终端、控制系统、控制方法以及程序与流程
1.本公开涉及一种终端、控制系统、控制方法以及程序。
背景技术:
2.例如,已知设定叉车等移动体的移动路径的技术。在专利文献1中,已知如下的方法:以预先设定的广域轨道移动至目标物附近,通过设于叉车的测域传感器来检测目标物的位置信息,确定到达目标物的接近轨道。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2017
‑
182502号公报
技术实现要素:
6.发明所要解决的问题
7.但是,根据仓库内的状况、货物的配送者的希望等,有时期望与专利文献1那样预先设定或自动生成的对象物的输送路径不同的输送路径。此外,例如在卸下搭载于车辆的对象物的情况下,有时难以掌握对象物如何搭载于车辆,因此也难以预先设定输送路径。此外,除了输送路径以外,例如关于输送对象物的顺序等移动体所执行的各种作业内容,有时期望与预先设定或自动确定的作业内容不同、预先设定本身存在困难。
8.因此,要求适当地设定移动体进行的作业内容。
9.本公开的至少一个实施方式是为了解决上述的问题而完成的,其目的在于,提供一种能适当地设定移动体进行的作业内容的终端、控制系统、控制方法以及程序。
10.技术方案
11.为了解决上述的问题,达成目的,本公开的终端包括:第一获取部,获取由用户输入的、表示移动体的作业内容的指定作业信息;输出部,将所述指定作业信息输出至外部的装置;第二获取部,从外部的装置获取基于所述指定作业信息而生成的、表示所述移动体的作业内容的设定作业信息;以及显示控制部,使所述设定作业信息显示于显示部。
12.为了解决上述的问题,达成目的,本公开的控制系统包括:所述终端和基于所述设定作业信息来执行作业的所述移动体。
13.为了解决上述的问题,达成目的,本公开的控制方法包括:获取由用户输入的、表示移动体的作业内容的指定作业信息的步骤;将所述指定作业信息输出至外部的装置的步骤;从外部的装置获取基于所述指定作业信息而生成的、表示所述移动体的作业内容的设定作业信息的步骤;以及使所述设定作业信息显示于显示部的步骤。
14.为了解决上述的问题,达成目的,本公开的程序使计算机执行包括以下步骤的控制方法:获取由用户输入的、表示移动体的作业内容的指定作业信息的步骤;将所述指定作业信息输出至外部的装置的步骤;从外部的装置获取基于所述指定作业信息而生成的、表示所述移动体的作业内容的设定作业信息的步骤;以及使所述设定作业信息显示于显示部
的步骤。
15.发明效果
16.根据本公开,能适当地设定移动体进行的作业内容。
附图说明
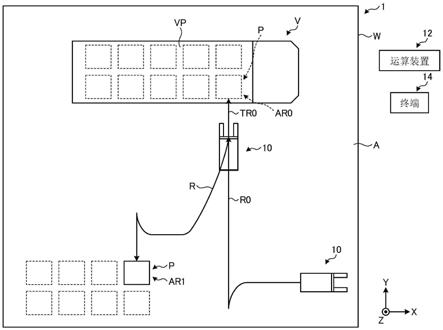
17.图1是本公开的至少一个实施方式的控制系统的示意图。
18.图2是移动体的构成的示意图。
19.图3是运算装置的示意性的框图。
20.图4是移动体的控制装置的示意性的框图。
21.图5是本公开的至少一个实施方式的终端的示意性的框图。
22.图6是表示显示于显示部的提案输送路径的例子的示意图。
23.图7是表示显示于显示部的提案输送路径的例子的示意图。
24.图8是表示显示部所显示的设定输送路径的例子的示意图。
25.图9是说明由移动体进行的作业开始之前的处理流程的流程图。
26.图10是表示显示于显示部的指定输送路径的例子的示意图。
27.图11是说明在作业中对设定输送路径进行设定时的处理流程的流程图。
28.图12是表示指定输送对象物的顺序(输送顺序)的情况下的图像的图。
29.图13是表示指定输送对象物的顺序(输送顺序)的情况下的图像的图。
30.图14是表示指定对象物的输送方法的情况下的图像的图。
31.图15是表示指定对象物的输送目的地的情况下的图像的图。
32.图16是本公开的至少一个实施方式的控制系统的示意图。
33.图17是表示显示于显示部的提案输送路径的例子的示意图。
34.图18是表示显示于显示部的提案输送路径的例子的示意图。
35.图19是表示显示于显示部的设定输送路径的例子的示意图。
具体实施方式
36.以下,参照附图对本发明的优选的实施方式进行详细说明。需要说明的是,本发明并不受该实施方式限定,此外,在具有多个实施方式的情况下,还包括组合各实施方式而构成的实施方式。
37.(第一实施方式)
38.(控制系统的整体构成)
39.图1是本公开的至少一个实施方式的控制系统的示意图。如图1所示,第一实施方式的控制系统1包括:移动体10、运算装置12以及终端14。控制系统1是对属于设备w的移动体10的移动进行控制的系统。设备w例如是仓库等进行物流管理的设备。移动体10是能自动移动的装置。在本实施方式中,移动体10是叉车,进一步说,是所谓的agf(automated guided forklift:自动导向叉车)、agv(automated guided vehicle:自动导向车辆)。不过,移动体10不限于自动移动的装置,例如,也可以为操作者所操作的有人的移动体(有人叉车等)。如图1所示,在本实施方式的例子中,移动体10拾取(pick up)配置于车辆v的货台vp的设置区域ar0的对象物p,并输送至设备w内的输送目的地区域ar1,在输送目的地区域
ar1配置对象物p。车辆v是将对象物p配送至设备w的车辆。车辆v例如在设备w的区域a内的指定的区域停车。对象物p是移动体10所输送的对象物,在本实施方式中为托盘,但也可以指托盘和配置于托盘上的货物。设置区域ar0是接下来要输送的对象物p所设置的区域,在本实施方式中为货台vp内的区域。设置区域ar0按每个对象物p划分,在设置区域ar0中配置有一个对象物p。不过,设置区域ar0不限于按每个对象物p划分,例如,也可以设定为设置有多个对象物p。输送目的地区域ar1是设置输送的对象物p的区域,在本实施方式中设定于设备w的区域a上。在图1的例子中,输送目的地区域ar1按每个对象物p划分,在输送目的地区域ar1中配置有一个对象物p。不过,输送目的地区域ar1不限于按每个对象物p划分,例如,也可以设定为设置有多个对象物p来作为自由空间。需要说明的是,在本实施方式中,以从车辆v的货台vp输送并卸下对象物p为例子,但不限于此,如后述的第二实施方式那样,控制系统1也可以用于将设备w内的对象物装载至货台vp时。此外,在控制系统1中,也可以包括管理设备w内的对象物p的wms(warehouse management system:仓库管理系统)。
40.在如本实施方式那样进行卸载的情况下,移动体10按照接近路径r0s向货台vp的设置区域ar0移动。移动体10接近设置区域ar0后,通过后述的传感器26来检测对象物p的位置和姿势,计算出到达设置区域ar0的接近轨道tr0。移动体10按照接近轨道tr0接近至设置于设置区域ar0的对象物p并拾取对象物p后,按照输送路径r向输送目的地区域ar1移动,在输送目的地区域ar1卸下对象物p。关于接近路径r0、接近轨道tr0以及输送路径r的详细在后文加以记述。以下,将沿区域a的一个方向设为方向x,将沿区域a的方向且与方向x正交的方向设为方向y。此外,将与区域a正交的方向,即与方向x、y正交的方向设为方向z。方向x、y为水平方向,方向z称为铅垂方向。
41.(移动体)
42.接着,对移动体10的构成进行说明。在图1中仅记载了一个移动体10,但也可以是,多个移动体10属于设备w,多个移动体10进行作业。此外,也可以是,操作者所操作的有人的移动体(有人叉车等)属于设备w。
