一种有人船控制系统快速无人化改造系统的制作方法
1.本发明涉及一种无人船控制系统,具体涉及一种有人船控制系统快速无人化改造系统。
背景技术:
2.在无人技术领域,除了无人车和无人机外,无人船作为智能船舶的代表,在深海探测,区域巡航和环境监测等领域获得了广泛关注和众多应用。
3.由于无人船领域相对有人船而言尚未形成较大的市场规模,市场上缺乏专门为无人船设计和生产的无人化控制系统,而很多无人船需要在传统有人船的基础上改造而成。
技术实现要素:
4.本发明所要解决的技术问题是:针对目前无人船需要在传统有人船基础上加以无人化改造的的需求,本发明提供了一种有人船控制系统快速无人化改造系统,能够对有人船调速推杆和打舵摇杆的控制系统进行快速无人化改造,有助于将无人化技术快速应用于船舶领域。
5.为实现上述对有人船控制系统进行快速无人化改造的目的,本发明提供如下技术方案:一种有人船控制系统快速无人化改造系统,包括控制模块、通讯模块、远程终端、d/a模块、继电器组、切换开关;
6.所述控制模块包括网络接口和控制模块rs485接口,所述网络接口的输入端与通讯模块的输出端电连接,所述通讯模块的输入端与远程终端云连接,所述控制模块rs485接口与d/a模块的输入端电连接;所述d/a模块包括电压输出端和d/a模块rs485信号端,所述电压输出端与切换开关第二组输入端电连接,所述d/a模块rs485信号端与继电器组电连接;所述继电器组包括继电器rs485信号端和电缆输出端,所述继电器rs485信号端与控制模块电连接,所述电缆输出端与切换开关第二组输入端电连接;所述切换开关包括第一组输入端、第二组输入端和切换输出端,所述第一组输入端与有人操控装置电连接,所述切换输出端与执行机构输入端电连接。
7.使用时,将继电器组第1路继电器输出端接至切换开关第二组输入端第1路,将继电器组第2路继电器输出端接至切换开关第二组输入端第2路;将d/a模块第1路电压输出端接至切换开关第二组输入端第3路,将d/a模块第2路电压输出端接至切换开关第二组输入端第4路,将d/a模块第3路电压输出端接至切换开关第二组输入端第5路;将执行机构的左打舵信号线接至切换开关输出端第1路,执行机构的右打舵信号线接至切换开关输出端第2路,执行机构的正反车信号线接至切换开关输出端第3路,执行机构的参考电压信号线接至切换开关输出端第4路,执行机构的调节电压信号线接至切换开关输出端第5路;行驶时,首先通过切换开关选择有人模式或者无人模式或无人船无动作模式;将切换开关选择无人模式后,控制模块发送本地指令至继电器组、d/a模块,控制继电器组、d/a模块的相应线路工作,实现对船的相应控制;控制模块也能够实时通过通讯模块接收并执行远程终端指令,控
制继电器组、d/a模块的相应线路工作,实现对船的相应控制;控制模块通过控制继电器组实现操舵功能,控制模块将第1路继电器接通实现向左打舵,将第2路继电器接通实现向右打舵,将第1路和第2路继电器都断开时不打舵,实现直行;控制模块通过控制d/a模块第1路电压输出端实现正反车功能,d/a模块第1路电压输出端输出0v时无人船反向行驶,d/a模块第1路电压输出端输出5v时无人船正向行驶;控制模块通过控制d/a模块第2路和第3路电压输出端实现速度调节功能,其中d/a模块第2路电压输出端输出的电压为参考电压,将其输出电压固定为a,d/a模块第3路电压输出端输出的电压为调节电压,当其输出电压为b时,无人船速度为0,当其输出电压为c时,无人船达到最大速度,通过在b至c之间调节其输出电压,实现无人船在0至最大速度之间的速度变换;a、b、c分别为设定的电压值,a>c>b。
8.控制模块控制第1路和第2路继电器不同时接通:在接通第2路继电器时,先查询第1路继电器是否处于断开状态,确认第1路继电器断开后下发第2路继电器接通的指令;在接通第1路继电器时,先查询第2路继电器是否处于断开状态,确认第2路继电器断开后下发第1路继电器接通的指令。
9.所述控制模块为stm32系列单片机。
10.所述通讯模块采用tcp/ip协议的网络通讯与网络云端相连。
11.所述d/a模块具备3路以上独立模拟电压输出能力,输出电压范围为0
‑
5v,精度1%以上,与控制模块的通信协议遵循modbus通信。
12.所述继电器组包括2路以上独立开关控制继电器,与控制模块的通信协议遵循modbus通信。
