一种复合翼无人机的自抗扰控制器及其建立方法
1.本发明属于无人机技术领域,具体涉及一种复合翼无人机的自抗扰控制器及其建立方法。
背景技术:
2.无人飞行器(unmanned aerial vehicle,uav)简称无人机,是指利用无线电设备进行遥控或计算机程序自主控制的不载人飞行器,具有使用简单,安全性高,成本低廉的特点。早期无人机种类单一,飞行高度低,续航能力差,应用场景有限。伴随着微处理器、微型电机、新型能源、新型复合材料等快速发展,无人机变得种类繁多,飞行高度和续航能力大幅度提升。
3.由于不同应用场景(作业高度、作业距离、作业时间、任务种类等)对无人机有着不同的需求,诞生出了多种类型的无人飞行器,固定翼与旋翼组成复合式结构无人飞行器,称作复合翼无人机,是一种垂直起降固定翼无人机。这种无人机兼顾了旋翼和固定翼的优势,广泛应用于复杂场景测绘、救灾救援、农业植保、物流配送等方面,具有重要的研究意义和应用价值。复合翼无人机的控制涉及两个模式的切换,目前市面上大多数复合翼无人机在旋翼系统和固定翼系统之间过渡切换过程中存在控制不稳定性现象,经常出现切换过程中无人机高度突然下降或者高度控制不稳定的现象,特别在过渡模式下,当复合翼无人机收到干扰后,飞行高度极其容易出现较大波动甚至坠机,使用自抗扰控制器后,具有一定改善,但仍有不少问题。因此如何将复合翼无人机的两个系统融合并实现稳定飞行,具有极大的挑战性。
技术实现要素:
4.有鉴于此,本发明提供了一种复合翼无人机的自抗扰控制器及其建立方法,在基于自抗扰控制的复合翼无人机控制方式中加入了过渡过程,增加了控制的稳定性。
5.为实现上述目的,本发明的一种复合翼无人机的自抗扰控制器,包括跟踪微分器、扩张状态观测器以及系统控制律;
6.其中,跟踪微分器用于给输入信号安排过渡过程和提取微分;扩张状态观测器用于用来实时估计系统的扰动并实时给予补偿;系统控制律用于提高系统动态性能;
7.其中,通过非线性权重分配提高过渡平稳性,具体如下:
[0008][0009]
其中,α是固定翼系统权重,v是无人机空速,v
min
是最小转化空速,v
max
是最大转化空速,c
l
为升力系数,是以空速v进行巡航时的迎角。
[0010]
其中,所述跟踪微分器形式如下所示:
[0011]
fh=fhan(v1(k)
‑
v(k),v2(k),r,h1)
[0040]
其中,z1,z2分别表征系统的原有状态,用于跟踪微分器得到的v1(k),v2(k),其中,k代表离散时刻中的k时刻。
[0041]
本发明还提供了一种复合翼无人机的自抗扰控制器的建立方法,包括如下步骤:
[0042]
步骤一:建立复合翼无人机四旋翼模式、固定翼模式以及过渡模式机体坐标受力与力矩;
[0043]
步骤二:根据步骤一中建立的模型,将自抗扰控制器用于过渡模式四旋翼系统,设计基于自抗扰控制技术的姿态控制中的跟踪微分器,该跟踪微分器形式如下所示:
[0044]
fh=fhan(v1(k)
‑
v(k),v2(k),r,h1)
[0045]
v1(k+1)=v1(k)+h2v2(k)
[0046]
v2(k+1)=v2(k)+h2fh
[0047]
其中,v(k)代表输入离散信号,k代表离散时刻中的k时刻,fhan为最速综合函数,v1(k)与v2(k)分别为跟踪的输入信号本身以及其导数,r,h1分别代表放大因子与滤波因子,h2代表步长因子;最速综合函数fhan(x1,x2,r,h)具体表达式如下所示:
[0048]
d=rh2,a0=hx2[0049]
y=x1+a0[0050][0051]
a2=a0+sign(y)(a1‑
d)/2
[0052]
s
y
=[sign(y+d)
‑
sign(y
‑
d)]/2
[0053]
a=(a0+y
‑
a2)s
y
+a2[0054]
s
a
=[sign(a+d)
‑
sign(a
‑
d)]/2
[0055]
fhan=
‑
r(a/d
‑
sign(a))s
a
‑
rsign(a)
