基于成像反馈技术的自动太阳跟踪器及自动太阳跟踪方法
1.本发明属于环境监测与光学遥感领域,尤其涉及一种基于成像反馈技术的自动太阳跟踪器。
背景技术:
2.人为源或天然源排放的挥发性有机物是大气臭氧污染与细颗粒物的关键前体物。我国城市区域臭氧生成由挥发性有机物主导,而非城市区域臭氧则由氮氧化物主导。随着氮氧化物排放控制日趋严格,挥发性有机物已成为我国城市大气臭氧与细颗粒物污染控制的关键因素。工业园区是重要的挥发性有机物人为排放源,主要体现在烷烃、烯烃等特征污染物的无组织排放。工业园区的挥发性有机物排放主要来自贮罐的呼吸与泄露、设备与管阀件的泄露、油品装车过程油气挥发、污水处理系统逸散等。这些排放源具有排放点多、面广、分散、无规则等特点,表现为大型面源或体积源,与污染气象相复合形成复杂污染特征,导致痕量污染气体排放监测与控制具有较大的困难性。
3.以太阳辐射作为光源,在移动平台上基于光学遥感技术测量痕量污染气体的柱浓度,并结合风速风向测量与gps数据计算痕量气体排放速率,对较大污染源的场地污染气体排放量的监测与评估具有重要意义。为实现移动柱浓度测量,差分吸收光谱技术与太阳掩星通量技术已被开发出来。其中,差分吸收光谱技术通常适用于紫外
‑
可见波段,已被应用于评估氮氧化物、二氧化硫与甲醛的工业排放;而太阳掩星通量技术通常使用中红外波段,主要被用于测量石化企业的挥发性有机物排放和农业生产中氨气的排放。
4.差分吸收光谱技术既可使用散射的太阳光也可使用直接太阳辐射,而太阳掩星通量技术仅可使用直接太阳辐射。因此,能精确跟踪太阳运动并将太阳光导入至测量不同波段的光谱仪的太阳跟踪器就成为了关键装置。光谱仪用太阳跟踪器通常使用两片平行反射镜将太阳辐射导入至光谱仪以实现对太阳高度角与方位角的跟踪。然而,使用开环控制调整两反射镜姿态无法实现对太阳的高精度跟踪,因此使用闭环反馈控制对移动平台测量十分必要。目前现有技术通常使用光电位置探测器检测太阳光斑中心与探测器中心之间间距并以此调整两反射镜姿态使两中心重合;而另一条技术路线为:使用高速相机拍摄太阳在光阑上所成图像并检测太阳图像中心与孔径光阑中心间距并以此调整两反射镜姿态。
5.在我国已公布的发明专利中,授权公告号为cn103246292b的专利涉及一种运动平台上的太阳自动跟踪方法,该专利光电探测单元采用光电位置探测器,不使用成像反馈技术,并且无法将太阳光分为红外光与紫外
‑
可见光两部分。授权公告号为cn102597798b的专利涉及一种太阳跟踪器设备和系统,该专利目的在于将定日镜自动朝向太阳,无法用于将太阳辐射导入光谱仪进行痕量气体柱浓度测量这一应用。
6.因此,针对以上问题,本发明提出一种基于成像反馈技术实现对太阳进行自动跟踪并将太阳辐射分为红外光与紫外
‑
可见光两部分并导入至测量不同波段的光谱仪的装置。
技术实现要素:
7.针对目前太阳跟踪技术的局限,本发明提供一种基于成像反馈技术实现对太阳进行自动跟踪并将太阳辐射分为红外光与紫外
‑
可见光两部分的装置。
8.本发明所采取的技术方案为:
9.一种基于成像反馈技术的自动太阳跟踪器,包括有跟踪器头部、控制系统、分光与成像光路。所述跟踪器头部包括反射镜一、竖直旋转滑台、反射镜二和水平旋转滑台,所述反射镜一用于跟踪太阳,接收太阳光辐射;反射镜二用于将反射镜一接收的太阳光辐射反射至分光与成像光路,竖直旋转滑台和水平旋转滑台分别用于调整反射镜一与反射镜二的姿态以跟踪太阳的高度角与方位角。
10.分光与成像光路依次设有排列在一条直线上的反射镜三、分光镜、中性密度滤光片、凸透镜和光阑,其中反射镜三用于接收反射镜二反射的太阳光,分光镜与主光轴成45度角放置,所述分光镜透射紫外
‑
可见光,反射红外光。将太阳辐射分为两部分以进入测量不同波段的光谱仪。
