一种一维多象限燃煤机组主汽温模糊控制方法与流程
:
1.本发明涉及一种燃煤机组主汽温控制方法,具体涉及一种一维多象限燃煤机组主汽温模 糊控制方法。
背景技术:
2.我国以燃煤电站为主的电力供应格局在未来相当长的时间内不会发生根本性改变,而随 着我国火力发电机组的能源结构变化,火力发电机组负荷容量越来越大,结构越来越复杂, 用于运行煤质的变化和负荷升降的影响,机组主汽温的控制水平在机组负荷动态变化过程受 到严峻的考验,目前对于如何提高机组主汽温的控制水平有很多方法,而模糊控制是其中采 用比较广泛的一种方法。
3.传统模糊控制方法一般采用控制偏差和控制偏差变化率的二维方法生成模糊隶属表,并 利用专家经验调整模糊表,最终得到模糊控制的作用大小,这种方法能够较好的在二维控制 空间实现平稳的滑移,但如何利用专家经验调整最好的模糊表仍然是一个较大的难题,其在 局部的修改往往会影响全局的控制效果,不仅如此对于具有自稳定属性的机组主汽温度控制, 如何更好的利用模糊控制进行局部修正是解决模糊有效化利用的最好办法之一。
技术实现要素:
4.本发明的目的在于针对现有燃煤机组主汽温模糊控制存在的不足,提供了一种一维多象 限燃煤机组主汽温模糊控制方法,该方法根据燃煤机组主汽温度控制系统自稳定特性,将二 维模糊控制降维值一维多象限模糊控制,从而可根据机组主汽温在每个控制象限的变化特点 实现局部最优调整,实现主汽温模糊控制最优化和调试便利性,该方法兼顾模糊控制的局部 最优化调整便利性和实用性,在机组主汽温控制上取得了良好的控制效果。
5.为达到上述目的,本发明采用如下的技术方案予以实现:
6.一种一维多象限燃煤机组主汽温模糊控制方法,包括以下步骤:
7.1)根据燃煤机组主汽温度,主汽温度设定值,建立温度偏差判断,温度偏差变化率判断 和温度偏差变化率加速度判断,构造燃煤机组主汽温度一维多象限模糊判断空间;
8.2)根据燃煤机组主汽温度,主汽温度设定值建立温度偏差信号,并根据有差自稳定系统 控制特性,建立燃煤机组主汽温度一维多象限模糊控制空间;
9.3)对步骤1)中的所建立的燃煤机组主汽温度一维多象限模糊控制判断空间和步骤2) 中所建立的燃煤机组主汽温度一维多象限模糊控制空间,建立燃煤机组主汽温度一维多象限 模糊作用空间,并最终获得燃煤机组主汽温度一维多象限模糊控制作用量。
10.本发明进一步的改进在于,步骤1)中,具体实现方法如下:
11.设燃煤机组主汽温度为t
p
,主汽温度设定值为t
s
,则机组主汽温度偏差t
dev
为:
12.t
dev
=t
p
‑
t
s
13.机组主汽温度偏差变化率t
r
采用机组主汽温度偏差微分,其计算为:
[0014][0015]
其中t
r
为机组主汽温度偏差微分时间,k
r
为机组主汽温度偏差微分增益,s为拉普拉斯 算子;
[0016]
机组主汽温度偏差变化率加速度t
a
采用机组主汽温度偏差变化率微分,其计算为:
[0017][0018]
其中t
a
为机组主汽温度偏差变化率微分时间,k
a
为机组主汽温度偏差变化率微分增益;
[0019]
将t
dev
、t
r
、t
a
按照正负值划分为8种判断情况,具体如下:
[0020]
t
dev,n
=true if t
dev
<0
[0021]
t
dev,p
=true if t
dev
≥0
[0022]
其中t
dev,p
、t
dev,n
分别为温度偏差正向触发和温度偏差负向触发;
[0023]
t
r,n
=true if t
r
<0
[0024]
t
r,p
=true if t
r
≥0
[0025]
其中t
r,p
、t
r,n
分别为温度偏差变化率正向触发和温度偏差变化率负向触发;
[0026]
t
a,n
=true if t
a
<0
[0027]
t
a,p
=true if t
a
≥0
[0028]
其中t
a,p
、t
a,n
分别为温度偏差变化率加速度正向触发和温度偏差变化率加速度负向触 发;
[0029]
将上述组合分为8种情况分别对应8个象限s1~s8,s1~s8即为燃煤机组主汽温度一维多象 限模糊判断空间。
[0030]
本发明进一步的改进在于,8种情况对应的8个象限如下:
[0031]