[0056]
步骤三:设计如下三阶扩张状态观测器(eso),用来实时估计系统的扰动并实时给予补偿:
[0057]
e=z1‑
y
[0058][0059][0060][0061]
其中,z1,z2分别表征系统的原有状态,z3为表征系统扩张状态的变量,包含了系统模型的不确定性以及所受内外的总体扰动,y为实际系统的反馈值,bu(t
‑
τ)代表输入到系统模型并考虑电机响应延时的控制量,β
01
,β
02
,β
03
分别为观测器增益,与系统的采样步长有关;
[0062]
步骤四:根据观测器得到的系统状态z1,z2,跟踪微分器得到的v1(k),v2(k),得到误差e1及误差的微分e2:
[0063]
e1=v1(k)
‑
z1[0064]
e2=v2(k)
‑
z2[0065]
设计的非线性控制率如下:
[0066]
u0=b1fal(e1,α1,δ1)+b2fal(e2,α2,δ2)
[0067]
其中b1,b2分别为控制量增益,fal(e,α,δ)为一非线性函数,其具体表达式如下所
示:
[0068][0069]
步骤五:设计出非线性反馈律后,根据自抗扰控制原理得到系统控制律为:
[0070][0071]
其中b0是系统模型中控制量放大倍数的估计值,u为控制器的实际输出;
[0072]
步骤六:提出非线性权重分配提高过渡平稳性:
[0073][0074]
其中,α是固定翼系统权重,v是无人机空速,v
min
是最小转化空速,v
max
是最大转化空速,c
l
为升力系数,是以空速v进行巡航时的迎角。
[0075]
其中,所述四旋翼模式受力与力矩如下:
[0076][0077][0078][0079]
其中i表示第i个电机,ω
i
表示第i个电机的转速,k
f
表示旋翼螺旋桨的升力系数,k
t
为旋翼螺旋桨的扭矩系数。
[0080]
其中,所述固定翼模式受力与力矩如下:
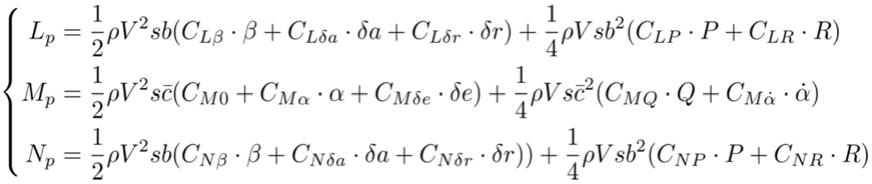
[0081][0082][0083]
其中b、s表示机翼展长、机翼弦长,机翼面积。c
l
、c
d
、c
s
表示升力系数、阻力系数、侧力系数。c
lβ
表示滚转力矩对侧滑角的导数,c
lδa
、c
lr
表示副翼舵偏角、方向舵偏角对滚转力矩影响,c
lp
表示相对于滚转角速度的滚转力矩系数,c
lr
表示相对于偏航角速度的滚转力矩系数。c
m0
表示零迎角时机体产生的俯仰力矩系数,c
mα
表示俯仰力矩系数对迎角的导数,c
mδe
表示升降舵偏角对俯仰力矩影响,c
mq
表示相对于俯仰角速度的俯仰力矩系数,c
mα
表示相对于迎角加速度的俯仰力矩系数。
[0084]
其中,所述过渡模式受力与力矩如下:
[0085][0086][0087]
其中,复合翼无人机动力学方程与运动学方程如下:
[0088][0089][0090]
其中(
·
)表示三种飞行模式:四旋翼模式q,固定翼模式p,过渡模式f,φ、θ、ψ分别表示滚转、俯仰和偏航姿态角。
[0091]
有益效果:
[0092]
本发明在基于自抗扰控制的复合翼无人机控制方式中加入了过渡过程,增加了控制的稳定性,自抗扰控制器具有精度高、抗扰能力强的优点,避免了复合翼无人机在飞行过程中涉及模式切换过程中出现高度控制不稳定的现象,将复合翼无人机的两个系统融合并实现稳定飞行。
附图说明
[0093]
图1为本发明仿真实例中传统pid控制器与本发明自抗扰控制器的空速变化示意图;
[0094]
图2为本发明仿真实例中传统pid控制器与本发明自抗扰控制器的权重分配关系图;
[0095]
图3(a)为本发明仿真实例中过渡模式下使用传统pid控制器的高度变化示意图;
[0096]
图3(b)为本发明仿真实例中过渡模式下使用自抗扰控制器的高度控制效果示意图;
[0097]
图4(a)为本发明仿真实例中使用pid控制器的扩张状态观测器对扰动观测结果示意图;
[0098]
图4(b)为本发明仿真实例中使用自抗扰控制器的扩张状态观测器对扰动观测结果示意图;