11.控制系统包括控制器、gps及惯性导航系统、计算机和相机,其中相机用于采集光阑小孔的像并反馈至计算机。gps及惯性导航系统用于自动太阳跟踪器的运动状态,并将获得的实时时间与经纬度信息以及俯仰角、横滚角信息反馈至计算机。计算机用于根据相机和gps及惯性导航系统反馈的信息进行判断和计算:若相机获取的照片中没有完整太阳图像,则根据实时时间与经纬度信息计算当前太阳高度角与方位角,并结合俯仰角、横滚角信息,计算反射镜一与反射镜二与当前太阳高度角与方位角在俯仰方向与水平方向的偏差,控制器根据偏差大小使用开环控制调整竖直旋转滑台与水平转动滑台,使反射镜一对准太阳。若照片中存在完整太阳图像,则根据实时时间与经纬度信息计算当前太阳高度角与方位角,同时对所拍摄太阳图像进行圆拟合或椭圆拟合以找到太阳的像的中心,并计算太阳的像的中心与光阑小孔的像的中心的像素点偏差,此偏差结合俯仰角、横滚角信息,计算反射镜一与反射镜二与当前太阳高度角与方位角在俯仰方向与水平方向的偏差。将计算的偏差结果反馈至控制器,控制器根据偏差结果控制竖直旋转滑台和水平旋转滑台调整反射镜一与反射镜二的姿态以跟踪太阳的高度角与方位角。
12.进一步地,还包括机架,所述分光与成像光路、相机和gps及惯性导航系统、跟踪器头部均固定在机架上。
13.进一步地,所述跟踪器头部还包括跟踪器架,所述反射镜一固定在竖直旋转滑台上,竖直旋转滑台与反射镜二固定在跟踪器架上,反射镜一与反射镜二的位置中心在一条直线上并与主光轴重合。跟踪器架固定在水平旋转滑台上,水平旋转滑台固定在机架上。
14.进一步地,还包括一光纤,用于将通过光阑孔的紫外
‑
可见光导出。
15.进一步地,所述相机成10
‑
45度将镜头对准光阑小孔,优选为20度。
16.进一步地,计算太阳的像的中心与光阑小孔的像的中心的像素点偏差具体为:
17.计算照片上太阳的像的中心与光阑小孔的像的中心在x轴和y轴上的像素点偏差个数,再结合太阳角直径与照片上太阳的像的直径计算每个像素点的弧度值,根据每个像素点的弧度值将x轴和y轴上的像素点偏差个数转换为角度即为水平方向与俯仰方向的像素点偏差。
18.本发明还提供了一种基于上述自动太阳跟踪器的自动太阳跟踪方法,具体为:
19.相机对光阑拍照并将照片传至计算机进行分析:
20.若相机获取的照片中没有完整太阳图像,则利用gps及惯性导航系统的实时时间与经纬度信息根据天体物理规律计算当前太阳高度角与方位角,并结合gps及惯性导航系统的俯仰角、横滚角信息,计算反射镜一与反射镜二与当前太阳高度角与方位角在俯仰方向与水平方向的偏差,根据偏差大小使用开环控制调整竖直旋转滑台与水平转动滑台,使反射镜一对准太阳。
21.若照片中存在完整太阳图像,则利用gps及惯性导航系统的实时时间与经纬度信息根据天体物理规律计算当前太阳高度角与方位角,同时对所拍摄太阳图像进行圆拟合或椭圆拟合以找到太阳的像的中心,并计算太阳的像的中心与光阑小孔的像的中心的像素点偏差,此偏差结合gps及惯性导航系统的实时时间与经纬度信息以及俯仰角、横滚角信息,计算反射镜一与反射镜二与当前太阳高度角与方位角在俯仰方向与水平方向的偏差,将计算的偏差结果反馈至控制器,控制器根据偏差结果控制竖直旋转滑台与水平转动滑台以调整反射镜姿态,使反射镜一对准太阳。
22.重新对光阑拍照,循环上述操作实时校正太阳跟踪器的姿态,保证太阳跟踪器始终对准太阳。
23.本发明与现有技术相比的优点如下:
24.1、使用成像反馈技术,无需定制专用电路,结构简单、性能稳定。
25.2、使用分光镜可以将太阳辐射分为紫外
‑
可见与红外光两部分以进入测不同波段的光谱仪。
附图说明
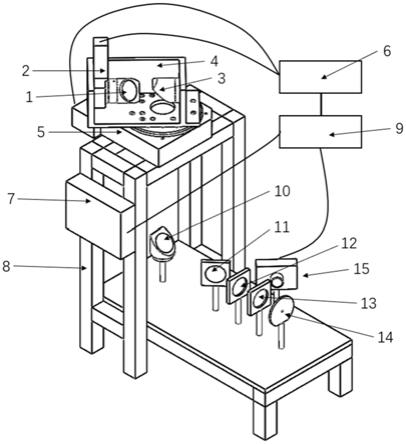
26.图1为基于成像反馈技术的自动太阳跟踪器结构示意图。
27.图2为本发明的系统控制逻辑流程图。
28.图中,反射镜一1、竖直旋转滑台2、反射镜二3、跟踪器架4、水平旋转滑台5、控制器6、gps及惯性导航系统7、机架8、计算机9、反射镜三10、分光镜11、中性密度滤光片12、凸透镜13、光阑14和相机15。
具体实施方式
29.本发明提供了一种基于成像反馈技术的自动太阳跟踪器,该装置使用两片平面反射镜与两个旋转滑台将太阳光竖直导入分光与成像光路,经平面反射镜变为水平方向后用分光镜分为红外光与紫外
‑
可见光,其中紫外与可见光经中性密度滤光片滤光、凸透镜聚焦后将太阳成像于光阑之上,通过高分辨率相机拍摄光阑孔与太阳的图像,确定太阳中心位置与光阑孔中心位置的偏差,并将该偏差经闭环控制算法反馈至两旋转滑台以调整两反射镜朝向,实现太阳中心与光阑孔中心重合。通过光阑孔的紫外