s1:t
dev,p
=true and t
r,p
=true and t
a,p
=true,代表为主汽温度正向超温,温 度偏差加大且温度偏差加速变大;
[0032]
s2:t
dev,p
=true and t
r,p
=true and t
a,n
=true,代表为主汽温度正向超温,温 度偏差加大且温度偏差减速变大;
[0033]
s3:t
dev,p
=true and t
r,n
=true and t
a,p
=true,代表为主汽温度正向超温,温 度偏差减小且温度偏差加速变小;
[0034]
s4:t
dev,p
=true and t
r,n
=true and t
a,n
=true,代表为主汽温度正向超温,温 度偏差减小且温度偏差减速变小;
[0035]
s5:t
dev,n
=true and t
r,p
=true and t
a,p
=true,代表为主汽温度负向欠温,温 度偏差加大且温度偏差加速变大;
[0036]
s6:t
dev,n
=true and t
r,p
=true and t
a,n
=true,代表为主汽温度负向欠温,温 度偏差加大且温度偏差减速变大;
[0037]
s7:t
dev,n
=true and t
r,n
=true and t
a,p
=true,代表为主汽温度负向欠温,温 度偏差减小且温度偏差加速变小;
[0038]
s8:t
dev,n
=true and t
r,n
=true and t
a,n
=true,代表为主汽温度负向欠温,温 度偏差减小且温度偏差减速变小。
[0039]
本发明进一步的改进在于,步骤2)中,根据燃煤机组主汽温度,主汽温度设定值建立 温度偏差信号,并根据有差自稳定系统控制特性,建立燃煤机组主汽温度一维多象限模糊控 制空间,具体如下:
[0040]
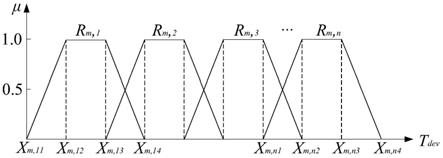
对步骤1)中所述s1~s8判断空间中,每一个判断空间均构造如下的模糊控制空间:
[0041]
作用空间的横坐标为t
dev
,对每一个控制空间存在r
m,1
,r
m,2
…
r
m,n
个作用区域,其中m为 1
…
8任意模糊控制空间,n为第m模糊控制空间作用区域个数;而作用区域r
m,n
的作用范围 为x
m,n1
…
x
m,n4
,定义作用区域r
m,n
的隶属度为μ
m,n
,则μ
m,n
的计算如下:
[0042][0043]
μ
m,n
=1.0t
dev
∈(x
m,n2
,x
m,n3
)
[0044][0045][0046]
则在m模糊控制空间大小f
m
为:
[0047][0048]
其中将第m模糊控制空间称之为第m象限,将f
m
称之为第m象限作用空间大小,由此建 立燃煤机组主汽温度一维多象限模糊控制空间作用大小。
[0049]
本发明进一步的改进在于,结合步骤1)和步骤2)中所建立的燃煤机组主汽温度一维多 象限模糊判断空间和燃煤机组主汽温度一维多象限模糊控制空间,建立燃煤机组主汽温度一 维多象限模糊作用空间,并最终获得燃煤机组主汽温度一维多象限模糊控制作用量,具体原 理如下:
[0050]
如前所述,每一个判断空间均存在一个对应的作用空间,当s1=1时,延时t
d
被触发,则f1进入下行通道;而s1~s8在同一时刻只能有一个判断空间被触发,最终的下行通道输出值与缩 放因子s
ca
相乘,并经过滤波环节,经过滤波后获得的最终值f即为燃煤机组主汽温度一维多 象限模糊控制作用量。
[0051]
本发明进一步的改进在于,滤波作用机理为:
[0052][0053]
其中p、p'分别为滤波前后滤波后的值,t
l
为滤波作用时间。
[0054]
本发明至少具有如下有益的技术效果:
[0055]
本发明首先根据机组主汽温度设定值,建立温度偏差判断,温度偏差变化率判断和温度 偏差变化率加速度判断,构造燃煤机组主汽温度一维多象限模糊判断空间;其次,根据机组 主汽温度,主汽温度设定值建立温度偏差信号,并根据有差自稳定系统控制特性,建立燃煤 机组主汽温度一维多象限模糊控制空间;最后所建立的模糊判断空间和控制空间,经过不同 的信号判断和导通,并设置空间缩放因子和滤波因子,最终获得燃煤机组
