一种无人机的拍摄控制方法及装置
1.本发明涉及无人机的技术领域,尤其涉及一种无人机的拍摄控制方法及装置。
背景技术:
2.随着无人机的普及化,采用无人机拍照已广泛应用在智慧城市建设、农村房地一体化、考古研究、工程实施等领域。
3.为了提高拍摄质量和照片清晰度,会在无人机中搭载一个或多个镜头的相机,在使用时同步曝光一个或多个镜头进行多角度拍摄,从而获取多个角度的照片。
4.但目前的拍摄模式存有以下技术问题:若采用单镜头拍摄,每次拍摄角度的单一,需要设置多个方向的拍摄航线进行重复拍摄才能得到多个角度的照片,整个拍摄的耗时长且效率低;而采用多镜头拍摄,则需要在拍摄前分别设定各个镜头的焦距、分辨率和航向重叠度等参数,操作步骤复杂,且多镜头拍摄的照片数量大,照片重复率高,增加了后期处理时长,进一步降低了处理效率。
技术实现要素:
5.本发明提出一种无人机的拍摄控制方法及装置,所述方法可以减少拍摄航线,缩短拍摄时长,降低拍摄重复率,提高拍摄效率。
6.本发明实施例的第一方面提供了一种无人机的拍摄控制方法,所述方法包括:
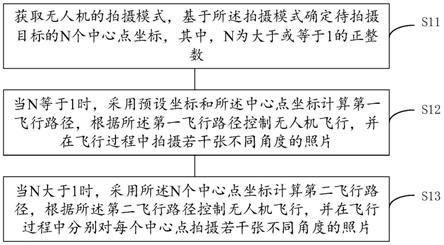
7.获取无人机的拍摄模式,基于所述拍摄模式确定待拍摄目标的n个中心点坐标,其中,n为大于或等于1的正整数;
8.当n等于1时,采用预设坐标和所述中心点坐标计算第一飞行路径,根据所述第一飞行路径控制无人机飞行,并在飞行过程中拍摄若干张不同角度的照片;
9.当n大于1时,采用所述n个中心点坐标计算第二飞行路径,根据所述第二飞行路径控制无人机飞行,并在飞行过程中分别对每个中心点拍摄若干张不同角度的照片。
10.在第一方面的一种可能的实现方式中,所述基于所述拍摄模式确定待拍摄目标的n个中心点坐标,包括:
11.所述拍摄模式包括线拍摄模式;
12.当确定所述拍摄模式为线拍摄模式时,获取用户输入的连接线段,所述连接线段为用户划定的多段折线;
13.以所述连接线段的任意一个端点为起点,根据预设的第一间距从所述连接线段中提取至少两个中心点坐标。
14.在第一方面的一种可能的实现方式中,所述基于所述拍摄模式确定待拍摄目标的n个中心点坐标,包括:
15.所述拍摄模式包括面拍摄模式;
16.当确定所述拍摄模式为面拍摄模式时,获取多条相互平行的平行航线,其中,相邻的平行航线相互之间的间隔为预设的第二间距;
17.根据预设的第三间距分别从每条平行航线中提取至少两个中心点坐标,得到若干个中心点坐标,其中,每个中心点坐标均以预设的第四间距作半径形成一个中心圆形区域,得到若干个中心圆形区域,所述若干个中心圆形区域的面积总和大于待拍摄目标的平面面积,且相邻的平行航线的中心点坐标相互之间在垂直平分线上错开,所述预设的第三间距大于所述预设的第二间距,所述预设的第二间距大于或等于预设的第四间距。
18.在第一方面的一种可能的实现方式中,所述基于所述拍摄模式确定待拍摄目标的n个中心点坐标,包括:
19.所述拍摄模式包括点拍摄模式;
20.当确定所述拍摄模式为点拍摄模式时,接收用户输入的n个中心点坐标,每个中心点坐标为用户确定每个待拍摄目标对应的拍摄目标坐标后得到,其中,n为大于或等于1的正整数。
21.在第一方面的一种可能的实现方式中,所述采用预设坐标和所述中心点坐标计算第一飞行路径,包括:
22.采用预设坐标与所述中心点坐标计算第一拍摄起点坐标;
23.根据预设的第一拍摄照片数量和预设的第一飞行距离计算第一拍摄终点坐标;
24.以预设的第一飞行距离为半径,以所述中心点坐标为圆心,将预设坐标、所述第一拍摄起点坐标与所述第一拍摄终点坐标连接成包围所述中心点坐标的第一圆弧得到第一飞行路径。
25.在第一方面的一种可能的实现方式中,所述采用所述n个中心点坐标计算第二飞行路径,包括:
26.计算每个中心点坐标的方向角和坐标距离;
27.根据每个中心点坐标的方向角和坐标距离分别确定每个中心点坐标对应的拍摄路径,得到n个拍摄路径;
28.将所述n个拍摄路径首尾连接形成第二飞行路径。
29.在第一方面的一种可能的实现方式中,所述计算每个中心点坐标的方向角和坐标距离,包括:
30.将第一中心点坐标与相邻的第二中心点坐标进行坐标距离计算,得到第一中心点坐标对应的坐标距离;
31.将第一中心点与相邻的第三中心点坐标进行方向角计算,得到第一中心点坐标对应的方向角。
32.在第一方面的一种可能的实现方式中,所述根据每个中心点坐标的方向角和坐标距离分别确定每个中心点坐标对应的拍摄路径,包括:
33.采用所述第一中心点坐标对应的坐标距离与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄起点坐标;
34.采用所述第一中心点坐标对应的方向角与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄终点坐标;
35.以预设的第二飞行距离为半径,以所述第一中心点坐标为圆心,将所述第二拍摄起点坐标与所述第二拍摄终点坐标连接成包围所述中心点坐标的第二圆弧,得到第一中心点坐标的拍摄路径。
36.本发明实施例的第二方面提供了一种无人机的拍摄控制装置,所述装置包括:
37.获取模块,用于获取无人机的拍摄模式,基于所述拍摄模式确定待拍摄目标的n个中心点坐标,其中,n为大于或等于1的正整数;
38.第一飞行路径模块,用于当n等于1时,采用预设坐标和所述中心点坐标计算第一飞行路径,根据所述第一飞行路径控制无人机飞行,并在飞行过程中拍摄若干张不同角度的照片;
39.第二飞行路径模块,用于当n大于1时,采用所述n个中心点坐标计算第二飞行路径,根据所述第二飞行路径控制无人机飞行,并在飞行过程中分别对每个中心点拍摄若干张不同角度的照片。
40.相比于现有技术,本发明实施例提供的无人机的拍摄控制方法及装置,其有益效果在于:本发明可以根据拍摄模式确定需要环绕飞行以及需要拍摄的中心点坐标,并且根据中心点坐标确定对应的飞行路径,从而可以减少拍摄所需的飞行航线,缩短飞行时间,同时每次拍摄均是对待拍摄目标作均匀,可以减少照片数量,减少重复拍摄,提高数据处理效率。
附图说明
41.图1是本发明一实施例提供的一种无人机的拍摄控制方法的流程示意图;
42.图2是本发明一实施例提供的无人机点拍摄模式的飞行示意图;
43.图3是本发明一实施例提供的无人机线拍摄模式的飞行示意图;
44.图4是本发明一实施例提供的多条平行航线的结构示意图;
45.图5是本发明一实施例提供的无人机面拍摄模式的飞行示意图;
46.图6是本发明一实施例提供的无人机拍摄结构示意图一;
47.图7是本发明一实施例提供的无人机拍摄结构示意图二;
48.图8是本发明一实施例提供的无人机飞行距离计算示意图;
49.图9是本发明一实施例提供的一种无人机的拍摄控制装置的结构示意图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.目前的拍摄模式分为单镜头拍摄和多镜头拍摄,采用单镜头拍摄,每次拍摄角度的单一,需要设置多个方向的拍摄航线进行重复拍摄才能得到多个角度的照片,整个拍摄的耗时长且效率低;而采用多镜头拍摄,则需要在拍摄前分别设定各个镜头的焦距、分辨率和航向重叠度等参数,操作步骤复杂,且多镜头拍摄的照片数量大,照片重复率高,增加了后期处理时长,降低了图像处理效率。
52.为了解决上述问题,下面将通过以下具体的实施例对本申请实施例提供的一种无人机的拍摄控制方法进行详细介绍和说明。
53.参照图1,示出了本发明一实施例提供的一种无人机的拍摄控制方法的流程示意
图。
54.其中,作为示例的,所述无人机的拍摄控制方法可以应用于无人机的控制系统,该控制系统可以搭载在无人机中,并控制无人机执行操作飞行和拍摄等操作。
55.具体地,所述无人机的拍摄控制方法可以包括:
56.s11、获取无人机的拍摄模式,基于所述拍摄模式确定待拍摄目标的n个中心点坐标,其中,n为大于或等于1的正整数。
57.在本实施例中,拍摄模式可以根据待拍摄目标的大小或数量确定,具体可以由用户选择,并由用户输入至控制系统中。该中心点坐标可以为待拍摄目标的中心点位置坐标,也可以是处在待拍摄目标周边或处在待拍摄目标内的坐标。
