一种用于侦引打评的无人机装置的制作方法
1.本发明涉及无人机技术领域,尤其涉及一种用于侦引打评的无人机装置。。
背景技术:
2.随着科学技术的发展,无人机技术被广泛应用于军事侦察、医疗救援、航拍等技术领域,为人们的生活带来了极大的方便,然而,现有的大多数无人机技术不能实现侦察、控制与打击等的集中统一。
3.因此,提供一种新的技术方案改善上述问题,是本领域技术人员急需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供一种用于侦引打评的无人机装置,以解决上述技术问题。
5.为实现上述目的,本发明提供如下技术方案:
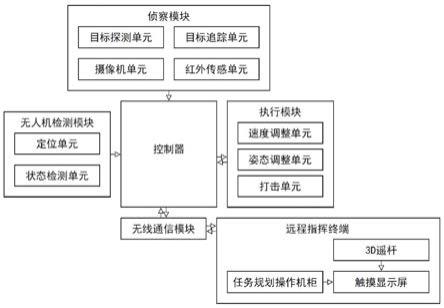
6.一种用于侦引打评的无人机装置,包括侦察模块、无人机检测模块、控制器、执行模块、无线通信模块和远程指挥终端。
7.在上述的方案中,所述侦察模块用于对指定区域内的目标进行跟踪侦察,并将侦察信号发送至所述控制器。
8.在上述的方案中,所述无人机检测模块用于获取无人机工作过程中的数据信息,并将数据信息发送至所述控制器。
9.在上述的方案中,所述侦察模块、所述无人机检测模块和所述执行模块均与所述控制器相连接,所述控制器接收侦察模块和所述无人机检测模块发送的信息,并进行处理后控制所述执行模块进行工作。
10.在上述的方案中,所述控制器通过所述无线通信模块与所述远程指挥终端相互通信,所述控制器接收所述远程指挥终端发送的指令信息,并发送反馈信号至所述远程指挥终端。
11.在上述的方案中,所述侦察模块包括目标探测单元、目标追踪单元、摄像机单元和红外传感单元,所述目标探测单元采用至少一个电磁波雷达获取探测目标信息,所述目标追踪单元采用光电跟踪设备对侦察目标进行辨别与跟踪,所述摄像机单元采用日夜两用摄像头采集侦察过程中的视频数据信息,所述红外传感单元采用红外传感器检测无人机在侦察过程中前方是否存在障碍物。
12.在上述的方案中,所述无人机检测模块包括定位单元,所述定位单元包括gps定位器、距离传感器和抗干扰器,所述gps定位器用于获取无人机所在的经纬数据,所述距离传感器安装于无人机底部,用于检测无人机与地面的距离,所述gps定位器和所述距离传感器均与所述抗干扰器相连接,所述抗干扰器用于对所述gps定位器和距离传感器获取的信号进行滤波处理。
13.在上述的方案中,所述无人机检测模块还包括状态检测单元,所述状态检测单元包括速度传感器、加速度传感器和姿态传感器,所述速度传感器用于获取无人机飞行的速
度数据,所述加速度传感器用于获取无人机飞行的加速度数据,所述姿态传感器用于获取无人机的航姿数据。
14.在上述的方案中,所述控制器包括包数据存储单元、数据比较单元和视频处理单元,所述数据存储单元用于对所述侦察模块、所述无人机检测模块和所述远程指挥终端发送的数据信息进行存储,所述数据比较单元和所述视频处理单元均与所述数据存储单元相连接,所述数据比较单元用与对所述数据存储单元存储的所述无人机检测模块检测的数据信息和所述远程指挥终端发送的指令数据信息进行比较;所述视频处理单元用于对所述数据存储单元存储的所述侦察模块发送的视频数据信息进行处理。
15.在上述的方案中,所述视频处理单元包括视频稳定模块和清晰化模块,所述视频稳定模块包括框选单元、块运动估计单元、全局运动估计单元和运动校正单元,所述框选单元用于在所述数据存储单元存储视频的第一帧上框选跟踪目标范围,所述块运动估计单元与所述框选单元相连接,所述块运动估计单元用于通过块运动估计算法对框选的跟踪目标范围进行块运动估计,所述全局运动估计单元与所述块运动估计单元相连接,所述全局运动估计单元用于将经过所述块运动估计单元处理后的局部运动矢量拓展为全局运动矢量,所述运动校正单元与所述全局运动估计单元相连接,所述运动校正单元用于通过所述全局运动矢量对原始视频进行运动校正;所述清晰化模块与所述视频稳定模块相连接,所述清晰化模块用于对所述视频稳定模块处理后的视频图像进行清晰化处理,所述清晰化模块包括滤波处理单元、平滑处理单元、增益处理单元和融合处理单元,所述滤波处理单元用于通过高斯滤波对所述视频稳定模块输出的图像帧进行滤波处理,所述平滑处理单元与所述滤波处理单元相连接,所述平滑处理单元用于通过双边平滑算法对经过所述平滑处理单元处理后的图像帧进行平滑处理;所述增益处理单元与所述平滑处理单元相连接,所述增益处理单元用于通过邻域平均算法对所述平滑处理单元处理后图像帧进行增益操作,所述融合处理单元与所述增益处理单元相连接,所述融合处理单元用于将所述平滑处理单元和所述增益处理单元处理后图像相进行融合。
