一种轮步复合移动平台控制系统及其控制方法
1.本发明属于机器人控制技术领域,具体涉及一种轮步复合移动平台控制系统及其控制方法。
背景技术:
2.一般的车辆在崎岖路面上的通过性不高,而近年发展迅猛的四足机器人自由度多、通过性强,可以弥补车辆的缺点,但由于其步态控制复杂,运行效率低。
3.传统车辆在越野环境下仍不能完美地做到全地形适应;现有的腿足式机器人虽然灵活性高,但是行进效率低、控制难度大,主要应用场景仍停留在示教领域。
4.专利cn201310264334.5公开了一种分布式液压四足机器人控制系统及控制方法,以大、小脑系统为核心。大脑系统通过与环境感知系统、导航信息系统、语音交互系统相连获取数据,大脑系统将获取的数据传递给小脑系统,小脑系统通过第一can总线控制腿部控制系统,小脑系统还通过第二can总线与能源动力控制系统及人际交互面板通信。该控制系统改变了以往四足机器人整体控制的思路,将四足机器人的控制方法分为智能、躯干运动控制以及腿部动力控制三部分。采用分布式结构使其构成一个有机的整体,每个部分处理器在合理的运算量下工作,降低了系统的功耗,大幅提高了控制系统的实时性与可靠性。该技术的应用主体为分布式液压四足机器人,液压系统加工难度高,抗污染能力差,维护不易,成本较高。
5.cn201910726907.9提供了一种陆空两栖无人车控制系统,其包括用于提供目标坐标数据的远程服务系统、用于采集车辆数据的车辆数据采集系统、用于根据目标坐标数据对车辆数据进行处理得到控制指令的控制核心系统、运动控制系统以及电源控制系统。运动控制系统用于根据从控制核心系统接收的控制指令和车辆数据,切换车辆的运动模式,并确定对应的运动模式下的pid控制参数。通过pid控制实现对车辆的旋翼电机和/或底盘电机的控制,使车辆按指定的运动模式运动。运动控制系统通过状态切换结合pid控制的方式,使车辆不仅具备飞行能力和地面移动能力,同时具备飞行运动和地面运动之间的软性切换功能,能够实现车辆在陆空两栖间的连续运动控制。该技术虽然提供了一种陆空两栖无人车的控制系统方案,但是由于目前电机技术条件限制,使得陆空两栖无人车的研发成本高、维护复杂。
技术实现要素:
6.本发明针对一类在腿足式机器人足端安装车轮的轮步复合移动平台提出一种提高平台机动性的控制方案。通过将传统车辆的轮式、腿足式机器人的步式两种行进方式耦合,提高了平台在全路面状况的通过性,能够推动腿足式机器人在其他领域的应用,如狭小空间运输、崎岖地形侦查等领域,尤其是越野路面下,道路崎岖,本发明提供了一种阶梯路面通过方法,即通过轮步复合驱动的方式,发挥平台轮式驱动高效以及足式步态灵活的特长。
7.本发明提供的轮步复合移动平台控制系统及其控制方法,令移动平台在车辆形态的基础上,兼具了对步态的控制功能,通过对运行模式的切换控制,使得平台在不同起伏的越野环境下保持行进的高效性。
8.具体的技术方案为:
9.一种轮步复合移动平台控制系统,包括上位机、下位机;
10.所述的上位机,包括数据采集模块、数据存储模块、行进模式决策模块,功能为通过对环境的感知,收集环境数据,做出决策;
11.所述的下位机,包括运动控制模块,功能为执行上位机的决策,包括轮式驱动控制模块与步式驱动控制模块;
12.上位机与下位机之间通过机器人操作系统进行通信。
13.其中,所述的数据采集模块,包括布置在轮步复合移动平台上的传感器;通过传感器采集环境信息,储存在数据储存模块中;
14.所述的数据储存模块还会存储标定数据,用作轮步复合移动平台行进模式切换决策时的参考;
15.所述的行进模式决策模块接受数据采集模块采集的环境信息后,对环境信息进行处理并选择平台行进模式,并给运动控制模块发出指令;
16.所述的运动控制模块,接受指令控制轮步复合移动平台运动的运动控制模块。
17.优选的,所述的传感器,包括gnss定位元件、机器视觉元件、惯性导航元件、姿态检测元件,采集轮步复合移动平台在工作中产生的环境信息。
18.进一步的,还包括遥控模块;遥控模块以遥控手柄作为平台的输入,通过蓝牙将指令下达至机器人的下位机进行控制。本发明虽然将遥控器的远程控制列入到平台的控制系统中,但如果不考虑实现新功能的开发以及控制算法的验证,移除遥控模块仍可以令轮步复合移动平台自动工作。