43.图2是移动体的构成的示意图。如图2所示,移动体10具备:车身20、门架22、货叉24、传感器26以及控制装置28。车身20具备车轮20a。门架22设于车身20的前后方向上的一方的端部。门架22沿着与前后方向正交的上下方向(在此为方向z)延伸。货叉24以能在方向z上移动的方式装配于门架22。货叉24也可以能够相对于门架22在车身20的横向(与上下方向和前后方向交叉的方向)移动。货叉24具有一对爪24a、24b。爪24a、24b从门架22朝向车身20的前方向延伸。爪24a和爪24b在门架22的横向上互相分离地配置。以下,将前后方向中移动体10中设有货叉24一侧的方向设为第一方向,将未设置货叉24一侧的方向设为第二方向。
44.传感器26检测存在于车身20的周边的对象物的位置和朝向中的至少一个。也可以说,传感器26检测对象物相对于移动体10的位置和对象物相对于移动体10的朝向。在本实施方式中,传感器26设于门架22,检测车身20的第一方向侧的对象物的位置和朝向。不过,传感器26的检测方向不限于第一方向,例如也可以检测第一方向侧和第二方向侧这双方。在该情况下,作为传感器26,设置检测第一方向侧的传感器和检测第二方向侧的传感器为好。传感器26例如为照射激光的传感器。传感器26在一个方向(在此为横向)扫描并且照射激光,根据照射的激光的反射光来检测对象物的位置和朝向。需要说明的是,传感器26并不
限于以上的传感器,也可以是以任意的方法来检测对象物的传感器,例如,也可以为摄像机等。此外,传感器26设置的位置也不限于门架22。具体而言,例如,也可以将设于移动体10的安全传感器挪用为传感器26。通过挪用安全传感器,就无需新设置传感器。
45.控制装置28控制移动体10的移动。关于控制装置28将在后文叙述。
46.(运算装置)
47.图3是运算装置的示意性的框图。运算装置12是管理移动体10的装置,运算与移动体10的移动相关的信息等,向移动体10输出信息。运算装置12例如为设于设备w的所谓的地面系统,但不限于设于设备w,也可以设于远离设备w的部位。运算装置12为计算机,如图3所示,包括控制部30、存储部32以及通信部34。存储部32是存储控制部30的运算内容、程序等各种信息的存储器,例如,包括如ram(random access memory:随机读取存储器)和rom(read
‑
only memory:只读存储器)那样的主存储装置以及hdd(hard disk drive:硬盘驱动器)等外部存储装置中的至少一个。通信部34是与外部的装置进行通信的通信模块,例如为天线等。运算装置12通过无线通信与移动体10、终端14进行通信,但通信方式可以为任意。
48.控制部30为运算装置,即cpu(central processing unit:中央处理器)。控制部30包括:作业信息获取部40、移动体选定部42(选定部的一个例子)、提案作业信息获取部44、排他控制部46以及输出部48。控制部30通过从存储部32读出程序(软件)并执行来实现作业信息获取部40、移动体选定部42、提案作业信息获取部44、排他控制部46以及输出部48,执行它们的处理。需要说明的是,控制部30可以由一个cpu执行它们的处理,也可以具备多个cpu,由该多个cpu执行处理。此外,作业信息获取部40、移动体选定部42、提案作业信息获取部44、排他控制部46以及输出部48的至少一部分也可以通过硬件电路来实现。
49.移动体选定部42选定接下来进行作业的移动体10,提案作业信息获取部44获取后述的提案作业信息,排他控制部46设定禁止其他移动体的侵入的禁止路径,输出部48经由通信部34将信息输出至移动体10、终端14等外部的装置。这些处理内容的详细将在后文加以记述。
50.(移动体的控制装置)
51.图4是移动体的控制装置的示意性的框图。控制装置28控制移动体10。控制装置28为计算机,如图4所示,包括控制部50、存储部52以及通信部54。存储部52是存储控制部50的运算内容、程序等各种信息的存储器,例如,包括如ram和rom那样的主存储装置以及hdd等外部存储装置中的至少一个。通信部54是与外部的装置进行通信的通信模块,例如为天线等。控制装置28通过无线通信与运算装置12、终端14进行通信,但通信方式可以为任意。
52.控制部50为运算装置,即cpu。控制部50包括:提案作业信息获取部60(第一信息获取部的一个例子)、指定作业信息获取部61(第二信息获取部的一个例子)、设定作业信息获取部62(第三信息获取部的一个例子)、接近轨道设定部64、输出部66以及移动控制部68。控制部50通过从存储部52读出程序(软件)并执行来实现提案作业信息获取部60、指定作业信息获取部61、设定作业信息获取部62、接近轨道设定部64、输出部66以及移动控制部68,执行它们的处理。需要说明的是,控制部50可以由一个cpu执行它们的处理,也可以具备多个cpu,由该多个cpu执行处理。此外,提案作业信息获取部60、指定作业信息获取部61、设定作业信息获取部62、接近轨道设定部64、输出部66以及移动控制部68的至少一部分也可以通过硬件电路来实现。
53.提案作业信息获取部60从运算装置12获取后述的提案作业信息,指定作业信息获取部61从终端14获取后述的指定作业信息,设定作业信息获取部62获取后述的设定作业信息,接近轨道设定部64设定接近轨道tr0,输出部66经由通信部54将信息输出至运算装置12、终端14等外部的装置,移动控制部68控制移动体10的驱动部、转向等移动机构,控制移动体10的移动。这些处理内容的详细将在后文加以记述。
54.(终端)
55.终端14是用户所操作的终端。在此的用户是车辆v的驾驶者等运送搭载于车辆v的对象物p的操作者,终端14是用户所携带的便携式终端。作为终端14,可列举出所谓的智能手机、平板电脑终端以及笔记本电脑型计算机等。不过,终端14并不限于便携式终端,也可以是固定了设置场所的计算机,操作终端14的用户也不限于车辆v的驾驶者等。
56.图5是本公开的至少一个实施方式的终端的示意性的框图。终端14具备:控制部70、输入部72、显示部74、存储部76以及通信部78。输入部72是受理用户的操作的装置,例如为触摸面板、鼠标以及键盘等。显示部74是显示图像的显示装置。存储部76是存储控制部70的运算内容、程序的信息等的存储器,例如,包括如ram和rom那样的主存储装置以及hdd等外部存储装置中的至少一个。通信部78是与外部的装置进行通信的通信模块,例如为天线等。终端14通过无线通信与移动体10、运算装置12进行通信,但通信方式可以为任意。
57.控制部70为运算装置,即cpu。控制部70包括:指定作业信息获取部80(第一获取部的一个例子)、设定作业信息获取部82(第二获取部的一个例子)、提案作业信息获取部84(第三获取部的一个例子)、重新设定请求获取部86、显示控制部88以及输出部90。控制部70通过从存储部76读出程序(软件)并执行来实现指定作业信息获取部80、设定作业信息获取部82、提案作业信息获取部84、重新设定请求获取部86、显示控制部88以及输出部90,执行它们的处理。需要说明的是,控制部70可以由一个cpu执行它们的处理,也可以具备多个cpu,由该多个cpu执行处理。此外,指定作业信息获取部80、设定作业信息获取部82、提案作业信息获取部84、重新设定请求获取部86、显示控制部88以及输出部90的至少一部分也可以通过硬件电路来实现。
58.指定作业信息获取部80受理用户的输入并获取后述的指定作业信息,设定作业信息获取部82从移动体10获取后述的设定作业信息,提案作业信息获取部84从移动体10获取后述的提案作业信息,重新设定请求获取部86从移动体10获取后述的重新设定请求,显示控制部88控制图像向显示部74的显示,输出部90经由通信部78将信息输出至移动体10、运算装置12等外部的装置。这些处理内容的详细将在后文加以记述。