[0099]
图5为本发明仿真实例中复合翼无人机整个飞行过程中的位置变化示意图。
具体实施方式
[0100]
下面结合附图并举实施例,对本发明进行详细描述。
[0101]
复合翼无人机在飞行过程中涉及多个模式的切换,且切换过程中容易出现高度控制不稳定的现象,因此采用具有抗扰能力高度控制器是非常必要的。传统pid控制器采取给定与输出量反馈之差作为控制信号,用误差消除误差,自抗扰控制器是由pid控制器演变而来,与现代控制理论相结合,采用“观测+补偿”的方法。自抗扰控制器中的非线性扩张状态观测器存在着参数调节困难的问题,高志强教授提出了线性扩张状态观测器,并给出了带宽法的调参方法。
[0102]
本发明将自抗扰控制器用于旋翼系统的高度控制,用f
q
表示自抗扰高度控制器输出,然后乘以旋翼系统权重得到虚拟控制量f
q
,将f
q
与m
q
、l
q
、n
q
输入混控器解算四轴电机转速。本发明的自抗扰控制器包括跟踪微分器、扩张状态观测器、系统控制律三部分,其中跟踪微分器给输入信号安排合适的过渡过程和提取微分,扩张状态观测器对内外扰动进行估计,以及使用系统控制律提高系统动态性能。自抗扰控制器具有精度高、抗扰能力强的优点。
[0103]
本发明的一种复合翼无人机的自抗扰控制器,包括跟踪微分器、扩张状态观测器以及系统控制律;
[0104]
其中,跟踪微分器用于给输入信号安排过渡过程和提取微分;扩张状态观测器用于用来实时估计系统的扰动并实时给予补偿;系统控制律用于提高系统动态性能;
[0105]
其中,通过非线性权重分配提高过渡平稳性,具体如下:
[0106][0107]
其中,α是固定翼系统权重,v是无人机空速,v
min
是最小转化空速,v
max
是最大转化空速,c
l
为升力系数,是以空速v进行巡航时的迎角。
[0108]
具体地,所述跟踪微分器形式如下所示:
[0109]
fh=fhan(v1(k)
‑
v(k),v2(k),r,h1)
[0110]
v1(k+1)=v1(k)+h2v2(k)
[0111]
v2(k+1)=v2(k)+h2fh
[0112]
其中v(k)代表输入离散信号,fhan为最速综合函数,v1(k)与v2(k)分别为跟踪的输入信号本身以及其导数,r,h1分别代表放大因子与滤波因子,h2代表步长因子;
[0113]
最速综合函数fhan(x1,x2,r,h)具体表达式如下所示:
[0114]
d=rh2,a0=hx2[0115]
y=x1+a0[0116][0117]
a2=a0+sign(y)(a1‑
d)/2
[0118]
s
y
=[sign(y+d)
‑
sign(y
‑
d)]/2
[0119]
a=(a0+y
‑
a2)s
y
+a2[0120]
s
a
=[sign(a+d)
‑
sign(a
‑
d)]/2
[0121]
fhan=
‑
r(a/d
‑
sign(a))s
a
‑
rsign(a)
[0122]
其中,r是控制量增益,h是精度因子,x1和x2是要控制跟踪的两个相关参数,其余量均为过程量。
[0123]
具体地,所述扩张状态观测器为:
[0124]
e=z1‑
y
[0125][0126][0127][0128]
其中,z1,z2分别表征系统的原有状态;z3为表征系统扩张状态的变量,包含了系统模型的不确定性以及所受内外的总体扰动;y为实际系统的反馈值;bu(t
‑
τ)代表输入到系统模型并考虑电机响应延时的控制量,b是增益,u是控制量,t
‑
τ是时间差;β
01
,β
02
,β
03
分别为观测器增益,与系统的采样步长有关;是对三个状态的误差估计值。
[0129]
具体地,所述系统控制律为:
[0130][0131]
其中b0是系统模型中控制量放大倍数的估计值,u为控制器的实际输出,z3为表征系统扩张状态的变量;
[0132]
u0=b1fal(e1,α1,δ1)+b2fal(e2,α2,δ2)
[0133]
其中b1,b2分别为控制量增益,fal(e,α,δ)具体表达式如下所示:
[0134][0135]
误差e1及误差的微分e2为:
[0136]
e1=v1(k)
‑
z1[0137]
e2=v2(k)
‑
z2[0138]
其中,z1,z2分别表征系统的原有状态,用于跟踪微分器得到的v1(k),v2(k),其中,k代表离散时刻中的k时刻。
[0139]
本发明还提供了对四旋翼模式高度通道的自抗扰控制器的建立方法,包括如下步骤:
[0140]
步骤一:建立复合翼无人机四旋翼模式、固定翼模式以及过渡模式机体坐标受力与力矩;
[0141]
其中,四旋翼模式受力与力矩如下:
[0142]
[0143][0144][0145]
其中i表示第i个电机,ω
i
表示第i个电机的转速,k
f
表示旋翼螺旋桨的升力系数,k
t
为旋翼螺旋桨的扭矩系数。
[0146]
固定翼模式受力与力矩如下:
[0147][0148][0149]
其中b、s表示机翼展长、机翼弦长,机翼面积。c
l
、c
d
、c
s
表示升力系数、阻力系数、侧力系数。c
lβ
表示滚转力矩对侧滑角的导数,c
lδa
、c
lr
表示副翼舵偏角、方向舵偏角对滚转力矩影响,c
lp
表示相对于滚转角速度的滚转力矩系数,c
lr
表示相对于偏航角速度的滚转力矩系数。c
m0
表示零迎角时机体产生的俯仰力矩系数,c
mα
表示俯仰力矩系数对迎角的导数,c
mδe
表示升降舵偏角对俯仰力矩影响,c
mq
表示相对于俯仰角速度的俯仰力矩系数,c
mα
表示相对于迎角加速度的俯仰力矩系数。
[0150]
过渡模式受力与力矩如下:
[0151][0152][0153]
复合翼无人机动力学方程与运动学方程如下:
[0154]
[0155][0156]
其中(
·
)表示三种飞行模式:四旋翼模式q,固定翼模式p,过渡模式f,φ、θ、ψ分别表示滚转、俯仰和偏航姿态角。
[0157]
步骤二:根据步骤一中建立的模型,将自抗扰控制器用于过渡模式四旋翼系统,设计基于自抗扰控制技术的姿态控制中的跟踪微分器,该跟踪微分器形式如下所示:
[0158]
fh=fhan(v1(k)
‑
v(k),v2(k),r,h1)
[0159]
v1(k+1)=v1(k)+h2v2(k)
[0160]
v2(k+1)=v2(k)+h2fh
[0161]
其中v(k)代表输入离散信号,其中,k代表离散时刻中的k时刻,fhan为最速综合函数,v1(k)与v2(k)分别为跟踪的输入信号本身以及其导数,r,h1分别代表放大因子与滤波因子,h2代表步长因子。
[0162]
最速综合函数fhan(x1,x2,r,h)具体表达式如下所示:
[0163]
d=rh2,a0=hx2[0164]
y=x1+a0[0165][0166]
a2=a0+sign(y)(a1‑
d)/2
[0167]
s
y
=[sign(y+d)
‑
sign(y
‑
d)]/2
[0168]
a=(a0+y
‑
a2)s
y
+a2[0169]
s
a
=[sign(a+d)
‑
sign(a
‑
d)]/2
[0170]
fhan=
‑
r(a/d
‑
sign(a))s
a
‑
rsign(a)
[0171]
其中,r是控制量增益,h是精度因子,x1和x2是要控制跟踪的两个相关参数,其余量均为过程量。
[0172]
步骤三:设计如下三阶扩张状态观测器(eso),用来实时估计系统的扰动并实时给予补偿:
[0173]
e=z1‑
y
[0174][0175][0176][0177]
其中,z1,z2分别表征系统的原有状态,z3为表征系统扩张状态的变量,包含了系统模型的不确定性以及所受内外的总体扰动,y为实际系统的反馈值,bu(t
‑
τ)代表输入到系统模型并考虑电机响应延时的控制量,b是增益,u是控制量,t
‑
τ是时间差;β
01
,β
02
,β
03
分别为观测器增益,与系统的采样步长有关;是对三个状态的误差估计值。
[0178]
步骤四:根据观测器得到的系统状态z1,z2,跟踪微分器得到的v1,v2,可以得到误
