直线电机系统故障与未知扰动补偿方法
1.本发明涉及精密运动平台鲁棒容错控制领域,特别涉及直线电机系统故障和未知扰动补偿方法,主要包括基于迭代学习观测器的故障和扰动估计器设计,以及鲁棒容错控制器的设计方法。
背景技术:
2.由于直线电机无需皮带、丝杠、涡轮等机械传动装置,其具有高精度、高刚性、快速响应、零间隙等特点。直线电机在包括精密运动平台、数控机床、机器人在内的诸多领域得到了广泛的应用。然而,由于工作环境恶劣、工作时间长等因素,直线电机运动控制系统不可避免地会发生故障,这可能导致控制精度下降,甚至导致系统崩溃。另一方面,直线电机实际工作中也受外部未知干扰的影响,使得其运动控制精度受限。因此,为了提升直线电机运动控制系统的安全性、可靠性,保证运动控制精度,需要设计鲁棒容错控制器以补偿直线电机运动控制系统可能发生的系统故障及未知的外部干扰。
3.现有的容错控制技术通常仅针对于系统故障进行故障估计和容错控制器的设计,且需要假设系统故障信号的导数是有界的。这就导致传统容错控制技术难以应用于带有未知扰动的非线性直线电机运动控制系统中。因此,针对可能的系统故障以及未知外部扰动设计直线电机鲁棒容错控制器具有重要的实际应用价值。
技术实现要素:
4.本发明是为了解决现有直线电机容错控制方法,未考虑控制系统未知外部扰动,导致直线电机运动控制系统运动精度低的问题,现提供直线电机系统故障与未知扰动补偿方法。
5.直线电机系统故障与未知扰动补偿方法,所述方法包括以下步骤:
6.步骤一、建立直线电机运动学模型;
7.步骤二、基于步骤一建立的直线电机运动学模型,得到考虑未知外部扰动和执行器故障的直线电机运动学模型,根据考虑未知外部扰动和执行器故障的直线电机运动学模型,建立直线电机跟踪误差动态系统;
8.步骤三、针对直线电机跟踪误差动态系统和设定的直线电机系统故障和未知外部扰动表达式,构建迭代学习观测器;
9.迭代学习观测器为:
[0010][0011]
式中,中间变量m为运动台的质量,表示速度跟踪误差e
v
(t)的估
计值的一阶导数,k
f
表示放大器增益,u(t)表示控制器输入,k
c
为库伦摩擦系数,k
v
为粘性摩擦系数,v(t)为直线电机的速度,v
r
(t)为需要跟踪的速度信号,h(t)为直线电机系统的非线性,sgn(g)为符号函数,τ为系统采样时间,为速度跟踪误差e
v
(t)的估计值,l
f
、为观测器增益,f(t)为直线电机系统故障和未知外部扰动,为f(t)的估计值;
[0012]
步骤四、设计观测器增益,得到迭代学习观测器中的系统故障信号和未知外部扰动的估计值;
[0013]
步骤五、基于步骤四得到的系统故障信号和未知外部扰动的估计值,设计鲁棒容错控制器。
[0014]
本申请的有益效果为:
[0015]
本申请应用在精密运动控制上,本申请直线电机鲁棒容错控制方法能够在直线电机遭遇系统故障和未知外部扰动的情况下,利用迭代学习观测器对系统故障和未知外部扰动进行估计并据此进行鲁棒容错控制器的设计,使得在系统故障和存在未知外部扰动的情况下直线电机仍能保持其运动精度。直线电机期望位置信号p
r
(t)和一般控制及所提出的鲁棒容错控制器下的位置信号p(t)如图4所示,跟踪误差如图5所示,显然鲁棒容错控制器具有更高的跟踪精度。直线电机期望位置信号p
r
(t)和一般控制及所提出的鲁棒容错控制器下的位置信号p(t)如图6所示,跟踪误差如图7所示,一般控制器的最大跟踪误差为121μm,而鲁棒容错控制器的最大跟踪误差仅为59μm。
[0016]
所提出的迭代学习观测器的直线电机鲁棒容错控制方法不需要对故障信号的一阶导数进行范数有界假设,同一般容错控制方法相比,其适用性更强。
附图说明
[0017]
图1是直线电机控制系统框图;
[0018]
图2是系统故障和未知外部扰动下的直线电机控制系统框图;
[0019]
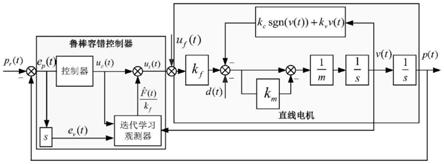
图3是基于迭代学习观测器的直线电机鲁棒容错控制系统框图;
[0020]
图4是直线电机期望位置信号和实际位置信号对比图;
[0021]
图5是鲁棒容错控制器和一般控制器下的位置跟踪误差对比图;
[0022]
图6是直线电机期望位置信号和实际位置信号对比图;
[0023]
图7是鲁棒容错控制器和一般控制器下的位置跟踪误差对比图,附图标记1为鲁棒容错控制器跟踪误差,附图标记2为一般控制器跟踪误差。
具体实施方式
[0024]
具体实施方式一:参照图1至图7具体说明本实施方式,本实施方式所述的直线电机系统故障与未知扰动补偿方法,所述方法包括以下步骤:
[0025]
步骤一、建立直线电机运动学模型;
[0026]
步骤二、基于步骤一建立的直线电机运动学模型,得到考虑未知外部扰动和执行器故障的直线电机运动学模型,根据考虑未知外部扰动和执行器故障的直线电机运动学模型,建立直线电机跟踪误差动态系统;
[0027]
步骤三、针对直线电机跟踪误差动态系统和设定的直线电机系统故障和未知外部
