抑制高速飞行器散热片表面温度的弹性控制器设计方法
1.本发明属于高速飞行器技术领域,具体涉及一种抑制高速飞 行器散热片表面温度的弹性控制器设计方法。
背景技术:
2.随着科技的发展,高速飞行器已逐渐成为现实,并在民用航 空、军事等领域发挥着重要作用。由于其较高的速度和机动性优势, 从而得到了广泛的研究。然而,随着飞行器速度的增加,它表面温度 也迅速上升,这可能导致机翼损坏从而带来灾难性的后果。因此,如 何准确地观测和抑制飞行器表面快速上升的温度是需要考虑的问题。 本发明通过设计相应温度控制系统来达到降温的目的。
3.在对飞行器温度控制系统进行建模时,传统的系统建模只考 虑了系统状态和时间的关系,然而,空间特性也是航天系统中一个不 可忽视的因素。近年来,由于偏微分方程(pdes)建模方法的发展,系 统的空间特性也得到了广泛的关注。此外,由偏微分方程建模的复杂 航天系统是非线性的,这给系统的分析带来了很大的困难。
4.此外,在高速飞行器温度控制系统分析过程中,还存在以下 技术问题:其一、在高速飞行器温度控制系统分析过程中,由于测量 误差和随机扰动的影响,并不是所有的测量状态信息都是准确的。因 此,有必要先设计系统观测器以获得准确的状态信息。然而,上述策 略需要大量的传感器和执行器,这将会导致控制成本高、实现过于复 杂;其二、随着网络技术和控制理论的发展,网络控制在飞行器温度 控制系统中也发挥着重要作用。然而,网络控制在带来诸多好处的同 时也带来了一些新的挑战,如恶意的网络攻击。从理论和现实意义上 看,网络攻击会干扰信号传输,从而影响其准确性,甚至可能导致控 制系统的崩溃。此外,考虑到散热片也会由于使用年限的增加而发生 随机故障,这也会导致温度控制系统无法正常工作。并且,由于上述 网络攻击和散热片故障是随机发生的,因此需要用合适的随机分布来 描述它们发生的概率;其三、在航天系统中,系统的响应速率是一个 重要的指标,如何在有限时间区间内达到预期性能是需要考虑的问 题。因此,与渐近稳定或指数稳定相比,有限时间有界是值得探索的。 此外,为了提高所设计控制系统的鲁棒性,一些抗干扰性能指标也是 需要考虑的,如h
∞
性能。
技术实现要素:
5.有鉴于此,本发明提供一种抑制高速飞行器散热片表面温度 的弹性控制器设计方法,本发明结合量化机制、点测量和点控制方法, 设计了基于观测器的模糊控制器,在保证高速飞行器温度控制系统准 确性的同时也降低了系统设计的成本。
6.为了达到上述目的,本发明所采用的技术方案是:抑制高速 飞行器散热片表面温度的弹性控制器设计方法,包括以下步骤:步骤1、基于偏微分方程构建高速飞行器温度控制系统的温度动 力学模型;步骤2、将步骤1建立的温度动力学模型简化为通用的pde模型, 并通过t
‑
s模糊模
型对pde模型进行线性化处理;步骤3、定义采样机制及对数量化器,并基于对数量化器和t
‑
s 模糊规则设计高速飞行器温度控制系统在网络攻击和执行器故障影 响下的状态观测器和控制器;步骤4、通过对高速飞行器温度控制系统进行鲁棒性和稳定性分 析求解状态观测器和控制器的增益矩阵;步骤5、将求解的状态观测器和控制器的增益矩阵带入步骤3的 高速飞行器温度控制系统在网络攻击和执行器故障影响下的状态观 测器和控制器中,完成高速飞行器温度控制系统的状态观测器和控制 器的设计。
7.进一步的,所述步骤1的具体过程为:根据高速飞行器温度控制系统的特性,建立高速飞行器温度控制 系统的温度动力学模型:w
s
+w
gen
=w
s+δs
+w
conv
+w
rad
+w
chg
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中代表热传导的速率;表 示单位体积产生热量的速率;代表热传导的退却的 速率;是导热率;表 示热辐射率;代表热量变化率;是散热片 表面的温度;令则公式(1)可表示为:且相关边界条件如下:
8.进一步的,所述步骤2中,将温度动力学模型简化后形成的 通用的pde模型为:其中x(s,t)代表系统的状态;x
t
(s,t)代表状态对时间的导数;x
s
(s,t) 和x
ss
(s,t)代表状态对空间的导数;表示和系统有关的 非线性函数;表示系数矩阵;u(s,t)是控制输入;y(s,t)是控 制输出;w是系统受到的扰动,
其满足通过t
‑
s模糊模型对pde模型进行线性化处理后得到的t
‑
s模 糊模型为:其中υ(s,t)=[υ1(s,t),υ2(s,t),
…
,υ
m
(s,t)]表示前件变量,为模糊集, i∈{1,2,
…
,r},j∈{1,2,
…
,m}。a
i
为已知的具有适当维数的矩阵,并且满足 h
