路线决定系统、路线决定方法及路线决定程序与流程
1.本发明涉及路线决定系统、路线决定方法及路线决定程序。
背景技术:
2.德国专利申请公开第102016009572号说明书公开了在车辆的内部搭载多个配送机器人且进行物品的配送的系统。德国专利申请公开第102016009572号说明书所记载的车辆能够使用多个配送机器人来向多个配送目的地配送物品。
技术实现要素:
3.在此,在不适合于配送机器人的行驶的天气的情况下,可能会对配送机器人或该配送机器人运送的物品施加物理的损伤。
4.本发明实现在不适合于配送机器人的行驶的天气下能够降低该配送机器人的行驶距离的运送路线的决定方法。
5.本发明的路线决定系统从多个候补决定物品的运送路线,其中,
6.所述运送路线包含利用第一自主移动体来运送所述物品的第一运送区间和利用比所述第一自主移动体小型的第二自主移动体来运送所述物品的第二运送区间,
7.所述第二自主移动体在所述第一运送区间中搭载于所述第一自主移动体,
8.所述路线决定系统具备:
9.判定部,基于所述运送路线上的天气信息来判定是否是适合于所述第二自主移动体的行驶的天气;及
10.决定部,在判定为不是适合于所述第二自主移动体的行驶的天气的情况下,以使所述第二运送区间的长度变短的方式从所述多个候补决定所述运送路线。
11.本发明的路线决定方法从多个候补决定物品的运送路线,其中,
12.所述运送路线包含利用第一自主移动体来运送所述物品的第一运送区间和利用比所述第一自主移动体小型的第二自主移动体来运送所述物品的第二运送区间,
13.所述第二自主移动体在所述第一运送区间中搭载于所述第一自主移动体,
14.所述路线决定方法包括:
15.判定步骤,基于所述运送路线上的天气信息来判定是否是适合于所述第二自主移动体的行驶的天气;及
16.决定步骤,在判定为不是适合于所述第二自主移动体的行驶的天气的情况下,以使所述第二运送区间的长度变短的方式从所述多个候补决定运送路线。
17.本发明的路线决定程序从多个候补决定物品的运送路线,其中,
18.所述运送路线包含利用第一自主移动体来运送所述物品的第一运送区间和利用比所述第一自主移动体小型的第二自主移动体来运送所述物品的第二运送区间,
19.所述第二自主移动体在所述第一运送区间中搭载于所述第一自主移动体,
20.所述路线决定程序使计算机执行:
21.判定步骤,基于所述运送路线上的天气信息来判定是否是适合于所述第二自主移动体的行驶的天气;及
22.决定步骤,在判定为不是适合于所述第二自主移动体的行驶的天气的情况下,以使所述第二运送区间的长度变短的方式从所述多个候补决定所述运送路线。
23.通过本发明,在不适合于配送机器人的行驶的天气下,能够降低该配送机器人的行驶距离。
24.本公开的上述和其他的目的、特征及优点将会通过下文给出的详细描述和仅以图解的方式给出的附图而被更充分地理解,因此不应被认为限制本公开。
附图说明
25.图1是示出实施方式1的路线决定系统的概要的概略图。
26.图2是示出实施方式1的路线决定系统的结构的结构图。
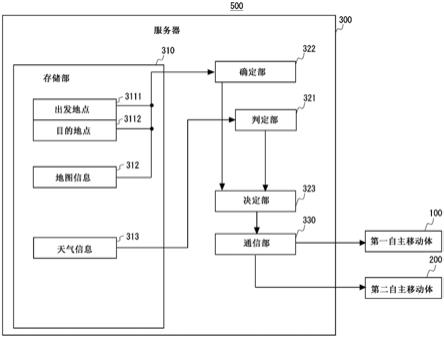
27.图3是示出实施方式1的服务器的结构的框图。
28.图4是示出实施方式1的路线决定系统的动作的流程图。
29.图5是例示配送区域的概略图。
30.图6是例示实施方式1的路线决定系统所确定的运送路线的候补的图。
31.图7是示出实施方式2的路线决定系统的概要的概略图。
32.图8是示出实施方式2的服务器的结构的结构图。
33.图9是示出实施方式2的路线决定系统所确定的运送路线的候补的概略图。
34.图10是示出实施方式2的路线决定系统所确定的运送路线的候补的概略图。
具体实施方式
35.(实施方式1)
36.以下,参照附图来对本发明的实施方式进行说明。图1是示出实施方式1的路线决定系统500的概要的概略图。路线决定系统500决定将物品从出发地点x运送至目的地点z的运送路线。
37.在此,运送路线包含利用第一自主移动体100来运送物品的第一运送区间p1和利用第二自主移动体200来运送物品的第二运送区间p2。第一运送区间p1是从出发地点x到中间地点y为止的区间。第二运送区间p2是从中间地点y到目的地点z为止的区间。在中间地点y处,进行从第一自主移动体100向第二自主移动体200的物品的倒装。中间地点可以是第一自主移动体100能够停车的停车场等。