59.(控制系统的处理)
60.接着,对以上说明的控制系统1的处理进行说明。控制系统1通过移动体10、运算装置12以及终端14来进行信息的收发,由此设定移动体10的作业内容,执行对移动体10设定的作业内容的作业。在本实施方式中,移动体10从车辆v拾取对象物p,在输送路径r行驶,将对象物p输送至输送目的地区域ar1,在输送目的地区域ar1卸下对象物p。因此,本实施方式中的作业内容包括:从车辆v卸下的对象物p的信息(哪个对象物p成为作业对象的信息);设置对象物p的输送目的地区域ar1的信息(对象物的输送目的地的信息);以及输送路径r的信息(输送对象物p的路径的信息)。
61.(初始指定信息的获取)
62.例如当车辆v到达设备w时,由用户向终端14的输入部72输入初始指定信息。终端14的指定作业信息获取部80获取由用户输入的初始指定信息来作为指定作业信息之一。由用户输入指定输送的对象物p的信息和指定对象物p的输送目的地的信息来作为初始指定信息。在指定输送的对象物p的信息中,例如包括按每个设置区域ar0表示搭载于车辆v的对象物p的信息(例如对象物p的id)和在车辆v的设置区域ar0中设置有哪个对象物p的信息。即,可以说,由用户按每个设置区域ar0输入设置的对象物p的信息来作为指定要输送的对象物的信息。指定对象物p的输送目的地的信息是指定对象物p的输送目的地区域ar1的信息,按每个对象物p来指定。即,由用户按每个输送的对象物p指定输送目的地区域ar1。需要说明的是,可以在初始指定信息中输入与对象物p的姿势(朝向)相关的信息。
63.(移动体的选定)
64.终端14的输出部90将指定作业信息获取部80所获取到的初始指定信息输出至运算装置12。运算装置12的作业信息获取部40从终端14获取初始指定信息。运算装置12的移动体选定部42基于初始指定信息,选定执行作业的移动体10。移动体选定部42例如从属于设备w的多个移动体中选定执行作业的移动体10。移动体选定部42可以通过任意的方法来选定移动体10,但是,例如,也可以基于成为作业对象的对象物p的位置、输送目的地区域ar1的位置等,选定适于输送对象物p的移动体来作为执行作业的移动体10。需要说明的是,运算装置12也可以预先选定执行作业的移动体10。在该情况下,例如,终端14的输出部90也可以将初始指定信息输出至选定的移动体10。
65.(接近路径的获取)
66.运算装置12的提案作业信息获取部44获取接近路径r0(参照图1)的信息。接近路径r0是到达设置区域ar0(对象物p)的路径。接近路径r0例如预先设定于设置区域ar0,提案作业信息获取部44获取针对在初始指定信息中指定的设置区域ar0设定的接近路径r0的信息(坐标信息)。例如,提案作业信息获取部44通过从存储部32读出接近路径r0来获取接近路径r0。
67.接近路径r0基于设备w的地图信息预先设定。设备w的地图信息是包括设置于设备w的障碍物(柱等)、移动体10可行驶的通道等位置信息在内的信息,可以说是表示在区域a内移动体10可移动的区域的信息。此外,接近路径r0除了基于设备w的地图信息来设定以外,还基于移动体10的车辆规格的信息来设定为好。车辆规格的信息例如为移动体10的大小、最小转弯半径等,影响移动体10可移动的路径的规格。在也基于车辆规格的信息设定接近路径r0的情况下,接近路径r0按每个移动体设定为好。需要说明的是,接近路径r0可以由人基于地图信息、车辆规格的信息等设定,也可以由运算装置12等装置基于地图信息、车辆规格的信息等自动地设定。在自动地设定接近路径r0的情况下,例如也可以指定想要经过的点(waypoint),在该情况下,能设定经过想要经过的点,并且最短且避开障碍物(墙壁等固定物)的接近路径r0。需要说明的是,接近路径r0不限于按每个设置区域ar0设定,例如,也可以按每个车辆v的停止位置设定。在该情况下,例如,初始指定信息中包括车辆v的停止位置的信息,提案作业信息获取部44获取针对在初始指定信息中指定的车辆v的停止位置设定的接近路径r0的位置信息。
68.(提案输送路径的获取)
69.运算装置12的提案作业信息获取部44获取作为提案作业信息的提案输送路径r1
的信息。提案输送路径r1是向用户提出的输送路径r,可以说是成为实际的输送路径r的候选的路径。提案输送路径r1是从设置有对象物p的设置区域ar0至输送目的地区域ar1的路径。提案输送路径r1按每个设置区域ar0和输送目的地区域ar1预先设定。提案作业信息获取部44获取预先设定为从在初始指定信息中指定的设置区域ar0至输送目的地区域ar1的路径的提案输送路径r1。例如,提案作业信息获取部44通过从存储部32读出提案输送路径r1来获取提案输送路径r1。提案作业信息获取部44针对在初始指定信息中被指定为要输送的对象物p的每一个获取提案输送路径r1。需要说明的是,提案输送路径r1可以与接近路径r0同样地,基于设备w的地图信息、车辆规格的信息设定。
70.运算装置12的输出部48将获取到的提案输送路径r1的信息(提案作业信息的一个例子)输出至选定的移动体10。移动体10的提案作业信息获取部60从运算装置12获取包含该提案输送路径r1的信息的提案作业信息。移动体10通过输出部66将获取到的提案输送路径r1的信息输出至终端14。终端14的提案作业信息获取部84从移动体10获取提案输送路径r1的信息。终端14的显示控制部88使提案作业信息获取部84所获取到的提案输送路径r1显示于显示部74。需要说明的是,运算装置12也可以不经由移动体10,将提案输送路径r1直接输出至终端14。
71.图6是表示显示部所显示的提案输送路径的例子的示意图。如图6所示,显示控制部88使如下图像显示于显示部74的画面d:车辆v的图像、车辆v内的设置区域ar0的图像、对象物p的图像、输送目的地区域ar1的图像以及提案输送路径r1的图像。在图6的例子中,作为初始指定信息,指定了如下意思:在设置区域ar0a中设置有对象物pa,在设置区域ar0b中设置有对象物pb,在设置区域ar0c中设置有对象物pc,在设置区域ar0d中设置有对象物pd,在设置区域ar0e中设置有对象物pe。在图6的例子中,作为初始指定信息,指定了如下意思:对象物pa的输送目的地为输送目的地区域ar1a,对象物pb的输送目的地为输送目的地区域ar1b,对象物pc的输送目的地为输送目的地区域ar1c,对象物pd的输送目的地为输送目的地区域ar1d,对象物pe的输送目的地为输送目的地区域ar1e。在图6的例子中,使如下路径显示于画面d:针对对象物pa的提案输送路径r1a、针对对象物pb的提案输送路径r1b、针对对象物pc的提案输送路径r1c、针对对象物pd的提案输送路径r1d以及针对对象物pe的提案输送路径r1e。显示控制部88以显示于画面d的车辆v、设置区域ar0、输送目的地区域ar1以及提案输送路径r1的位置关系与设备w内的实际的车辆v、设置区域ar0、输送目的地区域ar1以及提案输送路径r1的位置关系对应的方式显示各自的图像,但也可以不严格地与实际的位置关系一致。
72.需要说明的是,在本实施方式中,运算装置12生成提案输送路径r1(提案作业信息),但不限于此,例如也可以是移动体10具备提案作业信息获取部44,移动体10生成提案输送路径r1(提案作业信息)。在该情况下,终端14向移动体10输出初始指定信息(指定作业信息),移动体10基于初始指定信息生成提案输送路径r1(提案作业信息)。
73.(指定输送路径的获取)