i
(θ(x,t))≥0和
[0009]
进一步的,所述步骤3中,定义的采样机制及对数量化器为:基于对数量化器和t
‑
s模糊规则设计的高速飞行器温度控制系统 在网络攻击下的状态观测器为:其中l
l
是观测器增益矩阵;c
p
(s)是一个函数,满足:定义系统的估计误差为结合公式(5)和(7)可以得 到如下等式:定义0≤η(t)=t
‑
t
k
≤η
k
=t
k+1
‑
t
k
≤η
m
,η(t)∈[0,η
m
],则设计的控制器为:其中k
pj
是控制器增益矩阵:在网络攻击下对控制器进行重构:
其中是一个代表欺骗攻击的非线性函 数;β(t)是bernoulli分布表示网络攻击发生的可能性;此外,执行器故障服从以下马尔科夫切换模型:其中代表误差矩阵;θ
p
(s,t)表示执 行器故障满足结合公式(5)、(11)和(12),得到受随机网络攻击和执行器 故障影响下的闭环系统为:则高速飞行器温度控制系统在网络攻击和执行器故障影响 下,其观测器和控制器系统可表示为:其中其中其中
[0010]
进一步的,步骤4中,通过李雅普诺夫函数对高速飞行器温 度控制系统进行鲁棒性和稳定性分析,以求解状态观测器和控制器的 增益矩阵。
[0011]
与现有技术相比,本发明的有益效果是:1)本发明结合量化机制、点测量和点控制方法,设计了基于观测 器的模糊控制器,在保证高速飞行器温度控制系统准确性的同时也降 低了系统设计的成本;2)本发明分别用bernoulli和markov分布表示恶意网络攻击和散 热片失效的概率,并在对高速飞行器温度控制系统进行pde建模时 同时考虑网络攻击和散热片故障的影响,使建立的模型普适性更强, 最后设计相应的弹性控制器去抵抗攻击和故障,提高了系统的鲁棒 性;3)在稳定性分析过程中,本发明构造了一些松弛的lkfs去得到 更小保守性的结果;4)本发明放弃了传统的渐近稳定和指数稳定,考虑了有限时间有 界问题,这能提
高控制系统的响应速率,并且添加了性能指标来提高 飞行器温度控制系统的抗干扰能力。
附图说明
[0012]
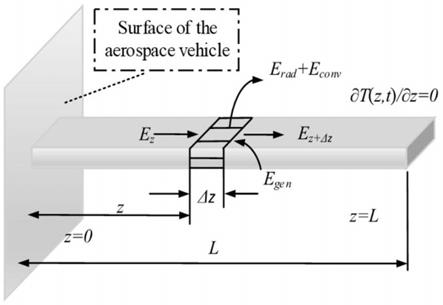
图1是本发明中高速飞行器温度控制系统,具体为飞行器散 热片的结构图;图2是的弹性控制器的设计原理框图。
具体实施方式
[0013]
为使本发明实施例的目的、技术方案和优点更加清楚,下面 将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完 整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全 部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的 范围。
[0014]
本发明提供一种抑制高速飞行器散热片表面温度的弹性控制 器设计方法,其弹性控制器设计的原理框图如图2所示,具体包括以 下步骤:
[0015]
步骤1、高速飞行器温度控制系统建模首先,高速飞行器散热片的结构如图1所示,根据高速飞行器温 度控制系统的特性,其温度动力学模型被建立如下:w
s
+w
gen
=w
s+δs+wconv+wrad+wchg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中代表热传导的速率;表 示单位体积产生热量的速率;代表热传导的退却的 速率;是导热率;表 示热辐射率;代表热量变化率;是散热片 表面的温度;另外一些详细的数值参数在表1中给出。基于表1的参数,设公式 (1)可表示为:并且相关边界条件如下:并且相关边界条件如下:
表1系统参数详细数值
[0016]
步骤2、简化为通用的pde模型为了方便分析,本发明建立如下更为一般的pde模型去描述复 杂的飞行器散热片温度控制系统:其中x(s,t)代表系统的状态;x
t
(s,t)代表状态对时间的导数;x
s
(s,t) 和x
ss
(s,t)代表状态对空间的导数;表示和系统有关的非线 性函数;表示系数矩阵;u(s,t)是控制输入;y(s,t)是控制输 出;w是系统受到的扰动,满足由于应用了点测量和点控制,空间[l1,l2]被分成l个子域,s
p
是第 p个子域,令本发明将采样器和控 制器设在点,其中 z
p
(s)是狄拉克δ函数,
因此,控制器只在处起作用,由此可以实现点控制的目的。非线性项g(x)的存在给系统的分析带来了很大困难,所以本发明 引入了如下的t
‑
s模糊模型去线性化散热片温度控制系统:系统规则i:如果υ1(s,t)是υ2(s,t)是υ
m