38.在图1中示出了包含区间p1a及区间p2a的运送路线的候补r1和包含区间p1b及区间p2b的运送路线的候补r2。候补r1中的中间地点是中间地点y1,候补r2中的中间地点是中间地点y2。在图中,将第一运送区间利用实线示出,将第二运送区间利用虚线示出。
39.另外,第二自主移动体200是比第一自主移动体100小型的自主移动体,在第一运送区间p1中搭载于第一自主移动体100。例如,第二自主移动体200是配送机器人,第一自主移动体100是能够搭载配送机器人而行驶的自动驾驶车辆。第二自主移动体200从第一自主移动体100的停止位置(中间地点)开始物品的运送。
40.在此,在运送路线上的天气是雨的情况下,第二自主移动体200运送的物品可能会
润湿。另外,在运送路线上的天气是雪的情况下,可能会在第二自主移动体200运送的物品上积雪。
41.另外,第二自主移动体200有时与更大型的第一自主移动体100相比传感器等的功能逊色。在这样的情况下,第二自主移动体200可能会在雨、雪等天气下无法识别本装置的当前位置,无法自主移动。路线决定系统500以使不适合于第二自主移动体200的行驶的雨、雪等天气下的第二自主移动体的行驶距离变短的方式决定运送路线。
42.接着,使用图2来对路线决定系统500的结构进行说明。路线决定系统500具备第一自主移动体100、第二自主移动体200及服务器300。第一自主移动体100、第二自主移动体200及服务器300经由网络400而连接。在此,网络400是互联网、内联网、便携电话网、lan(local area network:局域网)等通信线路网。
43.服务器300决定物品的运送路线。并且,服务器300将决定出的运送路线中的与第一运送区间p1对应的部分向第一自主移动体100发送,将与第二运送区间p2对应的部分向第二自主移动体200发送。
44.第一自主移动体100具备传感器110、通信部120及行驶控制部130。传感器110收集第一自主移动体100的周边的环境数据,并向行驶控制部130输出。传感器110例如是相机、雷达、lidar等。通信部120是用于与网络400进行无线通信的通信接口。通信部120经由网络400而接收服务器300决定出的运送路线。
45.行驶控制部130使用传感器110收集到的环境数据来使第一自主移动体100沿着运送路线自主移动。在此,第一自主移动体100通过gps(global positioning system:全球定位系统)、传感器110等来取得本装置的位置。
46.第二自主移动体具备传感器210、通信部220及行驶控制部230。传感器210具有与传感器110同样的功能,通信部220具有与通信部120同样的功能,行驶控制部230具有与行驶控制部130同样的功能。
47.接着,使用图3来对服务器300进行详细说明。服务器300决定使用第一自主移动体100及第二自主移动体200来运送物品的运送路线。服务器300具备存储部310、判定部321、确定部322、决定部323及通信部330。
48.存储部310是硬盘、快闪存储器等存储装置。另外,存储部310也可以包含用于暂时性地保持信息的存储区域即ram(random access memory:随机存取存储器)等易失性存储装置。通信部330是与网络400的通信接口。
49.存储部310存储出发地点3111、目的地点3112及地图信息312。存储部310将物品的运送中的出发地点3111和目的地点3112建立对应并存储。
50.地图信息312是包含配送区域的地图数据。后述的确定部322使用地图信息312来确定运送路线的多个候补。地图信息312例如可以是对表示交差路口等的节点和表示通路的线路进行了编号的道路地图的数据。另外,地图信息312也可以是表示了成为障碍物的建筑物的区域等的环境地图。另外,地图信息312还可以包含与通路的宽度相关的信息。在这样的情况下,后述的确定部322能够基于第一自主移动体100及第二自主移动体的尺寸来确定合适的运送路线的候补。