74.图7是表示显示于显示部的提案输送路径的例子的示意图。终端14在获取到提案输送路径r1并将其显示于画面d后,通过指定作业信息获取部80来获取作为指定作业信息的指定输送路径r2的信息。指定输送路径r2是由用户指定的输送路径r。指定输送路径r2是由用户指定的、从设置有对象物p的设置区域ar0至输送目的地区域ar1的路径。如图7所示,
终端14在使提案输送路径r1显示于画面d的状态下,受理指定输送路径r2的输入。在由用户确认了终端14所显示的提案输送路径r1而想要指定除了提案输送路径r1以外的路径的情况下,由用户向终端14的输入部72输入指定输送路径r2的信息。例如,由用户在画面d上选择想要变更的提案输送路径r1、对象物p,在画面d上输入从设置区域ar0至输送目的地区域ar1的大致的轨迹。终端14获取该轨迹来作为指定输送路径r2。不过,指定输送路径r2的输入方法可以为任意。
75.在图7的例子中,对象物pa的提案输送路径r1a不被用户接受,而输入了对象物pa的指定输送路径r2a。显示控制部88在显示有提案输送路径r1的画面d中显示指定输送路径r2a的图像。需要说明的是,在图7的例子中,关于提案输送路径r1b、r1c、r1d、r1e,被用户接受而未输入指定输送路径r2。
76.终端14的输出部90将指定作业信息获取部80所获取到的指定输送路径r2的信息(指定作业信息)输出至移动体10。移动体10的指定作业信息获取部61从终端14获取指定输送路径r2的信息(指定作业信息)。
77.(设定输送路径的获取)
78.移动体10的设定作业信息获取部62基于指定输送路径r2的信息(指定作业信息),获取作为设定作业信息的设定输送路径r3的信息。设定输送路径r3是基于指定输送路径r2生成的输送路径r。设定输送路径r3是从设置有对象物p的设置区域ar0至输送目的地区域ar1的路径。在本实施方式中,移动体10的设定作业信息获取部62基于指定输送路径r2(指定作业信息)对设定输送路径r3(设定作业信息)进行设定。
79.设定作业信息获取部62与接近路径r0的设定方法同样地,基于设备w的地图信息、车辆规格的信息对设定输送路径r3进行设定。设定作业信息获取部62基于设备w的地图信息、车辆规格的信息,以成为与指定输送路径r2接近的路径的方式对设定输送路径r3进行设定。在输入了作为初始指定信息的对象物p的朝向(姿势)的信息的情况下,优选的是,设定作业信息获取部62也考虑对象物p的朝向,即基于对象物p的朝向来对设定输送路径r3进行设定。
80.在本实施方式中,设定作业信息获取部62通过模型预测控制(model predictive control:mpc)对设定输送路径r3进行设定。以下,对设定输送路径r3的计算方法的例子进行说明。需要说明的是,以下的计算方法为一个例子,因此也可以通过其他方法来计算出设定输送路径r3。
81.移动体10的控制输入u(k)由以下的式(1)表示。
82.[数式1]
[0083]
u(k)=[v(k),φ(k)]
t
…
(1)
[0084]
在此,v(k)是移动体10的速度指令值,是移动体10的横摆角速度指令值,k表示离散时间的索引。每离散时间的移动体10的控制输入u(k)由以下的式(2)表示。需要说明的是,n为预测区间(predictive horizon)。
[0085]
[数式2]
[0086]
u(k)=[u(k),u(k+1),
…
,u(k+n
‑
1)]
t
…
(2)
[0087]
设定作业信息获取部62对以下的式(3)所示的最优化问题进行求解,求出作为控制输入的最优解的u(k)、u(k+1)、
……
、u(k+n
‑
1),计算出设定输送路径r3。作为该最优化问
题的解法,可以使用序列二次规划法(sequential quadratic programming)、内点法等公知技术。
[0088]
[数式3]
[0089]
j(u(k))
→
min
…
(3)
[0090]
需要说明的是,在像这样计算出设定输送路径r3时,例如,赋予以下的式(4)至式(8)所示的约束条件。
[0091]
[数式4]
[0092]
x(k)=v(k)cosθ(k)
…
(4)
[0093]
[数式5]
[0094]
y(k)=v(k)sinθ(k)
…
(5)
[0095]
[数式6]
[0096][0097]
[数式7]
[0098]
v(k)≤v
max
…
(7)
[0099]
[数式8]
[0100]
‑
φ
max
≤φ(k)≤φ
max
…
(8)
[0101]
在此,x为方向x上的移动体10的坐标,y为方向y上的移动体10的坐标,θ为移动体10相对于基准轴的倾斜角度,l为表示移动体10的前轮与后轮的距离的轴距(wheelbase)。vmax、为预先设定的速度和横摆角速度的上限值。
[0102]
需要说明的是,有时存在多个能从设置区域ar0到达至输送目的地区域ar1的路径。在该情况下,设定作业信息获取部62计算出从设置区域ar0至输送目的地区域ar1的多个路径,即计算出多个成为输送路径的候选的路径,例如,将这些路径中与指定输送路径r2最接近的路径设定为设定输送路径r3。
[0103]
需要说明的是,设定作业信息获取部62针对指定输送路径r2未被指定的对象物p,即针对由提案输送路径r1被用户接受了的对象物p,将提案输送路径r1直接设为设定输送路径r3。换言之,设定作业信息获取部62在指定输送路径r2未被用户指定的情况下,将预先设定的提案输送路径r1设定为设定输送路径r3。不过,设定作业信息获取部62针对指定输送路径r2未被指定的对象物p,也可以基于提案输送路径r1,通过与上述同样的方法对设定输送路径r3进行设定。
[0104]
图8是表示显示于显示部的设定输送路径的例子的示意图。当移动体10像这样对设定输送路径r3进行设定时,通过输出部66将设定输送路径r3的信息(设定作业信息)输出至终端14。终端14的设定作业信息获取部82从移动体10获取设定输送路径r3的信息(设定作业信息)。如图8所示,终端14的显示控制部88使设定作业信息获取部82所获取到的设定输送路径r3(设定作业信息)的图像显示于显示部74的画面d。在图8的例子中,显示出基于对象物pa的指定输送路径r2a而设定的设定输送路径r3a。此外,在图8的例子中,对于对象物pb、pc、pd、pe而言,指定输送路径r2未被指定,因此将提案输送路径r1b、r1c、r1d、r1e直接设定为设定输送路径r3b、r3c、r3d、r3e。
[0105]
终端14获取用户是否许可设定输送路径r3的信息。例如,由用户向终端14的输入
部72输入许可设定输送路径r3的意思的信息(许可信息),由此,终端14获取用户许可了设定输送路径r3的意思的许可信息。需要说明的是,在未由用户许可设定输送路径r3的情况下,例如,输入再次指定输送路径r2。在该情况下,通过移动体10,基于新输入的指定输送路径r2对设定输送路径r3进行更新设定,显示于终端14。即,移动体10在用户未许可设定输送路径r3的情况下,基于用户新指定的指定输送路径r2,对设定输送路径r3进行更新设定。
[0106]
终端14的输出部90将许可信息输出至移动体10。移动体10的设定作业信息获取部62从终端14获取许可信息,通过输出部66将许可的设定输送路径r3输出至运算装置12。运算装置12的排他控制部46从移动体10获取许可的设定输送路径r3。需要说明的是,终端14也可以不经由移动体10,将许可的设定输送路径r3直接输出至运算装置12。
[0107]
此外,在本实施方式中,移动体10生成设定输送路径r3(设定作业信息),但不限于此,例如也可以是运算装置12具备设定作业信息获取部62,运算装置12生成设定输送路径r3(设定作业信息)。在该情况下,终端14经由移动体10或直接向运算装置12输出指定输送路径r2(指定作业信息),运算装置12基于指定输送路径r2(指定作业信息)生成设定输送路径r3(设定作业信息)。运算装置12经由移动体10或直接向终端14输出生成的设定输送路径r3(设定作业信息)。