58.由于待拍摄目标可能是单个,中心点坐标可以是1个,若待拍摄目标为多个时,中心点坐标可以是多个,若待拍摄目标为大面积的区域或物体时,为了避免派送遗漏,中心点坐标也可以是多个。
59.参照图2,示出了本发明一实施例提供的无人机点拍摄模式的飞行示意图。在其中一种实施例中,所述拍摄模式包括点拍摄模式。该点拍摄模式为用户在确定一个或多个待拍摄目标后,分别对一个或多个待拍摄目标作单独拍摄的模式。多个待拍摄目标相互之间可以独立的,也可以是并排的。
60.其中,作为示例的,步骤s11可以包括以下子步骤:
61.子步骤s111、当确定所述拍摄模式为点拍摄模式时,接收用户输入的n个中心点坐标,每个中心点坐标为用户确定每个待拍摄目标对应的拍摄目标坐标后得到,其中,n为大于或等于1的正整数。
62.在实际操作中,当用户确定一个或多个待拍摄目标后,可以分别确定每个待拍摄目标的坐标,以每个待拍摄目标的坐标为每个待拍摄目标的中心点坐标,得到n个中心点坐标,向控制系统发送点拍摄模式以及n个中心点坐标,让控制系统可以根据点拍摄模式,分别以每个中心点坐标为圆心,在相对的飞行高度环绕飞行一圈,并均匀拍摄若干张图像,从而得到每个待拍摄目标的若干张图像。
63.参照图3,示出了本发明一实施例提供的无人机线拍摄模式的飞行示意图。在另一种实施例中,所述拍摄模式还可以包括线拍摄模式,该线拍摄模式为根据用户划定的连接线段为飞行方向,在飞行方向上分别围绕n个中心点坐标飞行与拍摄的模式。
64.其中,作为示例的,步骤s11可以还包括以下子步骤:
65.子步骤s112、当确定所述拍摄模式为线拍摄模式时,获取用户输入的连接线段,所述连接线段为用户划定的多段折线。
66.该连接线段如图3所示,用户可以自行根据实际情况划定多段折线,多段折线可以根据待拍摄目标确定,例如,待拍摄目标为一个三角形,可以划定一条与三角形的边长相同多段折线;又例如,待拍摄目标为一条河流,可以根据河流流动的形状划定一条多段折线。
67.子步骤s113、以所述连接线段的任意一个端点为起点,根据预设的第一间距从所述连接线段中提取至少两个中心点坐标。
68.参照图3,在接收连接线段后,可以以连接线段的任意一个端点为起点,并按照预设的第一间距从连接线段提取若干个中心点坐标。
69.由于无人机是以中心点坐标为圆心,在一定航行高度处围绕该中心点坐标飞行并
拍摄,使得无人机在围绕每个中心点坐标飞行时均会形成一个中心圆形区域。为了能确保每次围绕一个中心点坐标拍摄时均能拍摄完整,从而避免拍摄遗漏的情况,相邻的中心圆形区域会有一定的重叠,再根据相邻的中心圆形区域的重叠度确定预设的第一间距。
70.具体地,无人机围绕中心点坐标飞行的半径为r,形成的中心圆形区域的直径为d(d=2r),重叠度为px,假设可以沿连接线段生成的多个中心点坐标分别为t0
‑
t1
‑
t2...tn,相邻中心点坐标的间距为d(1
‑
px)。例如,重叠度为70%,无人机围绕中心点坐标飞行的半径为1米,预设的第一间距为2*(1
‑
0.7)=0.6米。以连接线段的其中一个端点为起点,作为第一个中心点坐标t0,然后在连接线段上提取与t0间隔0.6米的点为第二个中心点坐标t1,如此类推。
71.在连接线段的其中一段连接线中,若在该连接线的拐点与某一中心点坐标tn
‑
1的间距小于预设的第一间距时,可以从下一段连接线中提取与该中心点坐标tn
‑
1直线坐标距离为预设的第一间距的点为下一个中心点坐标tn;又或是以两条连接线的拐点坐标作为下一个中心点坐标tn。
72.参照图4
‑
5,分别示出了本发明一实施例提供的多条平行航线的结构示意图和本发明一实施例提供的无人机面拍摄模式的飞行示意图。由于待拍摄目标可能是某一区域,例如一栋建筑、一个公园或者一个区域,若采用线拍摄模式只能拍摄待拍摄目标的周边,对于待拍摄目标的内部难以拍摄,为了避免遗漏,可以设定面拍摄模式,对待拍摄目标整个平面进行拍摄。该面拍摄模式为根据用户设定的多条覆盖待拍摄目标的平行线,以平行线为飞行方向,在每个飞行方向上分别围绕该条平行线的若干个中心点坐标飞行拍摄的模式。