51.天气信息313是表示运送路线上的天气的信息。天气信息313可以是表示晴、阴、雨等天气的信息,也可以是表示雨量、积雪量、风速的信息。另外,在天气信息313中也可以包
含黄沙的浓度等。
52.判定部321基于天气信息313来判定是否是适合于第二自主移动体200的行驶的天气。判定部321可以基于雨量、积雪量及风速中的至少1个来判定是否是适合于第二自主移动体200的行驶的天气。例如,判定部321可以在雨量超过了规定的阈值的情况下判定为不是适合于第二自主移动体200的行驶的天气。需要说明的是,判定部321也可以从经由互联网等而收集到的各地的天气信息中取得运送路线上的天气信息,判定是否是适合于第二自主移动体200的行驶的天气。
53.确定部322使用地图信息312,关于从出发地点3111到目的地点3112为止的运送路线确定多个候补。确定部322例如在目的地点3112的周围选择第一自主移动体能够停车的多个中间地点y。并且,确定部322可以关于多个中间地点y的各自,确定从出发地点3111到该中间地点y为止的第一运送区间,确定从该中间地点y到目的地点3112为止的第二运送区间,从而确定多个候补。需要说明的是,确定部322也可以确定中间地点y共通而第二运送区间分别不同的多个候补。
54.决定部323在由判定部321判定为不是适合于第二自主移动体200的行驶的天气的情况下,以使第二运送区间的长度变短的方式从多个候补决定运送路线。决定部323例如可以将多个候补中的第二运送区间最短的候补决定为运送路线。另外,决定部323也可以将多个候补中的第二运送区间的长度第二或第三短的候补决定为运送路线。需要说明的是,第二运送区间的长度可以由决定部323算出,也可以由确定部322算出。
55.需要说明的是,判定部321、确定部322及决定部323的各功能可以通过未图示的处理器使程序向ram读入并执行该程序而实现。
56.图4是示出实施方式1的路线决定系统500的动作的流程图。假设判定部321判定为不是适合于第二自主移动体200的行驶的天气。
57.首先,路线决定系统500确定从出发地点3111到目的地点3112为止的运送路线的多个候补(步骤s101)。在此,路线决定系统500可以以使运送路线不过于变长的方式确定合适的候补。需要说明的是,出发地点3111可以是收容配送物的仓库。目的地点3112是表示物品的配送目的地的信息。
58.接着,决定部323以使第二运送区间的长度变短的方式从在步骤s101中确定出的多个候补决定运送路线(步骤s102)。接着,服务器300向第一自主移动体100及第二自主移动体200发送决定出的运送路线(步骤s103)。接着,第一自主移动体100沿着在步骤s103中接收到的运送路线而进行第一运送区间中的自主移动(步骤s104)。最后,第二自主移动体200沿着在步骤s103中接收到的运送路线而进行第二运送区间中的自主移动,将物品运送至目的地点3112(步骤s105)。
59.接着,使用图5及图6来对运送路线的候补的具体例进行说明。图5是示出配送区域的地图。假设路线决定系统500决定从地点x到地点z为止的运送路线。
60.假设路线决定系统500判定为运送路线上的天气不是适合于第二自主移动体200的行驶的天气。在配送区域中,包含宽度不同的2个种类的通路。第一自主移动体100能够通过通路20a,但无法通过通路20b。第二自主移动体200能够通过通路20a及通路20b。
61.确定部322确定运送路线的多个候补。图6示出确定部322确定的多个候补r1及r2。中间地点y1及y2是第一自主移动体100能够停止的位置。路线决定系统500确定从出发地点
x到中间地点y1为止的第一运送区间和从中间地点y1到目的地点z为止的第二运送区间,设为候补r1。另外,路线决定系统500确定从出发地点x到中间地点y2为止的第一运送区间和从中间地点y2到目的地点z为止的第二运送区间,设为候补r2。在图中,将第一运送区间利用实线示出,将第二运送区间利用虚线示出。
62.决定部323比较候补r1中的第二运送区间的长度和候补r2中的第二运送区间的长度。决定部323将第二运送区间比候补r1短的候补r2决定为运送路线。