[0108]
(禁止路径的设定)
[0109]
运算装置12的排他控制部46确认设定输送路径r3是否被设定为禁止路径。禁止路径是指,在移动体10行驶时禁止其他移动体10侵入的路径(区域)。在某个移动体10行驶时,其他移动体10在该移动体10的路径的附近行驶的情况下,移动体彼此恐怕会碰撞。为了防止这样的碰撞,在移动体10行驶的情况下,设定禁止路径。需要说明的是,禁止路径的设定方法是任意的,例如将与移动体10预定行驶的路径接近的路径(区域)设定为禁止路径。需要说明的是,与移动体10预定行驶的路径接近的路径(区域)例如是指,相对于移动体10预定行驶的路径位于规定的距离范围内的路径(区域)。
[0110]
排他控制部46确认设定输送路径r3的至少一部分是否设定为其他移动体10行驶时的禁止路径,在未设定为禁止路径的情况下,登记设定输送路径r3,确定使移动体10在设定输送路径r3上行驶的意思。在排他控制部46将设定输送路径r3的至少一部分设定为其他移动体10行驶时的禁止路径的情况下,优选的是,在禁止路径的设定解除之前,不使移动体10开始行驶。
[0111]
在排他控制部46确定了使移动体10在设定输送路径r3上行驶的情况下,设定与设定输送路径r3对应的禁止路径。与设定输送路径r3对应的禁止路径是禁止其他移动体10(除了在设定输送路径r3上行驶的移动体10以外的移动体)的侵入的路径(区域)。需要说明的是,排他控制部46针对接近路径r0也同样地,确认接近路径r0是否设定为其他移动体10行驶时的禁止路径,在未设定为禁止路径的情况下,设定与接近路径r0对应的禁止路径。
[0112]
在设定了与设定输送路径r3对应的禁止路径后,运算装置12的输出部48向移动体10输出使作业开始的意思的指令。当移动体10从运算装置12获取到使作业开始的意思的指令,开始作业。关于作业的内容将在后文加以记述。
[0113]
(作业开始之前的处理流程)
[0114]
对由以上说明的移动体10进行的作业开始之前的处理流程进行说明。图9是说明由移动体进行的作业开始之前的处理流程的流程图。如图9所示,终端14获取由用户输入的
初始指定信息,即指定输送的对象物p信息和指定对象物p的输送目的地的信息,并将其输出至运算装置12(步骤s10)。运算装置12基于初始指定信息,获取提案输送路径r1的信息,并将其输出至移动体10(步骤s12)。移动体10从运算装置12获取提案输送路径r1的信息,并将其输出至终端14(步骤s14)。
[0115]
终端14将获取到的提案输送路径r1显示于显示部74(步骤s16)。由用户确认显示于显示部74的提案输送路径r1,向终端14输入指定输送路径r2。终端14获取由用户输入的指定输送路径r2的信息,使其显示于显示部74并输出至移动体10(步骤s18)。移动体10基于获取的指定输送路径r2对设定输送路径r3进行设定,并将其输出至终端14(步骤s20)。需要说明的是,如上所述,设定输送路径r3也可以通过运算装置12来生成。终端14使获取到的设定输送路径r3显示于显示部74(步骤s22),等待用户的许可。在设定输送路径r3未被许可的情况下(步骤s24;no),由用户对指定输送路径r2进行新指定,因此返回步骤s18的处理。另一方面,终端14在设定输送路径r3已被用户许可的情况下(步骤s24;yes),即获取到许可信息的情况下,向移动体10输出许可信息(步骤s26)。
[0116]
移动体10在获取到许可信息后,向运算装置12输出许可的设定输送路径r3的信息(步骤s28)。运算装置12在获取到许可的设定输送路径r3的信息后,登记设定输送路径r3(步骤s30),即确定使移动体10在设定输送路径r3上输送,设定与设定输送路径r3对应的禁止路径(步骤s32)。运算装置12向移动体10输入开始作业的意思的指令,移动体10开始作业(步骤s34)。
[0117]
像这样,在以上的说明中,首先通过运算装置12来生成提案输送路径r1(提案作业信息),在提案输送路径r1(提案作业信息)被用户确认后,输入指定输送路径r2(指定作业信息),但不限于此。例如,也可以不生成提案输送路径r1(提案作业信息),由用户将指定输送路径r2(指定作业信息)与初始指定信息一起输入至终端14。
[0118]
此外,也可以是,控制系统1,换言之移动体10能切换第一模式和第二模式,第一模式是基于如上所述的从用户输入的指定输送路径r2(指定作业信息)来生成设定输送路径r3(设定作业信息)的模式,第二模式是与指定输送路径r2(指定作业信息)无关地自动生成设定输送路径r3(设定作业信息)的模式。在第二模式中,例如为如下模式:在由用户输入了初始指定信息后,不对指定输送路径r2进行指定而生成设定输送路径r3。即,在第二模式中,例如基于提案输送路径r1来生成设定输送路径r3。第一模式与第二模式例如通过由用户向终端14输入来切换。即,终端14显示设为第一模式或设为第二模式的图像,获取由用户进行的设为第一模式或设为第二模式的选择,确定设为第一模式或设为第二模式。例如,在用户想要管理作业内容的情况下设为第一模式,在想要降低用户的管理负担的情况下设为第二模式,由此,能进行与用户的意图相应的灵活的处理。
[0119]
(移动体的作业)
[0120]
(按照接近路径的行驶、对象物的位置/姿势信息的检测)
[0121]
如图1所示,移动体10在获取到开始作业的意思的指令后,根据移动控制部68的控制,按照接近路径r0向设置区域ar0行驶。移动体10在接近路径r0的行驶中持续利用传感器26进行检测,通过传感器26来持续检测对象物p的位置/姿势信息的处理。传感器26在移动体10到达能通过传感器26检测对象物p的位置/姿势信息的距离后,检测对象物p的位置/姿势信息。
[0122]
对象物p的位置/姿势信息是表示对象物p的位置(坐标)和对象物p的姿势(朝向)的信息。例如,在传感器26为照射激光的构成的情况下,移动体10在接近路径r0的行驶中,由传感器26在横向(水平方向)扫描并且照射激光。移动体10在接近对象物p后,位于传感器26的前方向的对象物p反射激光。传感器26接收来自对象物p的反射光。移动体10基于传感器26所接收的来自对象物p的反射光,检测对象物p的位置和朝向。移动体10可以根据来自对象物p的反射光朝向传感器26的方向、从照射激光起直至接收到反射光的时间等,计算出对象物p的位置和姿势。
[0123]
(按照接近轨道的行驶)
[0124]
移动体10的接近轨道设定部64基于对象物p的位置/姿势信息,计算出作为到达相对于对象物p成为规定的位置和姿势的目标位置/姿势的路径的接近轨道tr0。目标位置/姿势例如为能拾取对象物p的(例如可以通过直行将货叉24插入至对象物p的托盘的开口)位置和姿势。接近轨道设定部64基于对象物p的位置/姿势信息来计算出目标位置/姿势,计算出到达目标位置/姿势的路径来作为接近轨道tr0。接近轨道tr0的计算方法与上述的设定输送路径r3的计算方法相同。
[0125]
移动体10在计算出接近轨道tr0后,将行驶的路径从接近路径r0切换为接近轨道tr0,按照接近轨道tr0行驶,到达目标位置/姿势,拾取设置于设置位置ar0的对象物p。
[0126]
(按照设定输送路径的行驶)
[0127]
在拾取了对象物p后,移动体10按照设定输送路径r3行驶,将对象物p输送至输送目的地区域ar1,在输送目的地区域ar1设置对象物p(卸下)。
[0128]