19.本发明还提供上述的轮步复合移动平台控制系统,包括以下步骤:
20.数据采集模采集轮步复合移动平台在工作中产生的环境信息,环境信息储存在数据存储模块中;
21.行进模式决策模块收到采集到环境信息后,对路面平坦程度的分类,进行行进模式切换决策:
22.决策完毕,将指令发送到运动控制模块,执行上位机的决策。
23.其中,所述的行进模式切换决策,包括:
24.如果当前路面平坦度低于铺装路面与越野路面分界的阈值,说明此时的路面可以认为是铺装路面,选择驱动效率高、控制简单的轮式驱动;
25.如果高于阈值,表明此时的路面不平坦,选择通过性强的步式驱动;
26.如果数据采集模块采集到的路面信息可以归纳为阶梯路面,则选择轮步复合驱动,让轮步复合移动平台的底盘适应阶梯高度的前提下,通过车轮滚动带动轮步复合移动平台前进。
27.本发明的轮步复合移动平台的行进模式决策规则,通过将路面划分为铺装路面、越野路面以及阶梯路面,令平台在相应的路面下采取特定的行进模式,充分发挥轮步式复合移动平台的特点,既可以高效率地通过平坦的铺装路面,又可以灵活地跨过越野、阶梯路
面。
28.运动控制模块的两个控制模块即轮式驱动控制模块、步式驱动控制模块的耦合控制方式,具体体现为通过机器人操作系统(ros)对两套控制系统进行集中管理,在上位机下达平台期望速度后,两个控制模块既可以单独控制电机,使平台达到期望速度,也可以协同控制,令平台以轮步复合行进模式达到期望速度。
29.本发明与现有技术相比,具有的技术效果有:
30.1、使平台在感知到道路信息后,对行进模式进行决策、切换。
31.2、在大多数情况下使用车辆模式行进,降低了移动平台的控制难度与能耗。
32.3、采用轮步复合移动方式,可以充分发挥轮步式复合移动平台高通过性的特点,高效率地通过阶梯形态的路面。
附图说明
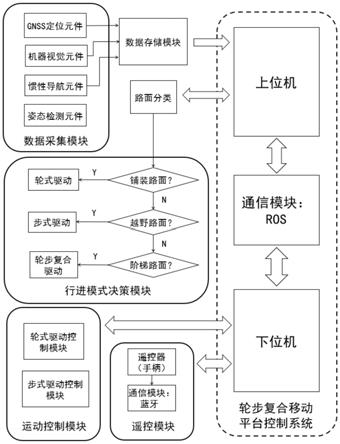
33.图1为本发明的轮步复合移动平台控制系统控制框架;
34.图2为本发明的轮步复合移动平台控制模块结构图;
35.图3为本发明的轮步复合移动平台信息流;
36.图4为本发明的轮步复合移动平台控制系统流程图;
37.图5为实施例的轮步复合移动平台跨越阶梯障碍过程。
具体实施方式
38.结合实施例说明本发明的具体技术方案。
39.本发明提供的轮步复合移动平台控制系统,主要用于控制轮步复合移动平台在全工况路面(铺装路面、越野路面、阶梯路面)高效行进。轮步复合移动平台控制系统控制框架如图1所示,其中箭头表示了平台内部的信息流。
40.图2展示了轮步复合移动平台控制系统的模块结构图,包括上位机、下位机;
41.所述的上位机,包括数据采集模块、数据存储模块、行进模式决策模块,功能为通过对环境的感知,收集环境数据,做出决策;
42.所述的下位机,包括运动控制模块,功能为执行上位机的决策,包括轮式驱动控制模块与步式驱动控制模块;
43.上位机与下位机之间通过机器人操作系统(robot opreating system,ros)进行通信。可以使用其他单片机来达到相同的效果。
44.所述的数据采集模块,包括布置在轮步复合移动平台上的传感器;通过传感器采集环境信息,储存在数据储存模块中;
45.所述的数据储存模块还会存储标定数据,用作轮步复合移动平台行进模式切换决策时的参考;
46.所述的行进模式决策模块接受数据采集模块采集的环境信息后,对环境信息进行处理并选择平台行进模式,并给运动控制模块发出指令;
47.所述的运动控制模块,接受指令控制轮步复合移动平台运动的运动控制模块,将传统车辆的轮式、机器人的足式两种行进方式进行了耦合。
48.数据采集模块包括的传感器,如gnss定位元件、机器视觉元件、惯性导航元件、姿
态检测元件,它们负责采集平台在工作中产生的各种数据,比如平台位置数据、平台姿态数据、平台加速度数据、环境信息数据等。
49.数据储存模块存储的标定数据,比如环境信息数据中路面平坦度的阈值信息,用作平台行进模式切换决策时的参考。
50.另外,轮步复合移动平台也支持遥控操作,便于平台进行新功能开发、控制方法验证。遥控模块以遥控手柄作为平台的输入,通过蓝牙将指令下达至机器人的下位机进行控制。
