一种无人机自动除草作业方法
1.本发明涉及无人机除草方法,具体涉及一种无人机自动除草作业方法。
背景技术:
2.清除田间杂草是一项重要的植保工作。目前,农田的除草工作主要依靠地面机械执行,作业机械通过轮子和履带的方式在田中移动,其移动速度慢,移动方向受到限制。由于农田中的作物种植密集,不利于地面机械在田中行走,限制了机器的作业。为了方便地面机械的作业,需在田中预留一定的行走空间,这样不仅浪费了田地,还无法避免地面机械在行走时触碰到植物,对作物造成损伤,造成得不偿失的后果。
技术实现要素:
3.本发明的目的在于克服上述存在的问题,提供一种无人机自动除草作业方法,该自动除草作业方法可以针对不同的杂草生长状况进行自动除草,减少了机器对作物的损害和作业时间,提高除草效果。
4.本发明的目的通过以下技术方案实现:
5.一种无人机自动除草作业方法,包括以下步骤:
6.(1)采集待除草区域的信息,获取待除草区域的边界,其中,所述区域的信息包括农田边框的各顶点坐标、农田长度与农田宽度;
7.(2)根据农田的边框建立直角坐标系,自动生成多个杂草检测检测点;根据除草区域的地图边界和大小,结合机载传感器的检测范围和无人机的飞行高度,生成多个检测点,使无人机在各个检测点上都检测一次,获得整个区域的杂草信息;
8.(3)无人机飞至检测点,利用安装在无人机下方的传感器获取下方的杂草信息;通过算法识别数据中的杂草,获取杂草的生长状况,并计算出每一处杂草相对于无人机的位置和杂草的生长状况信息;
9.(4)基于该点无人机rtk定位信息和杂草相对于无人机的位置,计算出杂草在农田中的位置,并记录杂草的位置;
10.(5)无人机遍历剩下的检测点,重复步骤(3)和(4),遍历所有检测点,记录整个计划除草区域内的所有杂草信息;
11.(6)根据杂草的位置和生长状况,生成无人机除草顺序,规划无人机的飞行航线;
12.(7)除草无人机根据已规划的航线依次飞到杂草生长处进行除草。
13.本发明的一个优选方案,在步骤(2)中,生成检测点的算法包括以下步骤:
14.设农田长度m,农田宽度n;设传感器探测一次能采集到的信息的区域长度为a,宽度为b;设c为小于m/a的最大整数,d为小于n/b的最大整数,则检测点的坐标为:
15.p(a/2+ai,b/2+bj)i=(0,1,2,3
……
,c),j=(0,1,2
……
,d);
16.检测点的数量为:(c+1)*(d+1);
17.设检测点在农田中的坐标为(x,y),则对于第k个检测点,其坐标为:
18.y=[(k
‑
1)/(c+1)]*b+b/2;
[0019]
当[(k
‑
1)/(c+1)]mod 2=0时,x={(k
‑
1)mod(c+1)+1/2}*a;
[0020]
当[(k
‑
1)/(c+1)]mod 2=1时,x={c
‑
(k
‑
1)mod(c+1)+1/2}*a。
[0021]
本发明的一个优选方案,在步骤(2)中,所述机载传感器包括超声波、激光雷达、结构光、毫米波雷达、单目摄像头、双目摄像头。
[0022]
本发明的一个优选方案,在步骤(3)中,获取杂草信息的算法包括以下步骤:
[0023]
使用深度学习算法,综合各个传感器的数据,识别数据中的杂草的位置信息,包括杂草相对于人机的机体坐标系的三维位置信息;
[0024]
使用深度学习算法,综合各个传感器的数据,识别杂草的大小、数量、品种,对每一处杂草的生长状况进行分级,最严重为十级,最轻微为一级。
[0025]
本发明的一个优选方案,在步骤(4)中,记录杂草位置的算法包括以下步骤:
[0026]
