基于模糊神经网络的混凝土布料机器人控制方法
1.本发明涉及智能建造控制技术领域,特别涉及一种基于模糊神经网络的混凝土布料机器人控制方法。
背景技术:
2.随着科学技术的高速发展和国民经济的提高,我国越来越重视各类基础设施的建设,建筑工程施工方法是工程建设实施阶段的关键,混凝土浇筑是建筑施工领域的重要组成部分之一,对各类建筑施工的质量保证起着至关重要的作用。
3.混凝土浇筑,即布料作业,是指将混凝土材料浇筑至已设计好的模子中直至塑化的过程,现多采用混凝土泵车及泵送浇筑技术进行布料作业。然而,在实际混凝土泵车布料过程中,泵车臂架的协同操控往往依赖于施工现场操控人员的丰富经验,通过手动操控末端关节软管确保臂架末端浇筑口按照预期轨迹进行移动,从而较高质量地完成混凝土浇筑过程。然而,在此种操作方式下,存在一定的安全隐患,不仅直接影响浇筑的质量,更威胁着人身安全。且随着城市建设的规模愈发扩大,为了缓解建设用地紧张的局面,高层建筑的发展不断加快,同时建筑物结构的复杂程度也在不断加大,特别是在超大体积混凝土浇筑面、超高层建筑物、地下钢沉井的砼浇筑方面,对传统的臂架式混凝土泵车控制方法有着一定考验,因此,混凝土布料作业过程的机器人化对建筑工程及智能建造的发展显得尤为迫切和重要。
4.混凝土布料机器人作为自动化建筑平台的一部分,承担了混凝土的现场布料和浇筑任务,是基于臂架式混凝土泵车的新型技术衍生物,可以根据现场工作环境,通过对布料机器人各机械臂的动作控制实现对输料管末端的位姿控制及布料速率控制等,高效完成工作空间内的混凝土浇筑。目前,我国混凝土布料设备的控制系统主要采用的是传统的pid控制方式,结合专家经验进行控制器参数整定。然而,混凝土布料机器人具有流固耦合特性,其动力学模型是复杂的非线性方程,且理论模型和实际模型之间往往存在较大误差,在实际施工过程中,混凝土布料机器人由于工作条件较为恶劣,常常存在不确定的外部干扰因素。因此,需要设计一种更为合适的混凝土布料机器人非线性控制方法,以满足实际情况的动态需求,提高控制性能。
5.
技术实现要素:
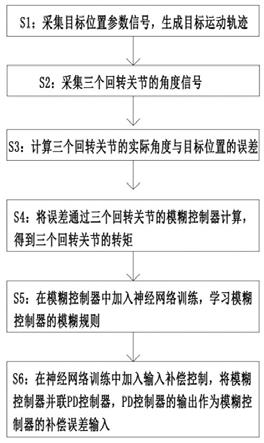
6.根据本发明实施例,提供了一种基于模糊神经网络的混凝土布料机器人控制方法,用于控制三关节回转式混凝土布料机器人的三个回转关节,实现控制三关节回转式混凝土布料机器人的机械臂末端浇筑口的位置,包含以下步骤:采集目标位置参数信号,生成目标运动轨迹;采集三个回转关节的角度信号;计算三个回转关节的实际角度与目标位置的误差;
将误差通过三个回转关节的模糊控制器计算,得到三个回转关节的转矩;在模糊控制器中加入神经网络训练,学习模糊控制器的模糊规则;在神经网络训练中加入输入补偿控制,将模糊控制器并联pd控制器,pd控制器的输出作为模糊控制器的补偿误差输入。
7.进一步,三关节回转式混凝土布料机器人对三个回转关节的关节角度进行独立控制。
8.进一步,三个回转关节的实际角度与目标位置的误差计算公式为:;为误差、为所述目标位置参数信号、为三个回转关节的角度信号。
9.进一步,模糊控制器有两个输入信号和一个输出信号。
10.进一步,模糊控制器采用非单值模糊器,非单值模糊器采用三角形隶属函数,将模糊控制器的输入x转化为以其为数学期望的高斯分布函数,与隶属函数联立求解点火水平。
11.进一步,以每个输入x的隶属度为中心,非单值模糊器的重要性与其离中心的距离为正相关。
12.进一步,控制器的点火强度计算公式为:;为点火强度,和分别为模糊控制器的两个输入x的高斯分布函数值。
13.进一步,将点火强度归一化得到的值为,模糊神经网络控制器的输出计算公式:;为模糊神经网络控制器的输出、为模糊神经网络控制器的后件参数。
14.根据本发明实施例的基于模糊神经网络的混凝土布料机器人控制方法,具有更低的计算复杂度和更高的控制精度,采用基于启发性的知识及语言决策规则设计的模糊神经网络控制方式,有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。且模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制,使具有流固耦合特性的混凝土布料机器人的控制性能得到保证。
15.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
16.附图说明
17.图1是混凝土布料机器人整体结构图(在先申请专利2020111625562《一种三关节回转式混凝土布料机器人》);图2是本发明所设计的混凝土浇筑模糊神经网络控制框架;图3是本发明所设计的模糊神经网络并联pd控制模块;
图4是非单值模糊器隶属函数图。
18.图5是本发明实施例的流程图。
