过加入视频、力度和温度等多重感知式反馈和视觉伺服技术进行动作辅助来提升基于生物电信号的人机交互效率,最终在控制科学领域,发挥出其他交互模式所不具备的优势。
3.现在脑机接口的应用范围越来越宽泛,其中使用脑机接口对机器人进行控制是一种比较典型的使用场景。常见的包括机器人的移动以及机器臂的操作等等。与本发明相似的实现方案都是通过单一脑电接口,通过佩戴的脑电帽获取操作者的动作想象等特殊的脑电信号。之后,这些信号输入计算机使用算法进行分析,获得操作指令,即操作者的意图。这些指令会通过有线或无线的方式传输给机器人,最终实现整个完整的操作流程。在常见的实现方案中,随着对指令复杂度要求的提高,一般通过增加电极的数量以获取更复杂的脑电信号,同时配合更复杂的算法,对这些信号进行分析运算。
4.现有脑机接口的性能不高,不仅能分辨出的信息少,反应速度慢,而且准确率不高。当脑机接口用于控制机器人时,如果需要脑机接口输出更复杂的指令,则需要脑电帽等硬件或算法复杂度的大幅提高。导致成本飙升。
技术实现要素:
5.为解决上述技术问题的至少之一,本发明的目的在于:提供一种机器人系统及其控制方法。
6.第一方面,本发明实施例提供了:
7.一种机器人系统,包括:
8.脑电信号感应单元,由脑电帽和安装在脑电帽中的多个脑电信号感应电极构成;
9.臂环,设置有振动马达和肌电信号感应电极;
10.信号放大器,用于将所述脑电信号感应电极的信号放大为第一控制信号,以及将所述肌电信号感应电极的信号放大为第二控制信号;
11.机器人,包括机器人底盘、安装在所述机器人底盘上的机械臂和障碍物传感器,所述底盘上设置运动机构;
12.计算机,用于根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构,根据所述第一控制信号控制所述操作对象,以及当所述障碍物传感器检测到障碍物时,控制所述振动马达振动。
13.在一些实施例中,所述臂环包括第一臂环和第二臂环,所述障碍物传感器包括第一超声波传感器和第二超声波传感器,所述计算机在所述第一超声波传感器检测到障碍物时,控制所述第一臂环的振动马达振动,所述计算机在所述第二超声波传感器检测到障碍物时,控制所述第二臂环的振动马达振动。
14.在一些实施例中,所述第一超声波传感器安装在所述底盘的左侧,所述第二超声波传感器安装在所述底盘的右侧。
15.在一些实施例中,所述振动马达的振动频率与所述障碍物传感器检测到的障碍物距离成反比。
16.在一些实施例中,所述脑电信号感应电极的数量为8个。
17.在一些实施例中,所述计算机设有第一无线通信模块,所述机器人设有第二无线通信模块,所述计算机通过无线的方式与所述机器人通信。
18.在一些实施例中,所述第一控制信号包括四种信号状态,所述第二控制信号包括两种信号状态。
19.在一些实施例中,所述根据所述第一控制信号控制所述操作对象,包括:
20.当所述控制对象为机械臂时,控制所述机械臂向左旋转、向右旋转、夹持物品或者松开物品;
21.当所述控制对象为运动机构时,控制所述运动机构向前移动、向后移动、向左移动或者向右移动。
22.在一些实施例中,所述运动机构由可转向的轮子和驱动电机构成。
23.第二方面,本发明实施例提供了:
24.一种机器人系统的控制方法,包括以下步骤:
25.获取第一控制信号和第二控制信号;
26.根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构;
27.根据所述第一控制信号控制所述操作对象;
28.当所述障碍物传感器检测到障碍物时,控制所述振动马达振动。
29.本发明实施例的有益效果是:同时设置有脑电信号感应单元和臂环,通过信号放大器将脑电信号感应单元的脑电信号感应电极的信号放大为第一控制信号,以及将臂环的肌电信号感应电极的信号放大为第二控制信号;当控制信号传输到计算机时,计算机根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构,根据所述第一控制信号控制所述操作对象,以及当所述障碍物传感器检测到障碍物时,控制所述振动马达振动,本发明可以组合得到多组交互指令,实现多种不同的控制组合;此外,通过障
碍物传感器将机器人检测到障碍的情况反馈到臂环中,使得操作者可以更加准确地感知机器人所处的空间。
附图说明
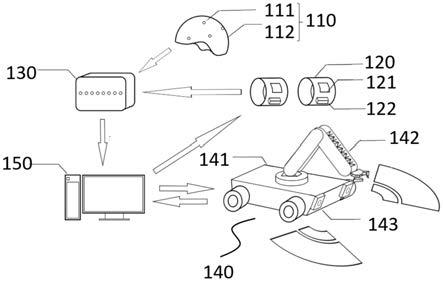
30.图1为根据本发明实施例提供的一种机器人系统的模块框图;
31.图2为根据本发明实施例提供的机器人系统的一种控制方法示意图;
32.图3为根据本发明实施例提供的机器人系统的另一种控制方法示意图。
具体实施方式
33.下面结合说明书附图和具体的实施例对本发明进行进一步的说明。
34.参照图1,本实施例公开了一种机器人系统,包括:
35.脑电信号感应单元110,由脑电帽112和安装在脑电帽112中的多个脑电信号感应电极111构成;
36.臂环120,设置有振动马达121和肌电信号感应电极122;
37.信号放大器130,用于将所述脑电信号感应电极的信号放大为第一控制信号,以及将所述肌电信号感应电极的信号放大为第二控制信号;
38.机器人140,包括机器人底盘141、安装在所述机器人底盘上的机械臂142和障碍物传感器143,所述底盘上设置运动机构;
39.计算机150,用于根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构,根据所述第一控制信号控制所述操作对象,以及当所述障碍物传感器检测到障碍物时,控制所述振动马达振动。