16.在上述的方案中,所述视频处理单元还包括目标检测模块和目标跟踪模块,所述目标检测模块与所述清晰化模块相连接,所述目标检测模块包括特征提取单元、图像描述符建立单元和匹配单元,所述特征提取单元用于通过orb算法提取经过所述清晰化模块处理后的图像帧中的特征点,所述图像描述符建立单元与特征提取单元相连接,所述图像描述符建立单元用于通过局部差异二进制描述算法来构建图像描述符,所述匹配单元与所述图像描述符建立单元相连接,所述匹配单元用于通过最临近算法对所述图像描述符和目标模板描述符进行匹配;所述目标跟踪模块与所述目标检测模块相连接,所述目标跟踪模块用于通过ydsst算法为所述目标检测模块获取的目标建立对应的单目标跟踪器,并确定目标在图像中的位置信息。
17.在上述的方案中,所述执行模块包括速度调整单元、姿态调整单元和打击单元,所述速度调整单元包括舵机和发动机,所述速度调整单元用于调节无人机飞行速度和加速度;所述姿态调整单元包括无刷电机,所述姿态调整单元用于驱动无人机飞行姿态的调整;所述打击单元包括导弹发射器和声波发生器,所述打击单元用于发射导弹至打击目标。
18.在上述的方案中,所述远程指挥终端包括3d遥杆、任务规划操作机柜和触摸显示屏,所述3d遥杆和所述任务规划操作机柜均与所述触摸显示屏相连接,所述3d遥杆用于用
户远程控制无人机飞行的路径和方向,所述任务规划操作机柜用于分配无人机的操作任务,所述触摸显示屏用于用户获取无人机的状态信息和动作信息。
19.一种用于侦引打评的方法,其特征在于,包括:
20.远程指挥终端下达任务指令,母机向预定空域执行飞行任务;
21.母机到达目标空域,盘旋搜索,抛洒子机;
22.子机蜂群在空中实施侦察任务;
23.子母机之间以蜂群数据链协同通信,将目标信息回传母机;
24.母机收集子机目标信息,通过中继传回远程指挥终端;
25.远程指挥终端判别目标,向执行模块下发目标信息;
26.母机接收到执行模块的目标信息,指定某台子机下达引导指令;
27.子机引导远程火力实施精确打击;
28.子母系统实施火力毁伤评估并回传。
29.综上所述,本发明的有益效果是:通过侦察模块和无人机检测模块获取无人机的数据信息和侦察数据信息,并通过远程指挥终端远程根据无人机的数据信息和侦察数据信息控制无人机的飞行姿态、飞行速度和控制无人机打击目标等,同时,采用远程指挥终端分配任务,并评估任务完成情况,实现了无人机侦引打评的集中统一。
附图说明
30.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
31.图1为本发明中用于侦引打评的无人机装置的组成示意图。
32.图2为本发明中控制器的组成示意图。
33.图3为本发明中视频处理单元的组成示意图。
34.图4为本发明中视频稳定模块的组成示意图。
35.图5为本发明中清晰化模块的组成示意图。
36.图6为本发明中目标检测模块的组成示意图。
37.图7为本发明中用于侦引打评的方法的步骤图。
38.图8为本发明一实施例的作战链路图。
具体实施方式
39.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本发明做进一步详细说明。在此,本发明的示意性实施方式及其说明用于解释本发明,但并不作为对本发明的限定。
40.如图1所示,本发明的一种用于侦引打评的无人机装置,包括侦察模块、无人机检测模块、控制器、执行模块、无线通信模块和远程指挥终端。
41.下面结合附图对本发明上述各模块间的连接关系做进一步详细说明。