依据农田坐标系原点的全球定位数据和依据无人机rtk定位数据,计算出无人机相对于农田坐标系的位置;
[0027]
根据无人机在农田坐标系中的位置和无人机的姿态数据,结合杂草相对于无人机的位置,计算出杂草生长处在农田坐标系中的位置并记录在记载计算机中。
[0028]
本发明的一个优选方案,在步骤(6)中,规划除草的飞行航线的算法包括以下步骤:
[0029]
根据杂草的生长位置和杂草状况的级别,计算出杂草质量、除草所需的时间和能量;
[0030]
按照用时最少和能量最小的原则,计算出最优的除草顺序,自动生成无人机的除草路径。
[0031]
本发明的一个优选方案,在步骤(7)中,无人机的除草工作包括以下步骤:
[0032]
(1)根据获得的除草飞行航线,无人机飞到第一个除草点的正上方;
[0033]
(2)无人机放下脚架,同时垂直下降,降落在除草点上;
[0034]
(3)螺旋桨停转,无人机依靠脚架支撑,除草机构执行除草操作,并将杂草收集到无人机上;
[0035]
(4)除草操作完成后,无人机收起脚架,垂直起飞至除草点上空悬停;
[0036]
(5)通过机载传感器检测该点杂草是否已完全清除,若杂草已清除,则飞至下一个除草点的上空,继续执行步骤(2)、(3)、(4);否则再次下降进行除草,直到该点杂草清除完毕。
[0037]
(6)待所有的除草点的杂草清除完完毕后,无人机返航。
[0038]
优选地,在除草过程中,若无人机上的杂草已满载,无人机自动飞行到已设定的杂草摆放点,卸下杂草,再飞回设定的路径中继续除草。
[0039]
优选地,在除草过程中,当遇到低电量、无人机结构损坏等无法继续作业的情况,无人机会自动返回到起飞点并向飞手发送警告信息。
[0040]
本发明与现有技术相比具有以下有益效果:
[0041]
1、本发明的无人机自动除草作业方法可以根据农田的边框信息和机载传感器的信息生成农田信息的空中探测点以及对应航线,使得无人机自动获取整块农田的杂草信息。
[0042]
2、基于高精度的无人机rtk定位数据和通过传感器探测到的杂草与无人机的相对位置,计算得出杂草在农田中的准确位置,避免机器盲目操作,便于机器进行有针对性地除草。
[0043]
3、本发明的无人机自动除草作业方法根据杂草的位置和杂草的生长状况,按照时间最少和能量最少的原则自动生成除草路径,使得无人机在除草时节省能量和时间。
[0044]
4、本发明的无人机自动除草作业方法实现了无人机的全自动除草作业,减少了农业生产过程中人工成本的投入,不仅避免了地面机械对作物造成的损害,且无人机移动灵活,还减少了在田中的位移时间,亦即减少作业时间,有效提高作业效率。
附图说明
[0045]
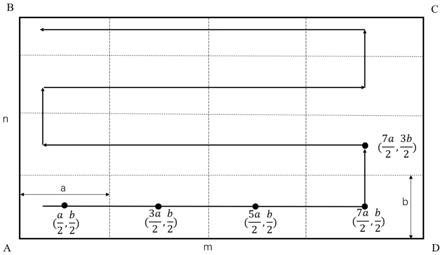
图1为本发明中的无人机自动除草作业方法的检测点与检测路径。
具体实施方式
[0046]
为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
[0047]
参见图1,本实施例中无人机自动除草作业方法,包括以下步骤:
[0048]
(1)采集待除草区域的信息,获取待除草区域的边界,其中,所述区域的信息包括农田边框的各顶点坐标、农田长度与农田宽度;
[0049]
(2)根据农田的边框建立直角坐标系,根据除草区域的地图边界和大小,结合机载传感器(超声波、激光雷达、结构光、毫米波雷达、单目摄像头、双目摄像头等)的检测范围和无人机的飞行高度,生成多个检测点,使无人机在各个检测点上都检测一次,获得整个区域的杂草信息。
[0050]
其中,生成检测点的方法为:
[0051]