(s,t)是那么 有:其中υ(s,t)=[υ1(s,t),υ2(s,t),
…
,υ
m
(s,t)]表示前件变量,为模糊集, i∈{1,2,
…
,r},j∈{1,2,
…
,m}。a
i
为已知的具有适当维数的矩阵,并且满足:此外,由于本发明引入了方便的网络传输,为了减轻通信网络的 传输负担,考虑了以下采样机制和对数量化器:
[0017]
步骤3、
①
观测器设计为了提升飞行器温度测量的准确性,基于上述量化模型和t
‑
s模 糊规则,以下的状态观测器被设计:其中l
l
是观测器增益矩阵;c
p
(s)是一个函数满足:系统的估计误差被定义为结合公式(5)和(7)可以 得到如下等式:
②
控制器设计另外,考虑到网络传输的时滞(τ
k
)是不可避免的:定义0≤η(t)=t
‑
t
k
≤η
k
=t
k+1
‑
t
k
≤η
m
,η(t)∈[0,η
m
],
进而本发明设计了一种异步模糊控制器,其中k
pj
是控制器增 益:然而,由于测量数据是通过网络传输到控制器的,在传输过程中 可能会受到恶意的网络攻击。这将导致控制器接收到的信息不准确, 因此公式(10)设计的控制器需要在网络攻击下进行重构:其中是一个代表欺骗攻击的非线性 函数;β(t)是bernoulli分布表示网络攻击发生的可能性。此外,随着散热片的老化,它也可能会发生随机故障,其服从 以下马尔科夫切换模型:其中代表误差矩阵;θ
p
(s,t)表示执 行器故障满足结合公式(5)、(11)和(12),本发明能够得到受随机网络攻 击和执行器故障影响下的闭环系统:基于以上分析,高速飞行器温度控制系统在网络攻击和执行器 故障影响下,其观测器和控制器系统可表示为:其中其中其中
[0018]
步骤4、稳定性分析
接下来本发明需要对系统进行鲁棒性和稳定性分析:首先构造李雅普诺夫函数:其中,其中,其中,其中,其中,其中,定义弱无穷小算子为:结合公式(15)和(16)可以得到:此外,基于系统(14),如下零等式是成立的:不失一般性,欺骗攻击模型可以表示为:结合公式(15)
‑
(19),可以得到以下不等式:
由此得到满足不等式(20)小于零的条件是:υ(1,1,η
m
,0)<0,应用schur补引理,即:应用schur补引理,即:其中:f(t2)代表t2的特征值,的特征值,σ=col[r s],θ=diag{q,3q},θ=diag{q,3q},υ(ε1,ε2,η
k
,η(t))=υ1(ε1,ε2,η
k
,η(t))+υ2(ε1,ε2,η
k
,η(t))+υ3(ε1,ε2,η
k
,η(t)),,η(t)),,η(t)),,η(t)),
υ
12
=
‑
r
1t
n2r1+r
1t
(n2‑
u2)r5+r
5t
(n2‑
u2)r6+r
5t
(
‑
2n2+u2+u
2t
)r5ꢀ‑
r
6t
(m2+n2)r6+r
1t
u2r6,υ
22
=3ε1η(t)σ
t
s
t
q
‑1sσ+ε1η(t)σ
t
r
t
q
‑1rσ
‑
3sym{(r1+r3‑
2r8)
t
sσ}
ꢀ‑
sym{(r1‑
r3)
t
rσ},σ},σ},σ},由此可以得到:e{lv(t,α(t))}<0,v(t,α(t))是单调递减的,其最 小值在t
k+1
处取得并且大于零,所以v(t,α(t))>0,t∈[t
k
,t
k+1
)。对于构造的lkfs,不难得出:结合上式可得:因此,如果条件(21)和(23)满足,则公式(13)中的闭环系 统在随机的网络攻击和执行器故障下是随机有限时间有界的。此外, 还能得到以不等式:这也保证了系统的h
∞
抗干扰性能。证毕。进一步,通过对公式(21)的矩阵进行解耦之后代入公式(2) 的参数,然后可以用lmi工具箱求解控制器和观测器增益矩阵。
[0019]
步骤5、然后将求解的状态观测器和控制器的增益矩阵带入高 速飞行器温度控制系统在网络攻击和执行器故障影响下的状态观测 器和控制器中,即可完成高速飞行器温度控制系统的状态观测器和控 制器的设计。
[0020]
对所公开的实施例的上述说明,使本领域专业技术人员能够 实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人 员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发 明的精神或范围的情况下,在其它实施例中实现。因此,本
发明将不 会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理 和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1