42.所述侦察模块用于对指定区域内的目标进行跟踪侦察,并将侦察信号发送至所述控制器;所述无人机检测模块用于获取无人机工作过程中的数据信息,并将数据信息发送至所述控制器;所述侦察模块、所述无人机检测模块和所述执行模块均与所述控制器相连
接,所述控制器接收侦察模块和所述无人机检测模块发送的信息,并进行处理后控制所述执行模块进行工作;所述控制器通过所述无线通信模块与所述远程指挥终端相互通信,所述控制器接收所述远程指挥终端发送的指令信息,并发送反馈信号至所述远程指挥终端。
43.在本实施例中,所述无线通信模块包括lora无线通信单元。
44.进一步地,所述侦察模块包括目标探测单元、目标追踪单元、摄像机单元和红外传感单元,所述目标探测单元采用至少一个电磁波雷达获取探测目标信息,所述目标追踪单元采用光电跟踪设备对侦察目标进行辨别与跟踪,所述摄像机单元采用日夜两用摄像头采集侦察过程中的视频数据信息,所述红外传感单元采用红外传感器检测无人机在侦察过程中前方是否存在障碍物,在探测得到前方有除非侦察目标外的其他物体存在时,发送信号至控制器,控制器控制无人机改变飞行的轨迹避免碰撞到物体。
45.在本实施例中,所述目标探测单元检测目标位置或位置变化信息,并通过电磁波传输给控制器,控制器对目标位置或位置变化信息进行处理后将信号发送至目标追踪单元,便于目标追踪单元对目标进行探测和跟踪。
46.进一步地,所述无人机检测模块包括定位单元,所述定位单元包括gps定位器、距离传感器和抗干扰器,所述gps定位器用于获取无人机所在的经纬数据,所述距离传感器安装于无人机底部,用于检测无人机与地面的距离,所述gps定位器和所述距离传感器均与所述抗干扰器相连接,所述抗干扰器用于对所述gps定位器和距离传感器获取的信号进行滤波处理,从而提高无人机位置信息的精确性。
47.进一步地,所述无人机检测模块还包括状态检测单元,所述状态检测单元包括速度传感器、加速度传感器和姿态传感器,所述速度传感器用于获取无人机飞行的速度数据,所述加速度传感器用于获取无人机飞行的加速度数据,所述姿态传感器用于获取无人机的航姿数据。
48.在本实施例中,所述姿态传感器包括陀螺仪和加速计,所述姿态传感器将获取飞行姿态信息发送至控制器,控制器对飞行姿态信息进行dmp解算后得到相对于大地坐标系的无人机机身姿态角数据,所述姿态角数据包括方位角和俯仰角数据。
49.如图2所示,所述控制器包括包数据存储单元、数据比较单元和视频处理单元,所述数据存储单元用于对所述侦察模块、所述无人机检测模块和所述远程指挥终端发送的数据信息进行存储,所述数据比较单元和所述视频处理单元均与所述数据存储单元相连接,所述数据比较单元用与对所述数据存储单元存储的所述无人机检测模块检测的数据信息和所述远程指挥终端发送的指令数据信息进行比较;所述视频处理单元用于对所述数据存储单元存储的所述侦察模块发送的视频数据信息进行处理。
50.如图3至图5所示,所述视频处理单元包括视频稳定模块和清晰化模块,所述视频稳定模块包括框选单元、块运动估计单元、全局运动估计单元和运动校正单元,所述框选单元用于在所述数据存储单元存储视频的第一帧上框选跟踪目标范围,所述块运动估计单元与所述框选单元相连接,所述块运动估计单元用于通过块运动估计算法对框选的跟踪目标范围进行块运动估计,所述全局运动估计单元与所述块运动估计单元相连接,所述全局运动估计单元用于将经过所述块运动估计单元处理后的局部运动矢量拓展为全局运动矢量,所述运动校正单元与所述全局运动估计单元相连接,所述运动校正单元用于通过所述全局运动矢量对原始视频进行运动校正;所述清晰化模块与所述视频稳定模块相连接,所述清
晰化模块用于对所述视频稳定模块处理后的视频图像进行清晰化处理,所述清晰化模块包括滤波处理单元、平滑处理单元、增益处理单元和融合处理单元,所述滤波处理单元用于通过高斯滤波对所述视频稳定模块输出的图像帧进行滤波处理,所述平滑处理单元与所述滤波处理单元相连接,所述平滑处理单元用于通过双边平滑算法对经过所述平滑处理单元处理后的图像帧进行平滑处理;所述增益处理单元与所述平滑处理单元相连接,所述增益处理单元用于通过邻域平均算法对所述平滑处理单元处理后图像帧进行增益操作,所述融合处理单元与所述增益处理单元相连接,所述融合处理单元用于将所述平滑处理单元和所述增益处理单元处理后图像相进行融合。