51.图3展示了轮步复合移动平台的信息流。当环境信息的数据经过采集、存储,并由上位机决策出行进模式后,控制指令通过上位机或者遥控器传输至下位机,生成平台期望速度。具体的上述的轮步复合移动平台控制系统的控制方法,包括以下步骤:
52.数据采集模采集轮步复合移动平台在工作中产生的环境信息,环境信息储存在数据存储模块中;
53.行进模式决策模块收到采集到环境信息后,对路面平坦程度的分类,进行行进模式切换决策:
54.如果当前路面平坦度低于铺装路面与越野路面分界的阈值,说明此时的路面可以认为是铺装路面,选择驱动效率高、控制简单的轮式驱动;
55.如果高于阈值,表明此时的路面不平坦,选择通过性强的步式驱动;
56.如果数据采集模块采集到的路面信息可以归纳为阶梯路面,则选择轮步复合驱动,让轮步复合移动平台的底盘适应阶梯高度的前提下,通过车轮滚动带动轮步复合移动平台前进,可以提高平台的通过效率;
57.决策完毕,将指令发送到运动控制模块,执行上位机的决策。
58.在轮式驱动控制模块中,采用pid控制器实现对车轮转速的控制,使车辆快速、稳定地跟踪期望速度;在步式驱动控制模块中,由于平台自由度增加,控制难度加大,采用零力矩点(zero moment point,zmp)方法进行动态规划,使平台的重心在行进过程中始终在足端构成的支撑多边形内,以确保平台的稳定性。足端轨迹规划器负责规划平台足端的运动路线,本发明中采取复合摆线轨迹,经过良好设计的复合摆线,可以令腿足式机器人行进时具有较高的平顺性,关节在摆动、支撑时都没有较大的冲击;腿部摆动时足端轨迹圆滑,且没有拖地的现象,便于越过障碍。通过关节pid控制器控制关节电机,使足端能够平稳、协调、无冲击地交替运动。在步式驱动控制模块中,通过关节电机的位置、扭矩传感器反馈值形成闭环控制系统,以增强系统的鲁棒性。
59.本实施例的控制指令通过pid控制器实现,也可以采用其他控制算法进行电机的控制,比如模糊算法、自适应算法、神经网络算法等。
60.图4展示了轮步复合移动平台控制系统流程图。具体控制过程描述如下:首先,启动轮步复合移动平台控制系统,包括系统的上位机、下位机,对系统进行初始化设置。其次,进行控制模式的判断,如果下位机在初始化后接收到遥控指令,则启动手动控制模式,否则启动自动控制模式。在自动控制模式下,通过5ms定时中断,使用velodyne vlp
‑
16三维激光雷达、stonkam fhd
‑
228n摄像头采集环境信息,并在车载电脑中进行路面分类。根据路面分类信息,每200ms进行一次行进模式决策。另外,通过每10ms的定时中断,使用gw
‑
nav100 b gnss+惯性元件采集平台位置、姿态信息,用于步式驱动控制模块的控制。
61.在平台上使用的数据采集元件型号不作局限,既可以选用其他型号,也可以使用自研产品。
62.本实施例中,现有环境如图5(a)所示,在较为崎岖的砾石路面上有一阶梯障碍,轮步复合移动平台可以使用车辆模式在砾石路面上前进。对于普通车辆,在探测到阶梯障碍后,只能选择绕行,如图5(a)黄色箭头路径所示,然而在使用本实施例的平台控制系统后,对于阶梯障碍,平台会切换到轮步复合驱动行进模式,如图5(b),接着通过车轮电机与关节电机的协同动作,实现跨越阶梯障碍的效果,如图5(c)。具体执行流程为:平台行驶时,视觉采集模块使用机器视觉元件采集路面信息,将数据暂存至数据存储单元,随后将数据发送至平台控制系统的上位机中进行路面分类。上位机将砾石路分类为铺装路面,因此采用轮式驱动模式;探测到阶梯障碍的路面信息后,上位机判断路面改变为阶梯路面,切换至轮步复合驱动模式,关节电机初始化至一定角度,zmp动态规划算法开始运行,关节电机pid控制器控制关节电机跟踪规划出的足端轨迹,同时车轮电机由另一套车轮电机速度pid控制器控制,以辅助平台达到期望速度,通过阶梯障碍。该实例反映了轮步复合移动平台控制系统可以在狭小空间下赋予平台高通过性,实现普通车辆无法实现的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1