40.可以理解的是,同时设置有脑电信号感应单元和臂环,通过信号放大器将脑电信号感应单元的脑电信号感应电极的信号放大为第一控制信号,以及将臂环的肌电信号感应电极的信号放大为第二控制信号;当控制信号传输到计算机时,计算机根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构,根据所述第一控制信号控制所述操作对象,以及当所述障碍物传感器检测到障碍物时,控制所述振动马达振动,本发明可以组合得到多组交互指令,实现多种不同的控制组合;此外,通过障碍物传感器将机器人检测到障碍的情况反馈到臂环中,使得操作者可以更加准确地感知机器人所处的空间。
41.需要理解的是:在本实施例中,在脑电帽之外,加装了肌电电极,用两侧臂环的方式安装在操控者的手臂上,收集手臂肌电信号。手臂2个电极与脑电帽上的8个电极同时接受信号,并通过线缆传输到信号放大器。信号放大器获取微弱的脑电与肌电信号,将其放大后,发送到计算机进行处理。在使用特定算法(其中该算法可以是经过训练的神经网络模型,也可以是一些波形匹配算法)对肌电和脑电信号进行计算后,得到控制指令,最后将该控制指令发送到机器人,使其行动,完成脑电信号和肌电信号对机器人的控制。产品的功能要求机器人在控制下,能完成前后左右移动,以及机械臂的左右旋转、抓住松开,共计8个功能。但是,脑机接口获取的信号只分为前后左右四个方向,是无法实现对机器人控制所需的维度的。在本技术方案中,增加的肌电信号接口能确定脑电信号控制的对象,使有限的脑电信号分别对机器人的底盘和机械臂进行控制,从而达到拓展控制能力的目标。由于本实施
例的重点在于结合肌电信号控制接口扩展原有功能。参照图2,下面对该改进的工作逻辑进行介绍:
42.当双手放松时,臂环上的电极收集到的双侧肌电信号为0,此时系统将控制对象选定为机器人底盘。从脑电信号中分析出的前后左右四种指令,分别对应底盘向前后左右移动;
43.当双手举起时,臂环上的电极收集到的双侧或单侧(考虑误差情况)肌电信号为1,此时系统将控制对象选定为机器人的机械臂。从脑电信号中分析出的前后左右四种指令,则分别对应机械臂的抓取、放开、向左旋转、向右旋转。
44.在本实施例中,在机器人的左前方和右前方分别安装了超声波距离感应器,能够在机器人前进过程中探测到相应方向上需要规避的障碍物。这些感应器连接到机器人上的处理器,由处理器将信号以无线连接的方式发送给电脑。相应地,该实施例在佩戴在操作者两侧的臂带中分别安装了振动马达,以有线方式从计算机接受震动信号,从不同方向在体感上给予操作者感知反馈。参照图3,下面介绍该功能的工作逻辑:
45.当双手放松,机器人在向某个方向前进时,假如左前方的超声波感应器探测到在前进路径上左前方存在障碍物,需要向右侧转向,则会将信号传递给计算机,计算机将多次短暂频率信号传递到左侧臂环上的振动马达,形成多次短暂震动的触觉感知反馈,操作者能对此形成体感上的直观反馈,迅速做出相应的动作想象改变小车的运动方向。当右前方遇到障碍物时则右侧臂环震动。震动信号的震
‑
停频率随着感应器获得的障碍物距离呈反比,距离越近,频率越高,以形成急促的反馈,向操作者发出距离反馈信息。
46.在一些实施例中,所述臂环包括第一臂环和第二臂环,所述障碍物传感器包括第一超声波传感器和第二超声波传感器,所述计算机在所述第一超声波传感器检测到障碍物时,控制所述第一臂环的振动马达振动,所述计算机在所述第二超声波传感器检测到障碍物时,控制所述第二臂环的振动马达振动。
47.可以理解的是,通过设置振动马达和控制振动马达进行反馈振动,可以提高用户的操作感。
48.在一些实施例中,所述第一超声波传感器安装在所述底盘的左侧,所述第二超声波传感器安装在所述底盘的右侧。
49.可以理解的是通过设置左右两个超声波传感器,可以感知到左右两边的障碍物。
50.在一些实施例中,所述振动马达的振动频率与所述障碍物传感器检测到的障碍物距离成反比。
51.在一些实施例中,所述脑电信号感应电极的数量为8个。
52.在一些实施例中,所述计算机设有第一无线通信模块,所述机器人设有第二无线通信模块,所述计算机通过无线的方式与所述机器人通信。
53.在一些实施例中,所述第一控制信号包括四种信号状态,所述第二控制信号包括两种信号状态。
54.在一些实施例中,所述根据所述第一控制信号控制所述操作对象,包括:
55.当所述控制对象为机械臂时,控制所述机械臂向左旋转、向右旋转、夹持物品或者松开物品;
56.当所述控制对象为运动机构时,控制所述运动机构向前移动、向后移动、向左移动
或者向右移动。
57.在一些实施例中,所述运动机构由可转向的轮子和驱动电机构成。
58.本实施例公开了一种机器人系统的控制方法,包括以下步骤:
59.s1、获取第一控制信号和第二控制信号;
60.s2、根据所述第二控制信号选中被操作对象,所述被操作对象包括机械臂或者运动机构;
61.s3、根据所述第一控制信号控制所述操作对象;
62.s4、当所述障碍物传感器检测到障碍物时,控制所述振动马达振动。
63.对于上述方法实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
64.以上是对本发明的较佳实施进行了具体说明,但本发明并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本申请权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1