51.如图6所示,所述视频处理单元还包括目标检测模块和目标跟踪模块,所述目标检测模块与所述清晰化模块相连接,所述目标检测模块包括特征提取单元、图像描述符建立单元和匹配单元,所述特征提取单元用于通过orb算法提取经过所述清晰化模块处理后的图像帧中的特征点,所述图像描述符建立单元与特征提取单元相连接,所述图像描述符建立单元用于通过局部差异二进制描述算法来构建图像描述符,所述匹配单元与所述图像描述符建立单元相连接,所述匹配单元用于通过最临近算法对所述图像描述符和目标模板描述符进行匹配;所述目标跟踪模块与所述目标检测模块相连接,所述目标跟踪模块用于通过ydsst算法为所述目标检测模块获取的目标建立对应的单目标跟踪器,并确定目标在图像中的位置信息。
52.在本实施例中,所述控制器通过获取所述光电跟踪设备和摄像机单元发送的信息,可实现对目标的自动跟踪,所述控制器将目标在图像中的位置信息发送至所述远程指挥终端,同时,所述远程指挥终端在远程控制无人机飞行的路径和方向时,目标在图像中的位置信息发生改变。
53.在本实施例中,所述控制器包括包括mcu芯片和dsp芯片,所述mcu芯片和所述dsp芯片接收所述侦察模块和所述无人机检测模块的数据,并进行处理后得到执行控制信号。
54.进一步地,所述执行模块包括速度调整单元、姿态调整单元和打击单元,所述速度调整单元包括舵机和发动机,所述速度调整单元用于调节无人机飞行速度和加速度;所述姿态调整单元包括无刷电机,所述姿态调整单元用于驱动无人机飞行姿态的调整;所述打击单元包括导弹发射器和声波发生器,所述打击单元用于发射导弹至打击目标。
55.在本实施例中,所述控制器接收所述远程指挥终端发送的速度调整指令信息,并采用pid算法控制舵机和发动机的转动速度,从而控制无人机飞行速度和加速度,同时,所述控制器根据侦察无人机与侦察目标之间与距离调整无人机飞行速度和加速度,使得无人机与侦察目标保持一定的距离。
56.在本实施例中,所述控制器根据侦察目标的目标位置或位置变化信息以及前方是否有障碍物来调整无人机的上升、垂降、俯冲和旋转等。
57.在本实施例中,所述声波发生器包括声波接收器和声波发射器,声波发射器发射不可闻波至声波接收器,所述声波接收器安装在导弹上,以此来避免暴露。
58.进一步地,所述远程指挥终端包括3d遥杆、任务规划操作机柜和触摸显示屏,所述3d遥杆和所述任务规划操作机柜均与所述触摸显示屏相连接,所述3d遥杆用于用户远程控制无人机飞行的路径和方向,所述任务规划操作机柜用于分配无人机的操作任务,所述触摸显示屏用于用户获取无人机的状态信息和动作信息。
59.在本实施例中,所述任务规划操作机柜用于分配无人机的侦察或打击任务,所述控制器接收任务规划操作机柜分配的任务,控制侦察和打击工作,并在任务完成或任务时间接收后对任务完成情况进行评估,并将评估结果发送至所述触摸显示屏。
60.如图7所示,本发明还包括一种用于侦引打评的方法,包括以下步骤:
61.步骤s1:远程指挥终端下达任务指令,母机向预定空域执行飞行任务;
62.步骤s2:母机到达目标空域,盘旋搜索,抛洒子机;
63.步骤s3:子机蜂群在空中实施侦察任务;
64.步骤s4:子母机之间以蜂群数据链协同通信,将目标信息回传母机;
65.步骤s5:母机收集子机目标信息,通过中继传回远程指挥终端;
66.步骤s6:远程指挥终端判别目标,向执行模块下发目标信息;
67.步骤s7:母机接收到执行模块的目标信息,指定某台子机下达引导指令;
68.步骤s8:子机引导远程火力实施精确打击;
69.步骤s9:子母系统实施火力毁伤评估并回传。
70.如图8所示,本发明还可包括侦引打评的作战链路图,可实现多个无人机协同打击目标。
71.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1