73.在另一种实施例中,所述拍摄模式还可以包括面拍摄模式,其中,作为示例的,步骤s11可以还包括以下子步骤:
74.子步骤s114、当确定所述拍摄模式为面拍摄模式时,获取多条相互平行的平行航线,其中,相邻的平行航线相互之间的间隔为预设的第二间距。
75.参照图4
‑
5,用户可以确定待拍摄目标后,可以根据实际需要确定多条相互平行的平行航线。多条平行的平行航线可以首尾连接,且相邻的平行航线的飞行方向相反,从而可以让无人机可以根据飞行方向航行。而多条平行航线既可以确保无人机在飞行时能拍摄到待拍摄目标的内部或中间区域,同时也可以减少拍摄所需的飞行路端,缩短飞行时间,提高拍摄效率。
76.另外,为了能确保待拍摄目标的内部或中间区域有拍摄遗漏的情况,相邻的平行航线相互之间的间隔为预设的第二间距。
77.参照图4
‑
5,让相邻的平行航线相互之间的间隔保持在预设的第二间距,可以让无人机在围绕相邻的平行航线的中心点坐标飞行时,相邻的平行航线上的中心圆形区域相互之间可以有一定重叠,从而避免拍摄遗漏的情况。
78.子步骤s115、根据预设的第三间距分别从每条平行航线中提取至少两个中心点坐标,得到若干个中心点坐标,其中,每个中心点坐标均以预设的第四间距作半径形成一个中心圆形区域,得到若干个中心圆形区域,所述若干个中心圆形区域的面积总和大于待拍摄目标的平面面积,且相邻的平行航线的中心点坐标相互之间在垂直平分线上错开,所述预设的第三间距大于所述预设的第二间距,所述预设的第二间距大于或等于预设的第四间距。
79.在本实施例中,可以根据预设的第三间距分别从每条平行航线中提取至少两个中心点坐标。该提取方式也可以与线拍摄模式的提取方式相同,例如,对第一条平行航线进行提取,可以以第一条平行航线的非连接端点为第一条平行航线的第一个中心点坐标t1,然后在第一条平行航线上获取与第一个中心点坐标间隔预设的第三间距的点为第二个中心点坐标t2,如此类推。若第一条平行航线与第二条平行航线连接的连接线的连接端点与在先一个中心点坐标tn
‑
1的间距小于预设的第三间距时,可以采用第一条平行航线与第二条平行航线的连接端点为下一个中心点坐标tn。在提取完第一条平行航线后,可以提取第二条平行航线的中心点坐标。
80.在本实施例中,由于为了让相邻的平行航线上的中心圆形区域也能重叠,所以相邻的平行航线的中心点坐标相互之间在垂直平分线上错开。具体如图4
‑
5所示。
81.具体地,当相邻的平行航线的首尾连接线不是平行航线的垂线,则可以以平行航线与连接线的连接端为该条平行航线的第一个中心点坐标,然后再以预设的第三间距进行提取。例如,在第二条平行航线中提取中心点坐标时,若第二条平行航线与第一条平行航线的连接线不是第二条平行航线的垂线,可以以第二条平行航线与第一条平行航线的连接线的连接端为第二条平行航线的第一个中心点坐标t21,然后在第二条平行航线上获取与第一个中心点坐标t21间隔预设的第三间距的点为第二个中心点坐标t22,如此类推。若第二条平行航线与第三条平行航线连接的连接线的连接端点与在先一个中心点坐标t2n
‑
1的间距小于预设的第三间距时,可以采用第二条平行航线与第三条平行航线的连接端点为下一个中心点坐标t2n。
82.当相邻的平行航线的首尾连接线是平行航线的垂线时,则可以以平行航线与连接线的连接端为起点,与该起点间隔预设的第五间距的坐标点为该条平行航线的第一个中心点坐标。该预设的第五间距小于或等于二分之一的预设的第三间距。例如,在第三条平行航线中提取中心点坐标时,若第三条平行航线与第二条平行航线的连接线是第三条平行航线的垂线,可以以第三条平行航线与第二条平行航线的连接线的连接端为第三条平行航线的起点,然后查找与该起点间隔为预设的第五间距的坐标点为第三条平行航线的第一个中心点坐标t31,然后在第三条平行航线上获取与第一个中心点坐标t31间隔预设的第三间距的点为第二个中心点坐标t32,如此类推。
83.上述两种提取方式可以使得相邻的平行航线的中心点坐标可以在垂线上相互错开,确保相邻的平行航线的中心点坐标形成的中心圆形区域也能相互重叠,具体如图4