度偏差加大且温度偏差加速变大;
[0082]
s2:t
dev,p
=true and t
r,p
=true and t
a,n
=true,代表为主汽温度正向超温,温 度偏差加大且温度偏差减速变大;
[0083]
s3:t
dev,p
=true and t
r,n
=true and t
a,p
=true,代表为主汽温度正向超温,温 度偏差减小且温度偏差加速变小;
[0084]
s4:t
dev,p
=true and t
r,n
=true and t
a,n
=true,代表为主汽温度正向超温,温 度偏差减小且温度偏差减速变小;
[0085]
s5:t
dev,n
=true and t
r,p
=true and t
a,p
=true,代表为主汽温度负向欠温,温 度偏差加大且温度偏差加速变大;
[0086]
s6:t
dev,n
=true and t
r,p
=true and t
a,n
=true,代表为主汽温度负向欠温,温 度偏差加大且温度偏差减速变大;
[0087]
s7:t
dev,n
=true and t
r,n
=true and t
a,p
=true,代表为主汽温度负向欠温,温 度偏差减小且温度偏差加速变小;
[0088]
s8:t
dev,n
=true and t
r,n
=true and t
a,n
=true,代表为主汽温度负向欠温,温 度偏差减小且温度偏差减速变小;
[0089]
上述s1~s8即为燃煤机组主汽温度一维多象限模糊判断空间;
[0090]
2)根据燃煤机组主汽温度,主汽温度设定值建立温度偏差信号,并根据有差自稳定系统 控制特性,建立燃煤机组主汽温度一维多象限模糊控制空间,具体如下:
[0091]
对步骤1)中所述s1~s8判断空间中,每一个判断空间均构造如下的模糊控制空间,通 过附图2进行说明:
[0092]
附图2中所述作用空间的横坐标为t
dev
,对每一个控制空间存在r
m,1
,r
m,2
…
r
m,n
个作用区 域,其中m为1
…
8任意模糊控制空间,n为第m模糊控制空间作用区域个数;而作用区域r
m,n
的作用范围为x
m,n1
…
x
m,n4
,定义作用区域r
m,n
的隶属度为μ
m,n
,则μ
m,n
的计算如下:
[0093][0094]
μ
m,n
=1.0t
dev
∈(x
m,n2
,x
m,n3
)
[0095][0096][0097]
则在m模糊控制空间大小f
m
为:
[0098][0099]
其中将第m模糊控制空间称之为第m象限,将f
m
称之为第m象限作用空间大小,由此建 立燃煤机组主汽温度一维多象限模糊控制空间作用大小;
[0100]
3)结合步骤1)和步骤2)中所建立的燃煤机组主汽温度一维多象限模糊判断空间和燃 煤机组主汽温度一维多象限模糊控制空间,建立燃煤机组主汽温度一维多象限模糊作用空间, 并最终获得燃煤机组主汽温度一维多象限模糊控制作用量,如附图3所示,具体原理如下:
[0101]
如前所述,每一个判断空间均存在一个对应的作用空间,如图3所示,例如当s1=1时, 延时t
d
被触发,则f1进入下行通道;而s1~s8在同一时刻只能有一个判断空间被触发,最终的 下行通道输出值与缩放因子s
ca
相乘,并经过滤波环节,滤波作用机理为:
[0102][0103]
其中p、p'分别为滤波前后滤波后的值,t
l
为滤波作用时间;经过滤波后获得的最终值f 即为燃煤机组主汽温度一维多象限模糊控制作用量。
[0104]
实施例
[0105]
本发明提供的一种一维多象限燃煤机组主汽温度模糊控制方法,以1000mw超超临界机 组为例,进行具体说明,包括以下步骤:
[0106]
1、利用燃煤机组主汽温度,主汽温度设定值,建立温度偏差判断,温度偏差变化率判断 和温度偏差变化率加速度判断,构造燃煤机组主汽温度一维多象限模糊判断空间,具体如下:
[0107]
设燃煤机组主汽温度为t
p
,主汽温度设定值为t
s
,则机组主汽温度偏差t
dev
为:
[0108]
t
dev
=t
p
‑
t
s
[0109]
机组主汽温度偏差变化率t
r
采用机组主汽温度偏差微分,其计算为:
[0110][0111]
其中t
r
为机组主汽温度偏差微分时间,k
r
为机组主汽温度偏差微分增益,s为拉普拉斯 算子;其中k
r
=1.0,t
r
=60s;
[0112]
机组主汽温度偏差变化率加速度t
a
采用机组主汽温度偏差变化率微分,其计算为:
[0113][0114]
其中t
a
为机组主汽温度偏差变化率微分时间,k
a
为机组主汽温度偏差变化率微分增益;
[0115]
其中k
a
=1.0,t
a
=60s;
[0116]
其余剩下实施如步骤1)所述。
[0117]
2、根据燃煤机组主汽温度,主汽温度设定值建立温度偏差信号,并根据有差自稳定系统 控制特性,建立燃煤机组主汽温度一维多象限模糊控制空间,具体如下:
[0118]
对步骤1)中所述s1~s8判断空间中,每一个判断空间均构造如下的模糊控制空间,通 过附图2进行说明:
[0119]
附图2中所述作用空间的横坐标为t
dev
,对每一个控制空间存在r
m,1
,r
m,2
…
r
m,n
个作用区 域,其中m为1
…
8任意模糊控制空间,n为第m模糊控制空间作用区域个数;而作用区域r
m,n
的作用范围为x
m,n1
…
x
m,n4
,定义作用区域r
m,n
的隶属度为μ
m,n
,则μ
m,n
的计算如下:
[0120][0121]
μ
m,n
=1.0t
dev
∈(x
m,n2
,x
m,n3
)
[0122][0123][0124]
则在m模糊控制空间大小f
m
为:
[0125][0126]
其中将第m模糊控制空间称之为第m象限,将f
m
称之为第m象限作用空间大小,由此建 立燃煤机组主汽温度一维多象限模糊控制空间作用大小;
[0127]
其中针对作用空间f1,具体的配置参数如下:
[0128]
m=1,n=7;
[0129]
r
1,1
=0,r
1,2
=3,r
1,3
=7,r
1,4
=12,r
1,5
=18,r
1,6
=25,r
1,7
=25;
[0130]
x
1,11
=0,x
1,12
=1,x
1,13
=2,x
1,14
=3;
[0131]
x
1,21
=2,x
1,22
=3,x
1,23
=4,x
1,24
=5;
[0132]
x
1,31
=4,x
1,32
=5,x
1,33
=7,x
1,34
=8;
[0133]
x
1,41
=7,x
1,42
=8,x
1,43
=9,x
1,44
=11;
[0134]
x
1,51
=9,x
1,52
=11,x
1,53
=13,x
1,54
=15;
[0135]
x
1,61
=13,x
1,62
=15,x
1,63
=20,x
1,64
=30;
[0136]
x
1,71
=20,x
1,72
=30,x
1,73
=300,x
1,74
=1000;
[0137]
其中针对作用空间f2,具体的配置参数如下:
[0138]
m=2,n=7;
[0139]
r
2,1
=0,r
2,2
=4,r
2,3
=9,r
2,4
=13,r
2,5
=18,r
2,6
=25,r
2,7
=25;
[0140]
x
2,11
=0,x
2,12
=1,x
2,13
=2,x
2,14
=3;
[0141]
x
2,21
=2,x
2,22
=3,x
2,23
=4,x
2,24
=5;
[0142]
x
2,31
=4,x
2,32
=5,x
2,33
=7,x
2,34
=8;
[0143]
x
2,41
=7,x
2,42
=8,x
2,43
=9,x
2,44
=11;
[0144]
x
2,51
=9,x
2,52
=11,x
2,53
=13,x
2,54
=15;
[0145]
x
2,61
=13,x
2,62
=15,x
2,63
=20,x
2,64
=30;
[0146]
x
2,71
=20,x
2,72
=30,x
2,73
=300,x
2,74
=1000;
[0147]
其中针对作用空间f3,具体的配置参数如下:
[0148]
m=3,n=7;
[0149]
r
3,1
=0,r
3,2
=3,r
3,3
=7,r
3,4
=12,r
3,5
=16,r
3,6
=23,r