在输送目的地区域ar1卸下对象物p后,移动体10判断是否存在其他要输送的对象物p。在无其他要输送的对象物的情况下,结束作业。在存在其他要输送的对象物p的情况下,移动体10按照针对该对象物p(设置区域ar0)设定的接近路径r0行驶,继续与上述同样的处理。
[0129]
需要说明的是,例如在接近路径r0未按每个设置区域ar0进行设定的情况下,移动体10按照为了拾取紧前输送过的对象物p而使用的接近路径r0,移动至下一对象物p的附近。下一个对象物p位于紧前的对象物p附近,因此,即使使用紧前输送过的对象物p的接近路径r0,也能检测下一对象物p的位置信息/姿势,生成到达下一对象物p的接近轨道tr0。
[0130]
(作业中途的设定输送路径的设定)
[0131]
在以上的说明中,移动体10在开始作业前对指定输送路径r2进行指定并对设定输送路径r3进行了设定,但也可以在移动体10的作业中,即在输送中对指定输送路径r2进行指定并对设定输送路径r3进行设定。以下,具体地进行说明。
[0132]
移动体10在按照接近路径r0、设定输送路径r3的行驶中,通过传感器26、其他传感器来检测障碍物。障碍物是指,在移动体10维持原本的状态持续行驶的情况下,恐怕会发生碰撞的物体。移动体10在检测到障碍物后,判断为无法继续在该状态下行驶而停止行驶。移动体10在检测到障碍物而判断为无法继续在该状态下行驶后,通过输出部66向终端14输出重新设定请求。重新设定请求是向终端14请求对指定输送路径r2进行再次指定的信息。
[0133]
图10是表示显示于显示部的指定输送路径的例子的示意图。终端14的重新设定请求获取部86从移动体10获取重新设定请求。终端14将获取到重新设定请求的意思例如通过声音、向显示部74的显示等进行通知。此外,终端14在获取到重新设定请求后,将受理指定
输送路径r2的输入的图像显示于显示部74。由用户例如通过目视来确认障碍物,向终端14输入能避开障碍物的、新的指定输送路径r2。终端14在获取到新的指定输送路径r2后,将新的指定输送路径r2显示于显示部74。在图10的例子中,在接受指定输送路径r2的输入的图像中,除了车辆v、设置区域ar0以及输送目的地区域ar1等图像以外,还包括移动体10的图像。例如,移动体10的图像显示于反映了移动体10实际停止的位置的位置。由用户输入从移动体10所停止的位置起直至输送目的地区域ar1为止的、新的指定输送路径r2,终端14获取该新的指定输送路径r2的信息。
[0134]
终端14向移动体10输出新的指定输送路径r2的信息。移动体10以与上述说明的方法同样的方法,基于新的指定输送路径r2来新生成设定输送路径r3,并将其输出至终端14。终端14将新生成的设定输送路径r3显示于显示部74,在获取到用户的许可的情况下,向移动体10输出关于新生成的设定输送路径r3的许可信息。移动体10与上述的说明同样地,在向运算装置12输出许可的设定输送路径r3,从运算装置12接受到作业开始的指令后,开始新生成的设定输送路径r3上的行驶。
[0135]
图11是说明在作业中对设定输送路径进行设定时的处理流程的流程图。如图11所示,移动体10在设定输送路径r3上行驶,并且判断是否能继续维持这种状态的行驶(步骤s40)。在能继续行驶的情况下(步骤s40;是),返回步骤s40继续行驶。在无法继续行驶的情况下(步骤s40;否),即检测到障碍物的情况下,移动体10停止行驶,向终端14输出重新设定请求(步骤s42)。终端14通知获取到重新设定请求的意思(步骤s44),促使用户重新设定指定输送路径r2。由用户向终端14输入指定输送路径r2,终端14获取指定输送路径r2,使其显示于显示部74并输出至移动体10(步骤s18)。从步骤s18至步骤s32的处理与图9的说明相同,因此省略。在步骤s32中设定禁止路径,从运算装置12向移动体10输出开始作业的意思的指令后,移动体10重新开始在新设定的设定输送路径r3上的行驶(步骤s34a)。
[0136]
需要说明的是,在以上的说明中,对重新设定指定输送路径r2的意思进行了说明,但在到达对象物p的接近路径r0上的行驶中检测到障碍物的情况下,也可以按与设定输送路径r3的设定同样的顺序重新设定接近路径r0。
[0137]
此外,在以上的说明中,移动体10在行驶中检测到障碍物后,向输出重新设定请求的终端14请求指定输送路径r2的指定。不过,不限于此,也可以是,移动体10在检测到障碍物后,生成能避开该障碍物的新的路径(接近路径r0、设定输送路径r3),切换至该新的路径而行驶。即,移动体10也可以与用户的指示无关地,自己生成新的路径。在该情况下,移动体10向终端14发送新的路径的信息,终端14可以在获取到新的路径被用户许可的意思的信息的情况下开始新的路径上的行驶,也可以在不受用户的许可的情况下开始新的路径上的行驶。
[0138]
此外,在以上的说明中,将移动体10检测到障碍物作为触发(trigger),重新设定指定输送路径r2而更新了设定输送路径r3,但触发并不限于此。例如,也可以将由用户判断为想要更新设定输送路径r3作为触发,来更新设定输送路径r3。在该情况下,终端14在移动体10的作业中,受理指定输送路径r2的重新设定的输入,在重新设定了指定输送路径r2的情况下,向移动体10输出重新设定的指定输送路径r2的信息。移动体10在获取到重新设定的指定输送路径r2的信息后,例如停止行驶,生成设定输送路径r3。
[0139]
(确定其他作业内容的例子)
[0140]
在以上的说明中,指定了指定输送路径r2来作为指定作业信息,设定了设定输送路径r3来作为设定作业信息,但也可以由用户指定除了输送路径以外的作业内容。以下,对指定除了输送路径以外的作业内容的例子进行说明。
[0141]
图12和图13是表示指定输送对象物的顺序(输送顺序)的情况下的图像的图。运算装置12也可以基于初始指定信息,将对象物p的输送顺序设定为提案作业内容。在该情况下,如图12所示,终端14将表示对象物p的输送顺序的输送顺序图像pt1与提案输送路径r1一起显示于画面d。在图12的例子中,在提案作业内容中,设定为按对象物pa、pb、pc、pd、pe的顺序输送。
[0142]
在由用户确认了显示于画面d的输送顺序图像pt1而想要改变输送顺序的情况下,向终端14的输入部72输入指定输送顺序的信息来作为指定信息。例如,由用户在输送顺序图像pt1中选择想要变更输送顺序的对象物p的图像,执行变更输送顺序的操作。在图13的例子中,交换了对象物pd与对象物pe的输送顺序,在该情况下,例如,由用户执行使对象物pd的图像向对象物pe的图像的下侧移动的操作、使对象物pe的图像向对象物pd的图像的上侧移动的操作。终端14受理指定这样输送的顺序的意思的输入,作为指定作业信息,即作为表示输送顺序的信息而获取。终端14向移动体10输出表示输送顺序的信息来作为指定作业信息。移动体10将指定作业信息中指定的输送顺序设定为设定作业信息,按指定的输送顺序进行对象物p的输送。
[0143]
根据车辆v的布局,有时也存在若不卸下其他对象物p,则存在无法卸下的对象物p。例如在这样的情况下,通过指定输送顺序,能适当地卸下对象物p。需要说明的是,输送顺序的指定也可以在后述的第二实施方式中的装载的作业中应用。
[0144]