‑
5所示。
84.由于相邻的平行航线的中心点坐标形成的中心圆形区域能相互重叠,所以在相邻的平行航线的连接线上,无人机可以不进行环绕拍摄的情况下也能拍摄待拍摄目标的内部,从而可以确保照片质量与数量的同时缩短无人机的飞行距离,提高拍摄效率。
85.在具体实现中,为了尽可能地缩短无人机的飞行距离,预设的第二间距大于或等于预设的第四间距。
86.另外,由于待拍摄目标的面积可能相对较大,为了避免拍摄遗漏的情况,平行航线的长度大于该待拍摄目标的边长,相邻的平行航线的连接线长度总和大于待拍摄目标的高,且所有中心点坐标形成的中心圆形区域面积总和大于待拍摄目标的面积。具体如图4
‑
5所示。
87.参照图6
‑
7,分别示出了本发明一实施例提供的无人机拍摄结构示意图一和本发明一实施例提供的无人机拍摄结构示意图二。
88.在实际操作中,无人机在围绕中心点坐标飞行时,可以根据以下飞行参数进行飞行和拍摄,该飞行参数具体如下:
89.图像像元大小:p
90.相机焦距:f
91.相机传感器尺寸x:cx
92.相机传感器尺寸y:cy
93.图像像幅长(像素):tx
94.图像像幅宽(像素):ty
95.相机垂直高度:h
96.倾斜拍摄时拍摄中心与地面点距离:hq
97.影像地面分辨率:gsd
98.环绕一圈拍摄照片张数:m
99.环绕飞行的半径:r(其中r=预设的第四间距)
100.航向相邻环绕圆形重叠度:px
101.旁向相邻航线环绕圆形重叠度:py
102.相机横向广角:
103.单张倾斜照片覆盖地面长度为:d=h*tan(π/4+α/2)
104.其中,各个参数可以根据用户的实际需要进行调整,若用户需要清晰拍摄待拍摄目标的细节,可以适当调整拍摄张数和像素等参数,若需要拍摄待拍摄目标的轮廓,可以适当增加拍摄高度减少拍摄张数等。
105.在实际操作中,像元大小、地面分辨率、焦距以及航高存在以下比例关系:
[0106][0107]
而在倾斜拍摄过程中,倾斜角度一般为45,因此,倾斜拍摄时拍摄中心与地面点距离:待拍摄目标的中心点坐标与无人机的相机中心的水平距离也为h。具体如图6
‑
7所示。然后无人机按照上述参数围绕中心点坐标飞行与拍摄。在拍摄照片时,可以进行均匀拍摄,例如,拍摄照片为10张,则每隔36度拍摄一张,若拍摄36张,则每隔10度拍摄一张,如此类推。
[0108]
s12、当n等于1时,采用预设坐标和所述中心点坐标计算第一飞行路径,根据所述第一飞行路径控制无人机飞行,并在飞行过程中拍摄若干张不同角度的照片。
[0109]
若中心点坐标为一个时,可以以预设坐标和该中心点坐标第一飞行路径,然后根据第一飞行路径控制无人机飞行,并在飞行过程中拍摄若干张不同角度的照。该预设坐标为无人机的当前坐标或无人机的起点坐标。
[0110]
参照图8,示出了本发明一实施例提供的无人机飞行距离计算示意图。为了能让无人机能尽可能地围绕中心点坐标飞行并避免拍摄遗漏的情况,其中,作为示例的,步骤s12可以包括以下子步骤:
[0111]
子步骤s121、采用预设坐标与所述中心点坐标计算第一拍摄起点坐标。
[0112]
子步骤s122、根据预设的第一拍摄照片数量和预设的第一飞行距离计算第一拍摄终点坐标。
[0113]
具体地,设定当前坐标ti的平面坐标为(xi,yi),下一个中心点坐标ti+1的平面坐标为(x
i+1
,y
i+1
),飞行拍摄的高度均为h。
[0114]
当前坐标ti与中心点坐标ti+1的直连线段为titi+1,以中心点坐标ti+1为圆心,r为半径,可以构成一个中心圆形区域oi+1,直连线段titi+1与中心圆形区域oi+1的交点即为第一拍摄起点qi+1,该第一拍摄起点的坐标为第一拍摄起点坐标
[0115]
具体的如下:
[0116]
直连线段titi+1的长度l计算公式为:
[0117][0118]
则qi+1点的平面坐标的具体技术如下:
[0119][0120][0121]