扰动表达式,构建迭代学习观测器;
[0028]
迭代学习观测器为:
[0029][0030]
式中,中间变量m为运动台的质量,表示速度跟踪误差e
v
(t)的估计值的一阶导数,k
f
表示放大器增益,u(t)表示控制器输入,k
c
为库伦摩擦系数,k
v
为粘性摩擦系数,v(t)为直线电机的速度,v
r
(t)为需要跟踪的速度信号,h(t)为直线电机系统的非线性,sgn(g)为符号函数,τ为系统采样时间,为速度跟踪误差e
v
(t)的估计值,l
f
、为观测器增益,f(t)为直线电机系统故障和未知外部扰动,为f(t)的估计值;
[0031]
步骤四、设计观测器增益,得到迭代学习观测器中的系统故障信号和未知外部扰动的估计值;
[0032]
步骤五、基于步骤四得到的系统故障信号和未知外部扰动的估计值,设计鲁棒容错控制器。
[0033]
本实施方式中,图1中的s表示复频率,1/s表示积分环节。
[0034]
具体实施方式二:本实施方式是对具体实施方式一所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤三的具体过程为:
[0035]
根据直线电机跟踪误差动态系统和设定的直线电机系统故障信号和未知外部扰动表达式,设计迭代学习观测器和设定直线电机系统故障信号和未知外部扰动估计误差的表达式;
[0036]
步骤四的具体过程为:
[0037]
步骤四一、根据李雅普诺夫函数、直线电机系统故障信号和未知外部扰动估计误差的表达式、有关直线电机系统故障信号和未知外部扰动估计误差的不等式,得到李雅普诺夫函数不等式;
[0038]
步骤四二、设定李雅普诺夫函数不等式中的观测器增益,根据观测器增益和迭代学习观测器,得到直线电机系统故障信号和未知外部扰动估计误差;
[0039]
步骤四三、根据直线电机系统故障信号和未知外部扰动估计误差,得到直线电机系统故障和未知外部扰动的估计值。
[0040]
本实施方式中,本申请利用迭代学习观测器对系统故障和未知外部扰动进行估计并据此进行鲁棒容错控制器的设计。
[0041]
具体实施方式三:本实施方式是对具体实施方式二所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤一中,直线电机运动学模型,表示为:
[0042]
[0043]
式中,p(t)为直线电机的绝对位置,v(t)为直线电机的速度,和分别表示p(t)和v(t)的一阶导数,g(v)为非线性项,k
m
表示由负载质量引起的增益变化;
[0044]
考虑未知外部扰动和执行器故障的直线电机运动学模型为:
[0045][0046]
式中,u
f
(t)表示执行器偏置故障,d(t)为外部未知扰动。
[0047]
本实施方式中,根据图3所示,本申请根据考虑未知外部扰动和执行器故障的直线电机运动学模型设计迭代学习观测器,以此获得容错控制器。
[0048]
本实施方式中,直线电机控制系统框图如图1所示,在此考虑直线电机模型的非线性,直线电机运动学模型如公式2。考虑未知外部扰动和执行器故障,直线电机控制系统框图如图2所示。
[0049]
具体实施方式四:本实施方式是对具体实施方式三所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤二中,建立直线电机跟踪误差动态系统的过程为:
[0050]
设定位置跟踪误差e
p
(t)和速度跟踪误差e
v
(t)分别为:
[0051][0052]
式中,p
r
(t)为精密运动平台直线电机需要跟踪的位置信号,v
r
(t)为需要跟踪的速度信号;
[0053]
根据公式3和公式4,得到的直线电机跟踪误差动态系统为:
[0054][0055]
式中,和分别表示位置跟踪误差e
p
(t)和速度跟踪误差e
v
(t)的一阶导数。
[0056]
具体实施方式五:本实施方式是对具体实施方式四所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤三中,设定的直线电机系统故障信号和未知外部扰动表达式:
[0057]
f(t)=k
f
u
f
(t)
‑
d(t)
ꢀꢀ
公式6,
[0058]
其中,f(t)为直线电机系统故障和未知外部扰动。
[0059]
具体实施方式六:本实施方式是对具体实施方式五所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤四一中,设定直线电机系统故障信号和未知外部扰动估计误差的表达式为:
[0060]
[0061]
其中,设定设定辅助变量e
τ
(t)为则估计误差表示为:
[0062]
公式7变换为:
[0063][0064]
具体实施方式七:本实施方式是对具体实施方式六所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤四一中,李雅普诺夫函数v(t)为:
[0065][0066]