3,7
=23;
[0150]
x
3,11
=0,x
3,12
=1,x
3,13
=2,x
3,14
=3;
[0151]
x
3,21
=2,x
3,22
=3,x
3,23
=4,x
3,24
=5;
[0152]
x
3,31
=4,x
3,32
=5,x
3,33
=7,x
3,34
=8;
[0153]
x
3,41
=7,x
3,42
=8,x
3,43
=9,x
3,44
=11;
[0154]
x
3,51
=9,x
3,52
=11,x
3,53
=13,x
3,54
=15;
[0155]
x
3,61
=13,x
3,62
=15,x
3,63
=20,x
3,64
=30;
[0156]
x
3,71
=20,x
3,72
=30,x
3,73
=300,x
3,74
=1000;
[0157]
其中针对作用空间f4,具体的配置参数如下:
[0158]
m=4,n=7;
[0159]
r
4,1
=0,r
4,2
=2,r
4,3
=6,r
4,4
=11,r
4,5
=15,r
4,6
=22,r
4,7
=22;
[0160]
x
4,11
=0,x
4,12
=1,x
4,13
=2,x
4,14
=3;
[0161]
x
4,21
=2,x
4,22
=3,x
4,23
=4,x
4,24
=5;
[0162]
x
4,31
=4,x
4,32
=5,x
4,33
=7,x
4,34
=8;
[0163]
x
4,41
=7,x
4,42
=8,x
4,43
=9,x
4,44
=11;
[0164]
x
4,51
=9,x
4,52
=11,x
4,53
=13,x
4,54
=15;
[0165]
x
4,61
=13,x
4,62
=15,x
4,63
=20,x
4,64
=30;
[0166]
x
4,71
=20,x
4,72
=30,x
4,73
=300,x
4,74
=1000;
[0167]
其中针对作用空间f5,具体的配置参数如下:
[0168]
m=5,n=7;
[0169]
r
5,1
=
‑
22,r
5,2
=
‑
22,r
5,3
=
‑
16,r
5,4
=
‑
11,r
5,5
=
‑
7,r
5,6
=
‑
4,r
5,7
=
‑
2;
[0170]
x
5,11
=
‑
1000,x
5,12
=
‑
300,x
5,13
=
‑
30,x
5,14
=
‑
20;
[0171]
x
5,21
=
‑
30,x
5,22
=
‑
20,x
5,23
=
‑
15,x
5,24
=
‑
13;
[0172]
x
5,31
=
‑
15,x
5,32
=
‑
13,x
5,33
=
‑
11,x
5,34
=
‑
9;
[0173]
x
5,41
=
‑
11,x
5,42
=
‑
9,x
5,43
=
‑
8,x
5,44
=
‑
7;
[0174]
x
5,51
=
‑
8,x
5,52
=
‑
7,x
5,53
=
‑
5,x
5,54
=
‑
4;
[0175]
x
5,61
=
‑
5,x
5,62
=
‑
4,x
5,63
=
‑
3,x
5,64
=
‑
2;
[0176]
x
5,71
=
‑
3,x
5,72
=
‑
2,x
5,73
=
‑
1,x
5,74
=0;
[0177]
其中针对作用空间f6,具体的配置参数如下:
[0178]
m=6,n=7;
[0179]
r
6,1
=
‑
22,r
6,2
=
‑
22,r
6,3
=
‑
16,r
6,4
=
‑
11,r
6,5
=
‑
8,r
6,6
=
‑
5,r
6,7
=
‑
3;
[0180]
x
6,11
=
‑
1000,x
6,12
=
‑
300,x
6,13
=
‑
30,x
6,14
=
‑
20;
[0181]
x
6,21
=
‑
30,x
6,22
=
‑
20,x
6,23
=
‑
15,x
6,24
=
‑
13;
[0182]
x
6,31
=
‑
15,x
6,32
=
‑
13,x
6,33
=
‑
11,x
6,34
=
‑
9;
[0183]
x
6,41
=
‑
11,x
6,42
=
‑