图14是表示指定对象物的输送方法的情况下的图像的图。运算装置12也可以将对象物p的输送方法设定为提案作业信息。本例中的对象物p的输送方法是指拾取对象物p时的货叉24的动作,更具体而言,可选择通常模式和侧移模式,通常模式是在不使货叉24侧移(side shift)的情况下拾取对象物p的模式,侧移模式是使货叉24侧移来拾取对象物p的模式。侧移是使货叉24横向移动的动作。运算装置12例如将通常模式设为提案作业信息。终端14将显示表示对象物p的输送方法的输送方法图像pt2与提案输送路径r1一起,显示于画面d。输送方法图像pt2例如可以根据输入部72的长按等用户的操作来显示。即,终端14的显示控制部88根据用户对终端14的操作,使输送方法图像pt2显示于显示部74。例如,在由用户在画面d上选择了想要变更输送方法的对象物p后,终端14的显示控制部88显示出输送方法图像pt2,由用户在输送方法图像pt2中选择侧移模式,由此指定输送方法。终端14通过指定作业信息获取部80来获取由用户指定的输送方法的信息,通过输出部90向移动体10输出为指定作业信息。移动体10将由指定作业信息指定的输送方法设定为设定作业信息,以指定的输送方法输送对象物p。在选择侧移模式的例子中,终端14通过指定作业信息获取部80,获取是否使用侧移来拾取对象物p的信息来作为指定作业信息(表示对象物p的输送方法的信息),通过输出部90向移动体10输出为指定作业信息。移动体10在获取使用侧移来拾取对象物p的意思的信息来作为指定作业信息的情况下,使用侧移来拾取对象物。
[0145]
根据车辆v的布局,有时存在若不使用侧移则无法卸下的对象物p。例如在这样的情况下,通过指定输送方法,能适当地卸下对象物p。需要说明的是,输送方法的指定也可以在后述的第二实施方式中的装载的作业中应用。
[0146]
图15是表示指定对象物的输送目的地的情况下的图像的图。运算装置12基于初始指定信息,指定对象物p的输送目的地区域ar1(输送目的地),获取到达指定的输送目的地区域ar1的提案输送路径r1,并将其输出至终端14。如图16所示,终端14将到达指定的输送目的地区域ar1的提案输送路径r1显示于画面d。在该例子中,也可以由用户执行变更输送目的地区域ar1(输送目的地)的操作。例如,由用户在画面d上选择想要变更的输送目的地区域ar1,指定变更后的输送目的地区域ar1(输送目的地)的位置。可以由用户一并选择多个输送目的地区域ar1,一并变更多个输送目的地区域ar1的位置。终端14的指定作业信息获取部80在由用户输入了一并变更多个对象物p的输送目的地的位置的意思的情况下,获取用户所指定的变更后的输送目的地的位置的信息,即一并变更的多个对象物p的输送目的地的位置信息来作为指定作业信息,并将其输出至运算装置12。运算装置12获取针对变更后的输送目的地的位置而设定的提案输送路径r1,并将其输出至终端14。终端14从到达变更前的输送目的地的提案输送路径r1切换为到达变更后的输送目的地的提案输送路径r1并进行显示。
[0147]
(效果)
[0148]
如以上说明的那样,终端14具备:指定作业信息获取部80(第一获取部),获取由用户的输入的、表示移动体10的作业内容的指定作业信息;输出部90,将指定作业信息输出至外部的装置(在此为移动体10、运算装置12);设定作业信息获取部82(第二获取部),从外部的装置(在此为移动体10、运算装置12)获取基于指定作业信息而生成的、表示移动体10的作业内容的设定作业信息;以及显示控制部88,使设定作业信息显示于显示部74。移动体10所执行的作业内容大多预先设定或自动地确定。但是,有时要求与预先设定或自动确定的作业内容不同的作业,或预先设定作业内容或自动地确定本身困难。相对于此,本实施方式的终端14获取由用户指定的指定作业信息,并将其输出至移动体10、运算装置12等。然后,移动体10、运算装置12基于指定作业信息来生成表示接下来要进行的作业内容的设定作业信息,并将其输出至终端14。由用户确认终端14所显示的设定作业信息,使移动体10自动地进行作业。根据本实施方式,像这样基于用户的指定来确定移动体10所进行的作业,因此能反映用户的指示,适当地设定移动体10所进行的作业内容。
[0149]
此外,指定作业信息获取部80获取移动体10要输送的对象物p的信息和对象物p的输送目的地的信息(即初始指定信息)来作为指定作业信息。因此,移动体10能进行将用户所指定的对象物p输送至用户所指定的输送目的地的作业。因此,根据本实施方式,能反映用户的指示,适当地设定移动体10所进行的作业内容。
[0150]
此外,指定作业信息获取部80在由用户输入了一并变更多个对象物p的输送目的地的位置的意思的情况下,获取一并变更的多个对象物p的输送目的地的位置信息来作为指定作业信息。根据本实施方式,能受理基于用户的灵活的指示,因此能反映用户的指示,适当地设定移动体10所进行的作业内容。
[0151]
此外,指定作业信息获取部80获取包含移动体10的对象物p的输送路径r的指定输送路径r2的信息来作为指定作业信息。设定作业信息获取部82获取包含基于指定输送路径r2的信息而生成的输送路径r的设定输送路径r3的信息来作为设定作业信息。因此,移动体10能在基于用户所指定的输送路径而计算出的设定输送路径r3上输送对象物p。因此,根据本实施方式,能反映用户的指示,适当地设定移动体10所进行的作业内容。此外,指定输送
路径r2是由用户大致指定的路径,但不直接使用指定输送路径r2,而使用基于指定输送路径r2的设定输送路径r3,由此能反映用户的指示,并且设定与设备w的状况、移动体10的性能等相应的适当的输送路径。
[0152]
此外,终端14还包括提案作业信息获取部84(第三获取部)。提案作业信息获取部84在移动体10开始输送前,从外部的装置(运算装置12、移动体10)获取作为针对用户提出的输送路径r的提案输送路径r1的信息。指定作业信息获取部80在获取到了提案输送路径r1的信息后,获取对提案输送路径r1进行了修正的指定输送路径r2的信息来作为指定作业信息。根据本实施方式,在用户所指示之前,经由终端14向用户提出了预先自动地设定的提案输送路径r1,因此能抑制用户指定输送路径r的负担。
[0153]
此外,终端14还包括:重新设定请求获取部86(第四获取部),从外部的装置(移动体10、运算装置12)获取请求输送路径r的重新设定的意思的信息(重新设定请求信息)。指定作业信息获取部80在获取到重新设定请求信息后,获取指定输送路径r2的信息。根据本实施方式,在移动体10的作业中,能由用户修正输送路径r,因此能适当地设定移动体10所进行的作业内容。
[0154]
此外,指定作业信息获取部80获取对移动体10要输送的多个对象物p指定输送的顺序的意思的信息来作为指定作业信息。根据本实施方式,能由用户指定输送顺序,因此能适当地设定移动体10所进行的作业内容。
[0155]
此外,指定作业信息获取部80获取表示移动体10要输送的对象物p的输送方法的信息来作为指定作业信息。根据本实施方式,能由用户指定输送方法,因此能适当地设定移动体10所进行的作业内容。此外,指定作业信息获取部80获取是否利用使移动体10的货叉24横向移动的侧移来拾取对象物p的信息来作为表示对象物的输送方法的信息。根据本实施方式,也能由用户指示侧移,因此能适当地设定移动体10所进行的作业内容。
[0156]
此外,显示控制部88根据用户对终端10的操作,使表示对象物p的输送方法的图像(输送方法图像pt2)显示于显示部74。根据本实施方式,根据用户的操作显示输送方法图像pt2,因此能易于由用户指定输送方法。
[0157]
此外,本实施方式的控制系统1包括:终端14;以及基于设定作业信息来执行作业的移动体10。根据该控制系统1,能反映用户的指示,适当地设定移动体10所进行的作业内容。
[0158]
此外,可以是,移动体10基于指定作业信息来对设定作业信息进行设定,将设定的设定作业信息输出至终端14。根据该控制系统1,通过移动体10与终端14的通信设定作业内容,因此能迅速地设定移动体10所进行的作业内容。
