一种仿人机器人跳跃着地状态检测系统与方法
1.本发明属于仿人机器人技术领域,具体涉及一种仿人机器人跳跃着地状态检测系统与方法。
背景技术:
2.仿人机器人在运动过程中使用外部传感器测量环境信息,一般包括imu传感器、力传感器、触觉传感器、视觉传感器等,这些传感器的更新周期大多为100
‑
300hz左右;然而,机器人在跳跃之后与地面发生碰撞到产生最大冲击力的时间一般在1ms以内。如果仅根据外部传感器测量的环境信息,难以实时检测机器人与地面的碰撞情况,使仿人机器人跳跃之后的落地稳定控制和机器人运动状态切换的控制变得十分困难。
3.当前对于仿人机器人运动状态检测方法大多关于机器人双足行走等运动,很少有针对类似于机器人跳跃落地、机器人运动状态变化较大的情况的状态检测方法。
技术实现要素:
4.针对现有技术中存在不足,本发明提供了一种仿人机器人跳跃着地状态检测系统与方法,利用机器人跳跃过程的下肢各关节期望控制电流和实际控制电流的差值来判断机器人是否落地,并根据落地时仿人机器人的运动状态,获取期望运动角度,完成仿人机器人落地后的运动控制。
5.本发明是通过以下技术手段实现上述技术目的的。
6.一种仿人机器人跳跃着地状态检测方法,具体为:
7.通过建立仿人机器人受力的动力学方程,利用当前仿人机器人的运动状态计算机器人在空中时各个关节所需的关节控制力矩τ,从而获得仿人机器人各关节的期望控制电流i
iref
;
8.仿人机器人完成期望运动时,由各关节的期望控制电流i
iref
,得到各关节的期望控制电流与实际控制电流之间的误差δi,当δi大于允许值δi时,判定仿人机器人与地面接触;
9.在仿人机器人与地面接触时,运动控制器根据此时仿人机器人的运动状态,计算仿人机器人全身各个连杆的姿态,结合仿人机器人足部与地面的夹角,生成新的期望运动角度,并传输给关节控制器,完成仿人落地后的运动控制。
10.进一步地,所述期望控制电流i
iref
由以下公式计算得到:
[0011][0012]
其中:k
i
为仿人机器人各关节对应的实际控制电流与驱动力矩的转换比例系数,ξ
i
为仿人机器人各关节对应的速度与阻尼力的转换比例系数,τ为各个关节所需的关节驱动力矩,且i=1,2,
…
,6。
[0013]
进一步地,所述各关节的期望控制电流与实际控制电流之间的误差δi由以下公式计算得到:
[0014][0015]
其中,δi
i
=i
i
‑
i
iref
,i
i
为机器人关节驱动器反馈的实际控制电流。
[0016]
进一步地,所述允许值δi通过如下方式获取:多次将仿人机器人吊离地面,并对仿人机器人发送运动指令,模拟仿人机器人在不受外力的情况下的运动状态。
[0017]
进一步地,所述仿人机器人的运动状态包括:仿人机器人躯干姿态θ、各个关节实际的运动角度q和角速度脚底与地面的接触力f。
[0018]
更进一步,所述躯干姿态θ由imu传感器测量得到,所述运动角度q和角速度由电子码盘测量得到,所述接触力f由六维力/力矩传感器测量得到。
[0019]
更进一步,所述imu传感器、电子码盘和六维力/力矩传感器的刷新频率均设置为200hz。
[0020]
进一步,所述各关节的期望控制电流与实际控制电流误差δi与允许值δi的判断周期设置为1000hz。
[0021]
一种仿人机器人跳跃着地状态检测系统,其特征在于,包括:
[0022]
运动控制器,根据运动指令和仿人机器人的运动状态,生成机器人各关节期望的运动角度;计算得到各关节的期望控制电流与实际控制电流之间的误差δi,并判断所述δi与允许值δi的大小关系,从而判定仿人机器人是否与地面接触;
[0023]
关节驱动器,由所述各关节期望的运动角度和机器人关节运动状态,计算各个关节控制电流,并反馈关节的实际控制电流;
[0024]
各关节电机,根据所述关节控制电流驱动各关节运动。
[0025]
本发明的有益效果为:
[0026]
(1)本发明利用当前仿人机器人的运动状态计算机器人在空中时各个关节所需的关节控制力矩,从而获得仿人机器人各关节的期望控制电流;仿人机器人完成期望运动时,由各关节的期望控制电流,得到各关节的期望控制电流与实际控制电流之间的误差,当误差值大于允许值时,判定仿人机器人与地面接触;本发明可以精确获取机器人着地状态,在判定机器人与地面接触后,运动控制器生成新的期望运动角度,并传输给关节控制器,完成仿人机器人落地后的运动稳定性控制;本发明由于能够判定仿人机器人是否与地面接触,实现仿人机器人的控制,从而使机器人运动状态切换的控制变得容易。
[0027]
(2)本发明中imu传感器、电子码盘和六维力/力矩传感器的刷新频率均设置为200hz,各关节的期望控制电流与实际控制电流误差与允许值的判断周期设置为1000hz,从而实时检测机器人与地面的碰撞情况,实现仿人机器人的精准控制。
附图说明
[0028]
图1为本发明所述仿人机器人控制系统框图;
[0029]
图2为本发明所述仿人机器人动力学模型示意图;
[0030]
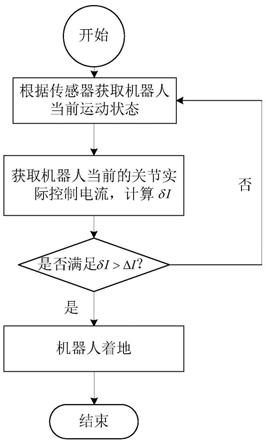