由于只有一个中心点坐标,可以根据拍摄图片的数量计算第一拍摄终点坐标zi+1。例如,根据拍摄图片的数量为36张,则确定第一拍摄起点坐标与第一拍摄终点坐标的角度差为10度,将第一拍摄起点坐标与中心点坐标连接,并以中心点坐标为圆心顺时针或逆时针旋转10度后得到的坐标为第一拍摄终点坐标(x
zi+1
,y
zi+1
)。
[0122]
子步骤s123、以预设的第一飞行距离为半径,以所述中心点坐标为圆心,将预设坐标、所述第一拍摄起点坐标与所述第一拍摄终点坐标连接成包围所述中心点坐标的第一圆弧得到第一飞行路径。
[0123]
若是顺时针得到第一拍摄终点坐标,则将当前坐标(xi,yi)与第一拍摄起点坐标连接,然后将第一拍摄起点坐标和第一拍摄终点坐标(x
zi+1
,y
zi+1
)以中心点坐标为圆心逆时针连接,从而得到第一飞行路径。若是逆时针得到第一拍摄终点坐标,则将当前坐标(xi,yi)与第一拍摄起点坐标连接,然后将第一拍摄起点坐标和第一拍摄终点坐标(x
zi+1
,y
zi+1
)以中心点坐标为圆心顺时针连接,从而得到第一飞行路径。
[0124]
s13、当n大于1时,采用所述n个中心点坐标计算第二飞行路径,根据所述第二飞行路径控制无人机飞行,并在飞行过程中分别对每个中心点拍摄若干张不同角度的照片。
[0125]
当n大于1时,则确定包含多个中心点坐标,可以利用多个中心点坐标计算第二飞行路径,使得第二飞行路径可以完全包围多个中心点坐标,让无人机可以分别围绕多个中心点坐标飞行,并在飞行过程中分别对每个中心点坐标进行拍摄,拍摄得到每个中心点坐标对应的若干张图片。
[0126]
其中,作为示例的,步骤s13可以包括以下子步骤:
[0127]
子步骤s131、计算每个中心点坐标的方向角和坐标距离。
[0128]
由于要将第二飞行路径包含n个中心点坐标,所以可以分别计算每个中心点坐标的方向角和坐标距离,从而通过方向角和坐标距离确定相邻的中心点坐标的关系。
[0129]
其中,作为示例的,子步骤s131可以包括以下子步骤:
[0130]
子步骤s1311、将第一中心点坐标与相邻的第二中心点坐标进行坐标距离计算,得到第一中心点坐标对应的坐标距离。
[0131]
在本实施例中,该坐标距离的计算也可以与上述的直连线段的计算方式相同。具体地,该第一中心点坐标ti+1为任意一个中心点坐标例如有n个中心点坐标,第一中心点坐标可以是t1、t2
…
.至tn。第二中心点坐标ti是第一中心点坐标ti+1在无人机的飞行方向上在先的中心点坐标,该第二中心点坐标为(xi,yi),例如,若第一中心点坐标是t1,则第二中心点坐标为无人机的当前坐标,若第一中心点坐标是t2,则第二中心点坐标为第一个中心点坐标是t1,若第一中心点坐标是tn,则第二中心点坐标为第n
‑
1个中心点坐标是tn
‑
1。第一中心点坐标与第二中心点坐标的坐标距离为titi+1。
[0132]
坐标距离titi+1的长度l计算公式为:
[0133][0134]
子步骤s1312、将第一中心点与相邻的第三中心点坐标进行方向角计算,得到第一中心点坐标对应的方向角。
[0135]
该第三中心点坐标为第一中心点坐标ti+1在无人机的飞行方向上在后的中心点坐标,该第三中心点坐标为(x
qi+2
,y
qi+2
)。
[0136]
该第一中心点坐标对应的方向角为α
i+1
,具体计算如下:
[0137][0138]
在具体实现中,可以根据上述计算方式分别计算每个中心点坐标的坐标距离和方向角。
[0139]
另外需要说明的是,为了提高计算效率,若该第一中心点坐标是最后一个中心点坐标tn,可以不计算该最后一个中心点坐标tn的方向角和坐标距离。
[0140]
子步骤s132、根据每个中心点坐标的方向角和坐标距离分别确定每个中心点坐标对应的拍摄路径,得到n个拍摄路径。
[0141]
然后可以分别采用每个中心点坐标的方向角和坐标距离计算围绕每个中心点坐标的起点与终点,再通过起点与终点确定该中心点坐标对应的拍摄路径。
[0142]
在具体实现中,为了减少无人机的飞行距离,准确计算无人机围绕每个中心点坐标飞行的起点与终端,其中,作为示例的,子步骤s132可以包括以下子步骤:
[0143]