[0159]
此外,移动体10将作为对象物p的输送路径的设定输送路径r3设定为设定作业信息。根据该控制系统1,通过移动体10对设定输送路径r3进行设定,因此能迅速地设定输送路径。
[0160]
此外,移动体10在指定作业信息包含对象物p的朝向的信息的情况下,基于对象物p的朝向来对设定输送路径r3进行设定。根据该控制系统1,基于对象物p的朝向来对设定输送路径r3进行设定,能根据对象物p的朝向来适当地设定输送路径。
[0161]
此外,移动体10通过模型预测控制来对设定输送路径进行设定。根据该控制系统1,使用模型预测控制,因此能适当地设定输送路径。
[0162]
此外,移动体10计算出多个成为对象物p的输送路径的候选的路径,将多个路径中与作为由用户指定的输送路径的指定输送路径r2最接近的路径设定为设定输送路径r3。根据该控制系统1,能设定适当反映了用户的意图的输送路径。
[0163]
此外,移动体10在对象物p的输送路径(指定输送路径r2)未被用户指定的情况下,将作为预先设定的输送路径的提案输送路径r1设定为设定输送路径r3。根据该控制系统1,在用户许可了提案输送路径r1的情况下,通过将该提案输送路径r1设为设定输送路径r3,能适当地设定输送路径。
[0164]
此外,移动体10在设定输送路径r3未被用户许可的情况下,基于用户新指定的输送路径(指定输送路径r2),更新并设定输送路径r3。根据该控制系统1,能设定适当反映了用户的意图的输送路径。
[0165]
此外,移动体10能切换第一模式和第二模式,第一模式是基于作为由用户指定的对象物p的输送路径的指定输送路径r2对设定输送路径r3进行设定的模式,第二模式是与指定输送路径r2无关地自动对设定输送路径r3进行设定的模式。根据该控制系统1,能根据用户对控制系统1的可靠度等来切换模式,因此能根据用户的意图设定适当的输送路径。
[0166]
此外,移动体10在行驶中检测到障碍物后,将向用户请求输送路径的重新设定的意思的重新设定请求信息输出至终端14。根据该控制系统1,通过由用户设定避开障碍物的路径,能设定避开障碍物的适当的路径。
[0167]
此外,移动体10在行驶中检测到障碍物后,生成能避开障碍物的新的输送路径,切换至新的输送路径而行驶。根据该控制系统1,能自动设定避开障碍物的路径,减少用户的负担,并且设定避开障碍物的适当的路径。
[0168]
此外,可以是,控制系统1还包括:运算装置12,基于指定作业信息来对设定作业信息进行设定,输出设定的设定作业信息。根据该控制系统1,在运算装置12侧设定作业内容,因此能降低移动体10的运算负荷。
[0169]
此外,可以是,控制系统1还包括:运算装置12,设定禁止移动体10行驶的禁止路径。根据该控制系统1,通过设定禁止路径,能抑制移动体10彼此的碰撞等。
[0170]
此外,运算装置12将与其他移动体预定行驶的路径近的路径设定为禁止路径。根据该控制系统1,通过像这样设定禁止路径,能抑制移动体10彼此的碰撞等。
[0171]
此外,运算装置12在将作为移动体10输送对象物p的路径的设定输送路径r3的至少一部分设定为禁止路径的情况下,在禁止路径的设定解除之前,不使移动体10开始行驶。根据该控制系统1,通过不使移动体10在禁止路径上行驶,能抑制移动体10彼此的碰撞等。
[0172]
此外,本实施方式的控制方法包括:获取由用户输入的、表示移动体10的作业内容的指定作业信息的步骤;将指定作业信息输出至外部的装置的步骤;从外部的装置获取基于指定作业信息而生成的、表示移动体10的作业内容的设定作业信息的步骤;以及使设定作业信息显示于显示部74的步骤。根据该控制方法,能反映用户的指示,适当地设定移动体10所进行的作业内容。
[0173]
此外,本实施方式的程序使计算机执行:获取由用户输入的、表示移动体10的作业内容的指定作业信息的步骤;将指定作业信息输出至外部的装置的步骤;从外部的装置获取基于指定作业信息而生成的、表示移动体10的作业内容的设定作业信息的步骤;以及使设定作业信息显示于显示部74的步骤。根据该程序,能反映用户的指示,适当地设定移动体
10所进行的作业内容。
[0174]
(第二实施方式)
[0175]
接着,对第二实施方式进行说明。在第二实施方式中,在将对象物p装载于车辆v这一点与第一实施方式不同。在第二实施方式中,对于与第一实施方式构成共同的部位省略说明。
[0176]
图16是本公开的至少一个实施方式的控制系统的示意图。如图16所示,在第二实施方式中,移动体10将配置于设备w的设置区域ar0的对象物p输送至车辆v的货台pv内的输送目的地区域ar1。移动体10按照接近路径r0和接近轨道tr0来接近设置区域ar0的对象物p。移动体10拾取设置区域ar0的对象物p,按照输送路径r输送至车辆v的输送目的地区域ar1,在输送目的地区域ar1装载对象物p。接近路径r0和接近轨道tr0的设定方法与第一实施方式相同,因此省略说明。
[0177]
图17是表示显示于显示部的提案输送路径的例子的示意图。如图17所示,终端14使如下图像显示于显示部74的画面d:车辆v的图像、车辆v内的设置区域ar0的图像、对象物p的图像、输送目的地区域ar1的图像以及提案输送路径r1的图像。作为提案作业信息的提案输送路径r1作为设备w的设置区域ar0至车辆v的输送目的地区域ar1的路径,是由运算装置12获取到的输送路径r。输送目的地区域ar1的获取方法与第一实施方式相同,因此省略说明。
[0178]
图18是表示显示于显示部的提案输送路径的例子的示意图。如图18所示,终端14在获取到提案输送路径r1并显示于画面d后,获取作为指定作业信息的指定输送路径r2,使其显示于画面d。指定输送路径r2是由用户输入的输送路径r。指定输送路径r2的获取方法与第一实施方式相同,因此省略说明。
[0179]
图19是表示显示于显示部的设定输送路径的例子的示意图。如图19所示,终端14使作为设定作业信息的设定输送路径r3显示于画面d。设定输送路径r3是通过移动体10或运算装置12基于指定输送路径r2而设定的输送路径r。设定输送路径r3的设定方法与第一实施方式相同,因此省略说明。
[0180]
如以上说明的那样,控制系统1也可以在将对象物p装载于车辆v时应用。
[0181]
以上,对本发明的实施方式进行了说明,但实施方式并不受上述内容限定。此外,在上述的构成要素中,包含所属技术领域的技术人员容易假定的部分、本质上相同的部分、所谓的均等范围内的部分。而且,上述构成要素可以适当地进行组合。而且,在不脱离上述的实施方式的主旨的范围内,可以进行构成要素的各种省略、置换或变更。
[0182]
附图标记说明
[0183]
1控制系统
[0184]
10移动体
[0185]
12运算装置
[0186]
14终端
[0187]
74显示部
[0188]
80指定作业信息获取部(第一获取部的一个例子)
[0189]
82设定作业信息获取部(第二获取部的一个例子)
[0190]
84提案作业信息获取部(第三获取部的一个例子)
[0191]
86重新设定请求获取部(第四获取部的一个例子)
[0192]
88显示控制部
[0193]
90输出部
[0194]
ar0设置区域
[0195]
ar1输送目的地区域
[0196]
p对象物
[0197]
r输送路径
[0198]
r0接近路径
[0199]
r1提案输送路径
[0200]
r2指定输送路径
[0201]
r3设定输送路径
[0202]
tr0接近轨道
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1