设农田长度m,农田宽度n;设传感器探测一次能采集到的信息的区域长度为a,宽度为b;设c为小于m/a的最大整数,d为小于n/b的最大整数,则检测点的坐标为:
[0052]
p(a/2+ai,b/2+bj) i=(0,1,2,3......,c),j=(0,1,2......,d);
[0053]
检测点的数量为:(c+1)*(d+1);
[0054]
设检测点在农田中的坐标为(x,y),则对于第k个检测点,其坐标为:
[0055]
y=[(k
‑
1)/(c+1)]*b+b/2;
[0056]
当[(k
‑
1)/(c+1)]mod 2=0时,x={(k
‑
1)mod(c+1)+1/2}*a;
[0057]
当[(k
‑
1)/(c+1)]mod 2=1时,x={c
‑
(k
‑
1)mod(c+1)+1/2}*a。
[0058]
(3)无人机飞至检测点,利用安装在无人机下方的传感器获取下方的杂草信息(可采用图像识别技术);通过算法识别数据中的杂草,获取杂草的生长状况,并计算出每一处杂草相对于无人机的位置和杂草的生长状况信息。
[0059]
其中,获取杂草信息的方法为:
[0060]
使用深度学习算法,综合各个传感器的数据,识别数据中的杂草的位置信息,包括杂草相对于人机的机体坐标系的三维位置信息;
[0061]
使用深度学习算法,综合各个传感器的数据,识别杂草的大小、数量、品种,对每一处杂草的生长状况进行分级,最严重为十级,最轻微为一级。
[0062]
(4)基于该点无人机rtk定位信息和杂草相对于无人机的位置,计算出杂草在农田中的位置,并记录杂草的位置。
[0063]
其中,记录杂草位置的方法为:
[0064]
先依据农田坐标系原点的全球定位数据和依据无人机rtk定位数据,计算出无人机相对于农田坐标系的位置;再根据无人机在农田坐标系中的位置和无人机的姿态数据,结合杂草相对于无人机的位置,计算出杂草生长处在农田坐标系中的位置并记录在记载计算机中。
[0065]
(5)无人机遍历剩下的检测点,重复步骤(3)和(4),遍历所有检测点,记录整个计划除草区域内的所有杂草信息;
[0066]
(6)根据杂草的位置和生长状况,生成无人机除草顺序,规划无人机的飞行航线:根据杂草的生长位置和杂草状况的级别,计算出杂草质量、除草所需的时间和能量;按照用时最少和能量最小的原则,计算出最优的除草顺序,自动生成无人机的除草路径。
[0067]
(7)除草无人机根据已规划的航线依次飞到杂草生长处进行除草,具体地,无人机的除草工作为:
[0068]
根据获得的除草飞行航线,无人机飞到第一个除草点(除草点是通过步骤(3)和步骤(4)获得的杂草生长点)的正上方;无人机放下脚架,同时垂直下降,降落在除草点上;螺旋桨停转,无人机依靠脚架支撑,除草机构执行除草操作,并将杂草收集到无人机上;除草操作完成后,无人机收起脚架,垂直起飞至除草点上空悬停;通过机载传感器检测该点杂草是否已完全清除,若杂草已清除,则飞至下一个除草点的上空,继续执行上述除草操作;否则再次下降进行除草,直到该点杂草清除完毕。
[0069]
待所有的除草点的杂草清除完完毕后,无人机返航。
[0070]
进一步,在除草过程中,若无人机上的杂草已满载,无人机自动飞行到已设定的杂草摆放点,卸下杂草,再飞回设定的路径中继续除草。
[0071]
进一步,在除草过程中,当遇到低电量、无人机结构损坏等无法继续作业的情况,无人机会自动返回到起飞点并向飞手发送警告信息。
[0072]
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1