子步骤s1321、采用所述第一中心点坐标对应的坐标距离与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄起点坐标。
[0144]
在本实施例中,该第二拍摄起点坐标的计算方式与上述第一拍摄起点坐标的计算方式相同,为了避免重复,可以参照上述描述,在此不再赘述。
[0145]
子步骤s1322、采用所述第一中心点坐标对应的方向角与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄终点坐标。
[0146]
在获取第一中心点坐标对应的方向角后,可以计算第二拍摄终点坐标与第一中心点坐标对应的终点方向角β
i+1
。
[0147]
具体地,可以先根据第二拍摄终点坐标与第一中心点坐标之间的象限关系确定第一中心点坐标对应的方向角。其中该象限关系具体为:若α
i+1
在第一象限,则方向角保持不变;若α
i+1
在第二象限,则方向角为180
‑
α
i+1
;若α
i+1
在第三象限,则方向角为180+α
i+1
;若α
i+1
在第四象限,则方向角为360
‑
α
i+1
。在确定第一中心点坐标对应的方向角后,通过以下计算方式计算终点方向角β
i+1
:
[0148]
β
i+1
=α
i+1
‑
2π/m。
[0149]
已知第一中心点坐标ti+1的坐标和终点方向角β
i+1
,可以计算第二拍摄终点坐标(x
zi+1
,y
zi+1
):
[0150]
x
zi+1
=x
i+1
+r*cos(β
i+1
)
[0151]
y
zi+1
=y
i+1
+r*cos(β
i+1
)
[0152]
子步骤s1323、以预设的第二飞行距离为半径,以所述第一中心点坐标为圆心,将所述第二拍摄起点坐标与所述第二拍摄终点坐标连接成包围所述中心点坐标的第二圆弧,得到第一中心点坐标的拍摄路径。
[0153]
在得到第二拍摄起点坐标与第二拍摄终点坐标后,可以将第二拍摄起点坐标与第二拍摄终点坐标连接起来,形成包围中心点坐标的第二圆弧,得到第一中心点坐标的拍摄路径。
[0154]
按照相同计算方式分别计算每个中心点坐标对应的拍摄路径,得到n个拍摄路径。
[0155]
具体地,该第二圆弧的圆周角为无人机拍摄若干张照片所环绕中心点坐标飞行的角度。例如,拍摄36张照片,则无人机需要环绕中心点坐标飞行350度。
[0156]
子步骤s133、将所述n个拍摄路径首尾连接形成第二飞行路径。
[0157]
具体地,可以从无人机的当前坐标与第一中心点坐标的拍摄路径的第二拍摄起点坐标连接,然后将第一中心点坐标的拍摄路径的第二拍摄终端坐标与第二中心点坐标的拍摄路径的第二拍摄起点坐标连接,接着将第二中心点坐标的拍摄路径的第二拍摄终端坐标与第三中心点坐标的拍摄路径的第二拍摄起点坐标连接,如此类推,直到第n
‑
1中心点坐标的拍摄路径的第二拍摄终端坐标与第n中心点坐标的拍摄路径的第二拍摄起点坐标连接,得到第二飞行路径。
[0158]
最后在得到第二飞行路径后,可以根据第二飞行路径控制无人机飞行,并在无人机围绕任意一个中心点坐标飞行时,拍摄若干张图像。
[0159]
在本实施例中,本发明实施例提供了一种无人机的拍摄控制方法,其有益效果在于:第一、与传统的拍摄相比,本发明以最便捷的飞行平台搭载单镜头相机即可完成,减少飞行平台的设备投入,减少相机的投入,降低了飞行风险;第二、本发明可以在减少飞行路径和飞行时间的同时实现对待拍摄目标进行环绕飞行和多角度拍摄,大大提高拍摄效率以及建模效果;第三、每次环绕倾斜拍摄均朝着目标地物拍摄,减少冗余数据,节省硬盘存储空间,提升后续数据处理效率。
[0160]
本发明实施例还提供了一种无人机的拍摄控制装置,参见图9,示出了本发明一实施例提供的一种无人机的拍摄控制装置的结构示意图。
[0161]
其中,作为示例的,所述无人机的拍摄控制装置可以包括:
[0162]
获取模块901,用于获取无人机的拍摄模式,基于所述拍摄模式确定待拍摄目标的n个中心点坐标,其中,n为大于或等于1的正整数;
[0163]