63.需要说明的是,运送路线中的第二运送区间也可以包含从第一自主移动体100的停止位置到物品的配送目的地为止的路径和从配送目的地到该停止位置为止的路径。也就是说,在第二自主移动体200在物品的配送后返回至第一自主移动体100的停止位置的情况下,运送路线也可以包含从目的地点z到中间地点y为止的移动路径。
64.另外,确定部322也可以确定第一自主移动体100在配送目的地的前方的通路停车的候补。在存在这样的候补的情况下,路线决定系统500将该候补决定为运送路线。第二自主移动体200进行配送目的地的用地内的货物的运送。
65.路线决定系统500在判定为不是适合于第二自主移动体200的行驶的天气的情况下,以使第二自主移动体行驶的距离变短的方式决定运送路线。因此,路线决定系统500在不适合于第二自主移动体的行驶的天气下,能够降低第二自主移动体行驶的距离。
66.需要说明的是,虽然对服务器300决定运送路线的情况进行了说明,但也可以是,第一自主移动体100取得配送目的地的信息,决定从当前地到配送目的地为止的运送路线。也就是说,也可以在第一自主移动体100侧进行由判定部321、确定部322及决定部323进行的处理。第一自主移动体100沿着本装置决定出的运送路线而在第一运送区间中进行自主移动且进行物品的配送。并且,第一自主移动体100将运送路线中的与第二运送区间对应的部分向第二自主移动体200发送。在这样的情况下,路线决定系统500也可以不包含服务器300。也就是说,处理在第一自主移动体100及第二自主移动体200内完结的系统也能够包含于实施方式1的路线决定系统500。
67.(实施方式2)
68.图7是示出实施方式2的路线决定系统500a的概要的概略图。路线决定系统500a对多个配送目的地的各自决定配送与该配送目的地对应的物品的路线。路线决定系统500a例如决定从出发地点x向目的地点z1及目的地点z2运送物品的运送路线。
69.在图7中,存在包含1个第一运送区间的候补r3和包含2个第一运送区间的候补r4。需要说明的是,候补r3和候补r4的出发地点x是相同的位置,但为了容易理解,在附图上设为不同的位置。同样,候补r3中的区间p1c和候补r4中的区间p1c是同一路径,但为了容易理解而表示为离开的位置。关于中间地点y3及区间p2c也是同样。
70.候补r3包含第一自主移动体100从出发地点x移动至中间地点y3的区间p1c、第二自主移动体200从中间地点y3移动至目的地点z1的区间p2c、第二自主移动体200从目的地点z1移动至目的地点z2的区间p2d及第二自主移动体200从目的地点z2移动至中间地点y3的区间p2e。
71.另一方面,候补r4包含第一自主移动体100从出发地点x移动至中间地点y3的区间p1c、第二自主移动体200从中间地点y3移动至目的地点z1的区间p2c及第二自主移动体200从目的地点z1返回中间地点y3的区间p2f。并且,候补r4包含第一自主移动体100从中间地
点y3移动至中间地点y4的区间p1d、第二自主移动体200从中间地点y4移动至目的地点z2的区间p2g及第二自主移动体200从目的地点z2移动至中间地点y4的区间p2h。在图中,将第一运送区间利用实线示出,将第二运送区间利用虚线示出。
72.这样,在存在多个配送目的地的情况下,可能存在第一自主移动体100的移动次数不同的多个运送路线的候补。路线决定系统500a在这样的情况下也以使不适合于行驶的天气下的第二自主移动体200的行驶距离变短的方式决定运送路线。
73.路线决定系统500a的结构与图2是同样的,具备服务器300a、第一自主移动体100及第二自主移动体200。第一自主移动体100及第二自主移动体200的功能与实施方式1是同样的,因此省略说明。
74.接着,使用图8来对服务器300a进行详细说明。以下,以与实施方式1不同的点为中心进行说明。服务器300a的存储部310存储多个目的地点3112a及3112b。需要说明的是,存储部310也可以存储有3处以上的目的地点。