图3为本发明所述仿人机器人着地检测方法流程图。
具体实施方式
[0031]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0032]
针对仿人机器人起跳之后的落地检测与状态估计问题,本发明提出一种基于机器人运动状态变化检测碰撞的落地检测方法,并计算落地时刻机器人的身体姿态,为机器人落地控制提供必要的控制参数和控制状态切换。
[0033]
本实施例中的仿人机器人具有手臂、躯干、腿部、脚部等结构,能够依靠双腿进行运动,完成行走、跳跃、奔跑等移动方式。机器人脚踝处安装有六维力/力矩传感器,能够测量机器人脚底与地面的接触力f,机器人躯干固定有imu传感器,能够测量机器人躯干相对于外界姿态θ,机器人每个关节装有电子码盘,能够测量每个关节实际的运动角度q以及角速度q,各个传感器的刷新频率为200hz。如图1所示为仿人机器人的运动控制系统框图,机器人运动控制器根据运动指令和仿人机器人的运动状态,生成机器人各关节期望的运动角度q
ref
,控制周期为200hz,下发给关节驱动器,关节驱动器还根据机器人关节运动状态(关节实际的运动角度和角速度)计算各个关节控制电流i
con
,控制周期为1000hz,驱动各关节电机运动,实现机器人全身运动,关节驱动器反馈关节的实际控制电流i的大小。
[0034]
图2所示为仿人机器人的动力学模型,通过一个七连杆结构的简化动力学模型来计算仿人机器人的控制参数,两腿分别具有髋关节、膝关节、踝关节三个主动自由度,由仿人机器人的关节电机驱动。其中q1、q2、q3分别为仿人机器人右腿的髋关节、膝关节、踝关节运动的角度,q4、q5、q6分别为仿人机器人左腿的髋关节、膝关节、踝关节运动的角度,可以通过安装在机器人关节处的电子码盘测量;m0为仿人机器人上身质量,m1、m2、m3分别为仿人机器人右腿的大腿、小腿和足部质量,m4、m5、m6分别为仿人机器人左腿的大腿、小腿和足部质量;θ0为仿人机器人上身与竖直方向的夹角,可以通过imu传感器测量,θ1和θ2分别为仿人机器人右足、左足与地面的夹角,由仿人机器人上身与竖直方向的夹角θ0计算得到。
[0035]
如图3所示,为本发明仿人机器人跳跃着地状态检测方法的流程图,由于针对的是仿人机器人起跳之后的落地检测与状态估计问题,因此可以假设机器人已经离开地面,处于空中运动阶段,仅受重力的作用,机器人整体的运动为自由落体运动;建立仿人机器人受力的动力学方程:
[0036][0037]
其中:q=[q1,q2,q3,q4,q5,q6],为仿人机器人下肢各关节角度;为角加速度;m(q)为仿人机器人的质量系数矩阵;为科氏力、离心力的系数矩阵;g(q)为重力;τ=[τ1,τ2,τ3,τ4,τ5,τ6],为仿人机器人下肢各关节的驱动力矩,具体地,τ1为右腿髋关节的驱动力矩,τ2为右腿膝关节的驱动力矩,τ3为右腿踝关节的驱动力矩,τ4为左腿髋关节的驱动力矩,τ5为左腿膝关节的驱动力矩,τ6为左腿踝关节的驱动力矩;f为机器人受到接触力,j为操作空间到关节空间的雅可比转换矩阵,因此,当仿人机器人不受到的重力以外的外力时,公式(1)右边第二项j
t
f=0。因此可以通过公式(1),利用机器人当前运动状态(脚底与地面的接触力f、关节实际的运动角度q和角速度机器人躯干相对于外界的姿态θ)机器人在空中时各个关节所需的关节驱动力矩τ,从而获得机器人各关节的期望控制电流i
iref
:
[0038]
[0039]
其中:k
i
为仿人机器人各关节对应的实际控制电流与驱动力矩的转换比例系数,ξ
i
为仿人机器人各关节对应的速度与阻尼力的转换比例系数,根据仿人机器人不同关节实际使用的电机型号、传动参数不同,采用不同的转换比例系数。可以计算仿人机器人完成期望运动时,仿人机器人各关节的期望控制电流与实际控制电流之间的误差:
[0040][0041]
其中,δi
i
=i
i
‑
i
iref
(i=1,2,...,6),i
i
为机器人关节驱动器反馈的实际控制电流。通过将仿人机器人吊离地面,并对仿人机器人发送运动指令的方式,模拟仿人机器人在不受外力的情况下的运动状态;进行多次实验,获得机器人不受外力情况下δi的最大允许值δi。
[0042]
在机器人实际的跳跃运动过程中,当各关节的期望控制电流与实际控制电流误差δi大于允许值δi时,判定仿人机器人与地面接触,各关节的期望控制电流与实际控制电流误差δi与允许值δi的判断周期设置为1000hz;在仿人机器人与地面接触时,运动控制器根据此时imu传感器测量的机器人躯干姿态θ、各个关节实际的运动角度q和角速度脚底与地面的接触力f,通过正运动学计算仿人机器人全身各个连杆的姿态,结合仿人机器人足部与地面的夹角θ1、θ2,生成新的期望运动角度,并传输给关节控制器及关节电机,实现机器人全身运动,使仿人机器人能够完成落地后的运动控制。
[0043]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1