第一飞行路径模块902,用于当n等于1时,采用预设坐标和所述中心点坐标计算第一飞行路径,根据所述第一飞行路径控制无人机飞行,并在飞行过程中拍摄若干张不同角度的照片;
[0164]
第二飞行路径模块903,用于当n大于1时,采用所述n个中心点坐标计算第二飞行路径,根据所述第二飞行路径控制无人机飞行,并在飞行过程中分别对每个中心点拍摄若干张不同角度的照片。
[0165]
进一步的,所述获取模块还用于:
[0166]
所述拍摄模式包括线拍摄模式;
[0167]
当确定所述拍摄模式为线拍摄模式时,获取用户输入的连接线段,所述连接线段为用户划定的多段折线;
[0168]
以所述连接线段的任意一个端点为起点,根据预设的第一间距从所述连接线段中提取至少两个中心点坐标。
[0169]
进一步的,所述获取模块还用于:
[0170]
所述拍摄模式包括面拍摄模式;
[0171]
当确定所述拍摄模式为面拍摄模式时,获取多条相互平行的平行航线,其中,相邻的平行航线相互之间的间隔为预设的第二间距;
[0172]
根据预设的第三间距分别从每条平行航线中提取至少两个中心点坐标,得到若干个中心点坐标,其中,每个中心点坐标均以预设的第四间距作半径形成一个中心圆形区域,得到若干个中心圆形区域,所述若干个中心圆形区域的面积总和大于待拍摄目标的平面面积,且相邻的平行航线的中心点坐标相互之间在垂直平分线上错开,所述预设的第三间距大于所述预设的第二间距,所述预设的第二间距大于或等于预设的第四间距。
[0173]
进一步的,所述获取模块还用于:
[0174]
所述拍摄模式包括点拍摄模式;
[0175]
当确定所述拍摄模式为点拍摄模式时,接收用户输入的n个中心点坐标,每个中心点坐标为用户确定每个待拍摄目标对应的拍摄目标坐标后得到,其中,n为大于或等于1的正整数。
[0176]
进一步的,所述第一飞行路径模块还用于:
[0177]
采用预设坐标与所述中心点坐标计算第一拍摄起点坐标;
[0178]
根据预设的第一拍摄照片数量和预设的第一飞行距离计算第一拍摄终点坐标;
[0179]
以预设的第一飞行距离为半径,以所述中心点坐标为圆心,将预设坐标、所述第一拍摄起点坐标与所述第一拍摄终点坐标连接成包围所述中心点坐标的第一圆弧得到第一飞行路径。
[0180]
进一步的,所述第二飞行路径模块还用于:
[0181]
计算每个中心点坐标的方向角和坐标距离;
[0182]
根据每个中心点坐标的方向角和坐标距离分别确定每个中心点坐标对应的拍摄路径,得到n个拍摄路径;
[0183]
将所述n个拍摄路径首尾连接形成第二飞行路径。
[0184]
在第二方面的一种可能的实现方式中,所述第二飞行路径模块还用于:
[0185]
将第一中心点坐标与相邻的第二中心点坐标进行坐标距离计算,得到第一中心点坐标对应的坐标距离;
[0186]
将第一中心点与相邻的第三中心点坐标进行方向角计算,得到第一中心点坐标对应的方向角。
[0187]
进一步的,所述第二飞行路径模块还用于:
[0188]
采用所述第一中心点坐标对应的坐标距离与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄起点坐标;
[0189]
采用所述第一中心点坐标对应的方向角与所述第一中心点坐标计算第一中心点坐标对应的第二拍摄终点坐标;
[0190]
以预设的第二飞行距离为半径,以所述第一中心点坐标为圆心,将所述第二拍摄起点坐标与所述第二拍摄终点坐标连接成包围所述中心点坐标的第二圆弧,得到第一中心点坐标的拍摄路径。
[0191]
进一步的,本申请实施例还提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例所述的无人机的拍摄控制方法。
[0192]
进一步的,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上述实施例所述的无人机的拍摄控制方法。
[0193]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1