9,x
6,43
=
‑
8,x
6,44
=
‑
7;
[0184]
x
6,51
=
‑
8,x
6,52
=
‑
7,x
6,53
=
‑
5,x
6,54
=
‑
4;
[0185]
x
6,61
=
‑
5,x
6,62
=
‑
4,x
6,63
=
‑
3,x
6,64
=
‑
2;
[0186]
x
6,71
=
‑
3,x
6,72
=
‑
2,x
6,73
=
‑
1,x
6,74
=0;
[0187]
其中针对作用空间f7,具体的配置参数如下:
[0188]
m=7,n=7;
[0189]
r
7,1
=
‑
19,r
7,2
=
‑
19,r
7,3
=
‑
13,r
7,4
=
‑
9,r
7,5
=
‑
5,r
7,6
=
‑
3,r
7,7
=
‑
1;
[0190]
x
7,11
=
‑
1000,x
7,12
=
‑
300,x
7,13
=
‑
30,x
7,14
=
‑
20;
[0191]
x
7,21
=
‑
30,x
7,22
=
‑
20,x
7,23
=
‑
15,x
7,24
=
‑
13;
[0192]
x
7,31
=
‑
15,x
7,32
=
‑
13,x
7,33
=
‑
11,x
7,34
=
‑
9;
[0193]
x
7,41
=
‑
11,x
7,42
=
‑
9,x
7,43
=
‑
8,x
7,44
=
‑
7;
[0194]
x
7,51
=
‑
8,x
7,52
=
‑
7,x
7,53
=
‑
5,x
7,54
=
‑
4;
[0195]
x
7,61
=
‑
5,x
7,62
=
‑
4,x
7,63
=
‑
3,x
7,64
=
‑
2;
[0196]
x
7,71
=
‑
3,x
7,72
=
‑
2,x
7,73
=
‑
1,x
7,74
=0;
[0197]
其中针对作用空间f8,具体的配置参数如下:
[0198]
m=8,n=7;
[0199]
r
8,1
=
‑
17,r
8,2
=
‑
17,r
8,3
=
‑
11,r
8,4
=
‑
7,r
8,5
=
‑
4,r
8,6
=
‑
2,r
8,7
=0;
[0200]
x
8,11
=
‑
1000,x
8,12
=
‑
300,x
8,13
=
‑
30,x
8,14
=
‑
20;
[0201]
x
8,21
=
‑
30,x
8,22
=
‑
20,x
8,23
=
‑
15,x
8,24
=
‑
13;
[0202]
x
8,31
=
‑
15,x
8,32
=
‑
13,x
8,33
=
‑
11,x
8,34
=
‑
9;
[0203]
x
8,41
=
‑
11,x
8,42
=
‑
9,x
8,43
=
‑
8,x
8,44
=
‑
7;
[0204]
x
8,51
=
‑
8,x
8,52
=
‑
7,x
8,53
=
‑
5,x
8,54
=
‑
4;
[0205]
x
8,61
=
‑
5,x
8,62
=
‑
4,x
8,63
=
‑
3,x
8,64
=
‑
2;
[0206]
x
8,71
=
‑
3,x
8,72
=
‑
2,x
8,73
=
‑
1,x
8,74
=0;
[0207]
3、结合步骤1)和步骤2)中所建立的燃煤机组主汽温度一维多象限模糊判断空间和燃 煤机组主汽温度一维多象限模糊控制空间,建立燃煤机组主汽温度一维多象限模糊作用空间, 并最终获得燃煤机组主汽温度一维多象限模糊控制作用量,如附图3所示,具体原理如下:
[0208]
如前所述,每一个判断空间均存在一个对应的作用空间,如图3所示,例如当s1=1时, 延时t
d
被触发,则f1进入下行通道;而s1~s8在同一时刻只能有一个判断空间被触发,最终的 下行通道输出值与缩放因子s
ca
相乘,并经过滤波环节,滤波作用机理为:
[0209][0210]
其中m、m'分别为滤波前后滤波后的值,t
l
为滤波作用时间;经过滤波后获得的最终值 f即为燃煤机组主汽温度一维多象限模糊控制作用量;上式中,s
ca
=1.0,t
l
=1s,t
d
=3s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1