75.确定部322使用地图信息312来确定从出发地点3111出发且通过目的地点3112a及3112b的运送路线的候补。确定部322将确定出的多个候补向决定部323输出。需要说明的是,与实施方式1同样,运送路线也可以包含第二自主移动体200返回至第一自主移动体100的停止位置的路径。也就是说,第二运送区间也可以包含从第一自主移动体100的停止位置到多个配送目的地的任一者为止的路径和从多个配送目的地的任一者到该停止位置为止的路径。
76.确定部322例如在目的地点3112a及目的地点3112b的周边选择第一自主移动体100能够停车的中间地点y,确定从出发地点3111到中间地点y为止的第一运送区间。并且,确定部322也可以确定第二自主移动体200从中间地点y出发且到访目的地点3112a及3112b的第二运送区间。另外,确定部322也可以确定第一自主移动体100在目的地点3112a的周边停止而且在目的地点3112b的周边停止的运送路线的候补。
77.决定部323与实施方式1同样,在运送路线上的天气不适合于第二自主移动体200的行驶的情况下,以使第二运送区间的长度变短的方式从确定部322确定出的多个候补决定运送路线。决定部323经由通信部330而将与第一运送区间对应的部分向第一自主移动体100发送,将与第二运送区间对应的部分向第二自主移动体200发送。需要说明的是,决定部323在天气适合于第二自主移动体200的行驶的情况下,可以将第一自主移动体100的停止次数小的候补决定为运送路线,也可以将运送时间短的候补决定为运送路线。
78.使用图9及图10来对运送路线的具体例进行说明。假设路线决定系统500a决定从出发地点x向目的地点z1及z2运送物品的运送路线。图9是第一自主移动体100在1个中间地点y3停止的情况下的运送路线的候补。图10是第一自主移动体10在2个中间地点y3及y4停止的情况下的运送路线的候补。需要说明的是,对运送路线包含第二自主移动体200返回至第一自主移动体100的停止位置(中间地点)的部分的情况进行说明。
79.图9所示的候补中的第二运送区间是从中间地点y3到目的地点z1为止的区间p2c、从目的地点z1到目的地点z2为止的区间p2d及从目的地点z2到中间地点y3为止的区间p2e。需要说明的是,区间p1c是第一运送区间。
80.图10所示的候补中的第二运送区间是从中间地点y3到目的地点z1为止的区间p2c、从目的地点z1到中间地点y3为止的区间p2f、从中间地点y4到目的地点z2为止的区间
p2g及从目的地点z2到中间地点y4为止的区间p2h。需要说明的是,区间p1c及p1d是第一运送区间。
81.例如,在图9所示的候补中的第二运送区间的长度是400m且图10所示的候补中的第二运送区间的长度是300m的情况下,决定部323将图10所示的候补决定为运送路线。
82.这样,即使在运送路线包含多个配送目的地的情况下,也能够与实施方式1同样地,在不适合于第二自主移动体的行驶的天气下,以使第二自主移动体行驶的距离变短第三方决定运送路线。
83.需要说明的是,在上述的实施方式中,作为硬件的结构而进行了说明,但不限定于此。本公开也能够将任意的处理通过使cpu执行计算机程序而实现。
84.在上述的例子中,程序包含在由计算机读入了的情况下用于使计算机进行在实施方式中说明的1个或其以上的功能的命令群(或软件代码)。程序可以保存于非暂时性的计算机可读介质或具有实体的存储介质。作为非限定的例子,计算机可读介质或具有实体的存储介质包含随机存取存储器(ram)、只读存储器(rom)、快闪存储器、固态驱动器(ssd)或其他的存储器技术、cd-rom、数字通用光盘(dvd)、blu-ray(注册商标)盘或其他的光盘存储器、磁盒、磁带、磁盘存储器或其他的磁存储设备。程序也可以在暂时性的计算机可读介质或通信介质上发送。作为非限定的例子,暂时性的计算机可读介质或通信介质包含电的、光学的、声学的或其他形式的传播信号。
85.需要说明的是,本发明不限于上述实施方式,能够在不脱离主旨的范围内适当变更。
86.根据这样描述的本公开,显而易见的是,可以以多种方式改变本公开的实施例。此类变化不应被视为背离本公开的精神和范围,并且对于本领域技术人员而言显而易见的所有此类修改旨在包含于所附权利要求的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1