‑
可见光可由光纤导入至紫外
‑
可见光谱仪进行测量,而分光镜所分出的红外光可直接耦合进傅里叶变换红外光谱仪进行测量。同时该装置具有运动补偿系统,可以补偿该装置用于移动平台时因颠簸所产生的太阳跟踪误差。由于利用相机的成像反馈技术相对于传统的基于光电位置探测器的结构更为简单以及可在不利条件(薄云层与树木遮挡等)下工作,因此该设备的太阳跟踪更加稳定、准确、可靠,此外该装置能够应用于多情景下的太阳跟踪,如固定点使用或车载、船载、
机载等移动平台使用。
30.下面结合附图1和附图2,对本发明作进一步说明:
31.如图1所示,一种基于成像反馈技术的自动太阳跟踪器,包括有反射镜一1、竖直旋转滑台2、反射镜二3、跟踪器架4、水平旋转滑台5、控制器6、gps及惯性导航系统7、机架8、计算机9、反射镜三10、分光镜11、中性密度滤光片12、凸透镜13、光阑14和相机15。反射镜一1固定在竖直旋转滑台2上,竖直旋转滑台2与反射镜二3固定在跟踪器架4上,其中,反射镜一与反射镜二的位置中心在一条直线上并与主光轴重合。跟踪器架4固定在水平旋转滑台5上,水平旋转滑台5固定在机架8上。竖直旋转滑台2与水平旋转滑台5分别通过一根控制线与控制器6连接。反射镜三10、分光镜11、中性密度滤光片12、凸透镜13、光阑14成直线(主光轴)组成分光与成像光路安装在机架8底板上,其中反射镜三10置于反射镜二3下方,用于接收反射镜二3反射的太阳光;分光镜11呈45度角放置,分光镜11透射紫外
‑
可见光,反射红外光,将太阳辐射分为两部分以进入测量不同波段的光谱仪。相机15的镜头对准光阑14并与主光轴成一定角度,如10
‑
45度,优选为20度,相机15通过一根通信电缆与计算机9连接。
32.gps及惯性导航系统7固定在机架8上,用于测量光阑14和相机15的运动状态。控制器6与gps及惯性导航系统7分别通过一根通信电缆与计算机9连接,进行通信传输。
33.如图2所示,具体的自动太阳跟踪方法具体为:
34.相机15对光阑14拍照并将照片传至计算机9进行分析:
35.若照片中没有完整太阳图像,则利用gps及惯性导航系统7的实时时间与经纬度信息根据天体物理规律计算太阳位置即当前太阳高度角与方位角,再利用gps及惯性导航系统7的俯仰角、横滚角信息,计算反射镜一1、反射镜二3与当前太阳高度角与方位角在俯仰方向与水平方向的偏差,根据偏差大小使用开环控制调整竖直旋转滑台2与水平旋转滑台5以调整反射镜一1与反射镜二3的姿态,使反射镜一1对准太阳。
36.若照片中存在完整太阳图像,利用gps及惯性导航系统7的实时时间与经纬度信息根据天体物理规律计算太阳位置,同时使用算法对所拍摄太阳图像进行圆拟合或椭圆拟合以找到太阳的像的中心,并计算太阳的像的中心与光阑小孔的像的中心的像素点偏差,此像素点偏差结合gps及惯性导航系统7中俯仰角、横滚角信息,计算反射镜一1与反射镜二3与当前太阳高度角与方位角在俯仰方向与水平方向的偏差,将计算的偏差结果反馈至控制器,控制器根据偏差结果控制竖直旋转滑台2与水平旋转滑台5以调整反射镜一1与反射镜二3的姿态,使反射镜一1对准太阳。
37.其中,计算太阳的像的中心与光阑小孔的像的中心的像素点偏差具体为:
38.计算照片上太阳的像的中心与光阑小孔的像的中心在x轴和y轴上的像素点偏差个数,再结合太阳角直径与照片上太阳的像的直径计算每个像素点的弧度值,根据每个像素点的弧度值将x轴和y轴上的像素点偏差个数转换为角度即为水平方向与俯仰方向的像素点偏差。
39.重新对光阑拍照,循环上述操作实时校正太阳跟踪器的姿态,保证太阳跟踪器始终对准太阳。
40.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化或变动。这里无需也无法把所有的实施方式予以穷举。而由此所引申出的显而易见的变化或
变动仍处于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1