差e1及误差的微分e2:
[0179]
e1=v1‑
z1[0180]
e2=v2‑
z2[0181]
设计的非线性控制率如下:
[0182]
u0=b1fal(e1,α1,δ1)+b2fal(e2,α2,δ2)
[0183]
其中b1,b2分别为控制量增益,fal(e,α,δ)为一非线性函数,其具体表达式如下所示。
[0184][0185]
步骤五:设计出非线性反馈律后,根据自抗扰控制原理得到系统控制律为:
[0186][0187]
其中b0是系统模型中控制量放大倍数的估计值,u为控制器的实际输出。
[0188]
步骤六:通过非线性权重分配提高过渡平稳性,具体如下:
[0189][0190]
其中,α是固定翼系统权重,v是无人机空速,v
min
是最小转化空速,v
max
是最大转化空速,c
l
为升力系数,是以空速v进行巡航时的迎角。
[0191]
以旋翼模式向固定翼模式切换的过渡过程为例,对pid控制器与自抗扰控制器在复合翼无人机过渡模式的高度控制进行仿真对比如下:
[0192]
为了便于对比过渡模式下自抗扰控制器与pid控制器的控制效果,过渡过程中均采用基于模型的非线性权重分配方法,对高度通道输入从10s到25s间对应高度从0m增长为20m的斜坡信号,并在高度控制中增加均值为0,方差为0.001的测量噪声和方差为0.001的过程噪声。为了让两种控制方式的过渡模式同步进行,空速通道的输入从50s到65s间对应的空速从0m/s增长为17m/s的斜坡信号,设置过渡模式的最小转换空速vmin=10m/s,最大转换空速vmax=15m/s,仿真结果如下:
[0193]
图1显示两种控制器的空速变化,0s到50s处于四旋翼模式。50s到64s进入过渡模式,期间固定翼推力电机开始让飞机的空速快速增加,64s时空速达到16m/s。64s以后进入固定翼模式,65s后复合翼无人机开始以17m/s的空速平飞。图2显示两种控制器的权重分配关系,两种控制器均采用基于模型的非线性权重分配方法,从50s到64s为过渡模式,其中50s到58s之间由于v<vmin,固定翼系统仅推力电机工作,四旋翼系统权重依然为1。58s到64s之间vmin<v<vmax按照权重分配关系进行权重分配,四旋翼系统的权重随空速的增加而逐渐减小。
[0194]
图3(a)显示了过渡模式下使用pid控制器的高度变化,在10s到25s的垂直起飞过程中有0.5m的超调,从50s到64s的过渡过程中高度变化较大,且在第62s时的最大的高度波动为0.5m。图3(b)为自抗扰控制器高度控制效果示意图,在10s到25s的垂直起飞过程中没有出现超调,可以很好跟踪斜坡输入信号,从50s到64s的过渡过程中高度几乎没有发生变
化,在第62s时的最大的高度变化仅有0.04m。自抗扰控制器可以很好提高过渡模式下高度控制的稳定性。
[0195]
图4(a)为使用pid控制器的扩张状态观测器对扰动观测结果,图4(b)为使用自抗扰控制器的扩张状态观测器对扰动观测结果。在0s到50s的四旋翼模式下,扩张状态观测器观测出旋翼系统受到9.8m/s2竖直向下的重力加速度。从50s到64s为过渡模式,其中50s到58s之间由于v<vmin且固定翼保持0rad迎角姿态,扩张状态观测器观测出固定翼系统低空速状态下提供的较的小升力。在58s到64s之间由于vmin<v<vmax固定翼系统权重逐渐增加,伴随着空速与俯仰角姿态变化固定翼系统提供的升力迅速增加,旋翼系统的扩张状态观测器对固定翼系统产生的升力及受到的内外扰动进行观测,此时需要旋翼系统补偿的升力逐渐减少直至0,利用扩张状态观测器可以很好的观测出固定翼系统需要补偿的升力。图5为复合翼无人机整个飞行过程中的位置变化,先是以四旋翼模式垂直起飞,然后进入过渡模式,最后进入固定翼模式平飞。
[0196]
综上所述,以上仅为本发明的较佳实施实例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1