19.图1中1.立柱总成,2.管道总成,3.管卡,4.悬臂支架,5.转台总成。
20.具体实施方式
21.以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
22.首先,将结合图1~4描述根据本发明实施例的基于模糊神经网络的混凝土布料机器人控制方法,用于混凝土的布料控制应用。
23.如图1~4所示,本发明实施例的基于模糊神经网络的混凝土布料机器人控制方法,用于控制三关节回转式混凝土布料机器人的三个回转关节,实现控制三关节回转式混凝土布料机器人的机械臂末端浇筑口的位置,且三关节回转式混凝土布料机器人对三个回转关节的关节角度进行独立控制,均采用电机驱动形式,布料机器人存在两个描述的运动空间,关节空间和笛卡尔空间,关节空间用于描述布料作业中的关节角度变化,笛卡尔空间用于描述布料作业中的末端浇筑口位置变化。基于工业机器人标准d
‑
h建模法和轨迹规划算法,建立三关节混凝土布料机器人运动学模型。含以下步骤:如图2所示,s1:采集目标位置参数信号,生成目标运动轨迹。
24.基于拉格朗日力学方程,建立混凝土布料机器人动力学模型。基于动力学模型,通过三个回转关节的独立电机驱动控制,来控制机械臂末端浇筑口位置,从而保证实际浇筑轨迹按照目标位置参数生成。
25.如图2所示,s2:采集三个回转关节的角度信号。
26.如图2所示,s3:计算三个回转关节的实际角度与目标位置的误差。
27.通过输入目标位置参数信号q1*、q2*、q3*与输出的各关节角度信号q1、q2、q3相减,得三个回转关节实际角度与目标位置的误差计算公式为:;为误差、为目标位置参数信号(q1*、q2*、q3*)、为三个回转关节的角度信号(q1、q2、q3)。
28.如图2所示,s4:将误差通过三个回转关节的模糊控制器计算,得到三个回转关节的转矩。
29.将得到的三个回转关节的转矩输入到混凝土布料机器人动力学模型中,输出关节信号电机驱动转矩,形成闭环控制。
30.如图3~4所示,s5:在模糊控制器中加入神经网络训练,学习模糊控制器的模糊规则。
31.三个独立回转关节的模糊控制器采用fnn模糊神经网络控制器,控制器有两个输入信号,分别是和,输出信号为。模糊神经网络控制器采用了tsk模糊模
型,其中最重要的是推理机部分,推理机由一系列的模糊规则组成,模糊规则采用“if
‑
then”结构,“if”前件为一型模糊集,“then”后件为确定值,并采用神经网络算法在线学习模糊规则。提高系统在动态恶劣施工环境下的稳定性和鲁棒性,解决了模糊控制器中传统的模糊规则编写和制定过多依赖于专家经验导致模糊规则难以实时制定的问题。模糊控制器采用非单值模糊器,非单值模糊器采用三角形隶属函数,将模糊控制器的输入x转化为以其为数学期望的高斯分布函数,与隶属函数联立求解点火水平。
32.以每个输入x的隶属度为中心,非单值模糊器的重要性与其离中心的距离为正相关,离中心越远,其重要性越弱。控制器的点火强度计算公式为:;为点火强度,和分别为模糊控制器的两个输入x的高斯分布函数值。将点火强度归一化得到的值为,模糊神经网络控制器的输出计算公式:;为模糊神经网络控制器的输出、为模糊神经网络控制器的后件参数。
33.如图3所示,s6:在神经网络训练中加入输入补偿控制,将模糊控制器并联pd控制器,pd控制器的输出作为模糊控制器的补偿误差输入。
34.由于人工神经网络需要时间对专家经验数据库进行在线学习,对网络训练过程加入输入补偿控制,在上述模糊神经网络控制器中引入传统的pd控制器,形成所述的pd+fnn并联控制器,pd控制器的输出作为上述控制器的补偿误差输入,以保证神经网络训练可靠性及混凝土浇筑控制系统的实时性与控制质量,可以为前期模糊神经网络的学习过程提供具有实时性的补偿控制,有效保证整体浇筑控制过程的全局稳定性和可靠性,解决了在混凝土布料机器人浇筑控制系统中单独应用模糊神经网络控制器,前期训练过程中难以达到期望的高可靠性控制效果,布料作业存在着安全隐患的问题。
35.以上,参照图1~4描述了根据本发明实施例的基于模糊神经网络的混凝土布料机器人控制方法,具有更低的计算复杂度和更高的控制精度,采用基于启发性的知识及语言决策规则设计的模糊神经网络控制方式,有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。且模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制,使具有流固耦合特性的混凝土布料机器人的控制性能得到保证。
36.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
37.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1