其中,p>0为正定矩阵;
[0067]
v(t)对时间t求导数,得到:
[0068][0069]
其中,ρ1,ρ2为常值系数,且满足ρ2‑
ρ1=1;
[0070]
将公式8中代入公式10,得到:
[0071][0072]
设定则公式11简化为:
[0073][0074]
具体实施方式八:本实施方式是对具体实施方式七所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤四一中,有关直线电机系统故障信号和未知外部扰动估计误差的不等式:
[0075][0076]
根据公式13,对公式12进行变换,得到李雅普诺夫函数不等式为:
[0077][0078]
其中,ε1=ρ2+ρ3,ρ3为选择的系数。
[0079]
具体实施方式九:本实施方式是对具体实施方式八所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤四二中,设定李雅普诺夫函数不等式中的观测器增益满足:
[0080][0081]
根据公式14和公式15,得到是有界稳定的,从而得到直线电机系统故障和未知外部扰动的估计值
[0082]
具体实施方式十:本实施方式是对具体实施方式九所述的直线电机系统故障与未知扰动补偿方法作进一步说明,本实施方式中,步骤五中,鲁棒容错控制器为:
[0083][0084]
式中,u
t
(t)为容错控制器控制信号,u
c
(t)为名义控制信号。
[0085]
根据本申请的内容进行实验:
[0086]
实验1:
[0087]
精密运动平台直线电机参数如下:
[0088][0089]
假设直线电机未知外部扰动为:
[0090]
d(t)=5cos(0.05πt),t∈[0,50]单位:牛顿
[0091]
系统故障信号为:
[0092]
u
f
(t)=5,t∈[0,50]单位:伏特
[0093]
步骤一、利用模型参数,建立带有系统故障和未知外部扰动的直线电机运动学模型:
[0094][0095]
步骤二、基于步骤一建立的直线电机运动学模型,建立直线电机跟踪误差系统。考虑直线电机位置跟踪信号p
r
(t)如下:
[0096]
p
r
(t)=5
‑
5cos(0.1πt),t∈[0,50]单位:毫米,
[0097]
则速度跟踪信号建立误差动态系统:
[0098][0099]
步骤三、针对误差动态系统,构建迭代学习观测器如下:
[0100][0101]
步骤四、设计迭代学习观测器增益满足:
[0102][0103]
其中,l
f
=0.5,
[0104]
步骤五、基于步骤四中的系统故障信号和未知外部扰动的估计值,设计鲁棒容错控制器。容错控制设计为:
[0105][0106]
将本发明方法的鲁棒容错控制器应用于直线电机位置跟踪中。根据附图4,直线电机能够有效跟踪期望位置信号p
r
(t),且同一般控制器相比,鲁棒容错控制器能够实现更高的跟踪精度。根据附图5,同一般控制器相比,所提出的鲁棒容错控制器的跟踪误差明显更小,最大跟踪误差小于12μm。由此说明,所提出的直线电机鲁棒容错控制方法能够在直线电机遭遇系统故障以及未知外部扰动的情况下,保持较高的运动控制精度。
[0107]
实验2:
[0108]
采用以下实验2验证本发明的有益效果:
[0109]
精密运动平台直线电机参数如下:
[0110][0111]
假设直线电机未知外部扰动为:
[0112]
d(t)=5cos(0.001πt),t∈[0,50]单位:牛顿
[0113]
系统故障信号为:
[0114]
u
f
(t)=5,t∈[0,50]单位:伏特
[0115]
步骤一、利用模型参数,建立带有系统故障和未知外部扰动的直线电机运动学模型:
[0116][0117]
步骤二、基于步骤一建立的直线电机运动学模型,建立直线电机跟踪误差系统。考虑直线电机位置跟踪信号p
r
(t)如下:
[0118][0119]
则速度跟踪信号建立误差动态系统:
[0120][0121]
步骤三、针对误差动态系统,构建迭代学习观测器如下:
[0122][0123]
步骤四、设计迭代学习观测器增益满足:
[0124][0125]
其中,l
f
=10,
[0126]
步骤五、基于步骤四中的系统故障信号和未知外部扰动的估计值,设计鲁棒容错控制器。容错控制设计为:
[0127][0128]
将本申请方法的鲁棒容错控制器应用于直线电机位置跟踪中。根据附图6,直线电机能够有效跟踪期望位置信号p
r
(t),且同一般控制器相比,鲁棒容错控制器能够实现更高的跟踪精度。根据附图7,同一般控制器相比,所提出的鲁棒容错控制器的跟踪误差明显更小,鲁棒容错控制器的最大跟踪误差为59μm,而一般控制器的最大跟踪误差为121μm。由此说明,所提出的直线电机鲁棒容错控制方法能够在直线电机遭遇系统故障以及未知外部扰动的情况下,保持较高的运动控制精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1