13.所述d/a模块和继电器组为一组rs485总线通信。
14.所述切换开关至少包括5对联动开关。
15.所述执行机构包括主推电机、侧推电机和舵机。
16.本发明与现有技术相比的有益效果是:
17.本发明通过控制模块和d/a模块完成模拟电压输出,通过控制模块和继电器组完成通断控制,通过切换开关完成有人和无人模式的切换,实现了对有人船控制系统进行快速无人化改造,且保留原船有人操控装置的功能,实现有人模式和无人模式的双驾驶模式。
附图说明
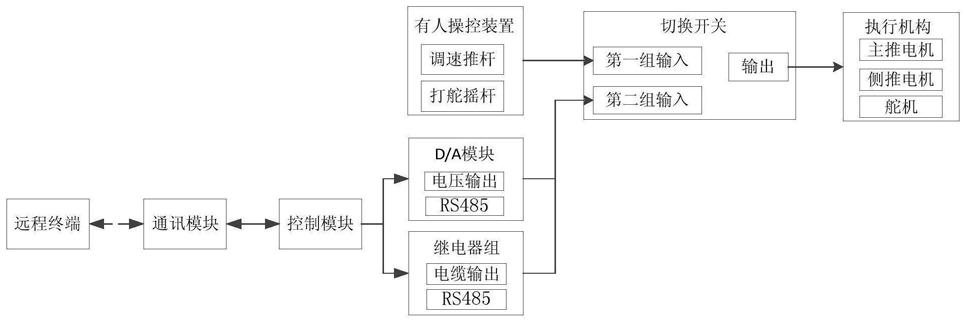
18.图1为本发明的系统示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.如图1,一种有人船控制系统快速无人化改造技术,包括控制模块,控制模块包括网络接口和控制模块rs485接口,网络接口的输入端与通讯模块的输出端电连接,通讯模块的输入端与远程终端云连接,控制模块rs485接口与d/a模块的输入端电连接,d/a模块包括电压输出端和d/a模块rs485信号端,电压输出端与切换开关第二组输入电连接,d/a模块
rs485信号端与继电器组电连接,继电器组包括继电器rs485信号端和电缆输出端,继电器rs485信号端与控制模块电连接,电缆输出端与切换开关第二组输入电连接,切换开关包括第一组输入和第二组输入,第一组输入与有人操控装置电连接,切换输出与执行机构输入端电连接。
21.控制模块为stm32单片机。
22.通讯模块采用tcp/ip协议的网络通讯与网络云端相连。
23.d/a模块具备3路以上独立模拟电压输出能力,输出电压范围为0
‑
5v,精度1%,与控制模块的通信协议遵循modbus通信。
24.继电器组模块包括2路以上独立开关控制继电器,与控制模块的通信协议遵循modbus通信。
25.d/a模块和继电器组模块为一组rs485总线通信。
26.切换开关至少包括5对联动开关。
27.执行机构包括主推电机、侧推电机和舵机。
28.使用时,将有人操控装置的左打舵信号线接至切换开关第一组输入端第1路,有人操控装置的右打舵信号线接至切换开关第一组输入端第2路,有人操控装置的正反车信号线接至切换开关第一组输入端第3路,有人操控装置的参考电压信号线接至切换开关第一组输入端第4路,有人操控装置的调节电压信号线接至切换开关第一组输入端第5路;将继电器组第1路继电器输出端接至切换开关第二组输入端第1路,将继电器组第2路继电器输出端接至切换开关第二组输入端第2路;将d/a模块第1路电压输出端接至切换开关第二组输入端第3路,将d/a模块第2路电压输出端接至切换开关第二组输入端第4路,将d/a模块第3路电压输出端接至切换开关第二组输入端第5路;将执行机构的左打舵信号线接至切换开关输出端第1路,执行机构的右打舵信号线接至切换开关输出端第2路,执行机构的正反车信号线接至切换开关输出端第3路,执行机构的参考电压信号线接至切换开关输出端第4路,执行机构的调节电压信号线接至切换开关输出端第5路;行驶时,首先通过切换开关选择有人模式或者无人模式或无人船无动作模式;将切换开关选择无人模式后,控制模块发送本地指令至继电器组、d/a模块,控制继电器组、d/a模块的相应线路工作,实现对船的相应控制;控制模块也能够实时通过通讯模块接收并执行远程终端指令,控制继电器组、d/a模块的相应线路工作,实现对船的相应控制;控制模块通过控制继电器组实现操舵功能,控制模块将第1路继电器接通实现向左打舵,将第2路继电器接通实现向右打舵,将第1路和第2路继电器都断开时不打舵,实现直行;控制模块通过控制d/a模块第1路电压输出端实现正反车功能,d/a模块第1路电压输出端输出0v时无人船反向行驶,d/a模块第1路电压输出端输出5v时无人船正向行驶;控制模块通过控制d/a模块第2路和第3路电压输出端实现速度调节功能,其中d/a模块第2路电压输出端输出的电压为参考电压,将其输出电压固定为4.4v,d/a模块第3路电压输出端输出的电压为调节电压,当其输出电压为0.7v时,无人船速度为0,当其输出电压为4v时,无人船达到最大速度,通过在0.7v至4v之间调节其输出电压,实现无人船在0至最大速度之间的速度变换。
29.控制模块控制第1路和第2路继电器不同时接通:在接通第2路继电器时,先查询第1路继电器是否处于断开状态,确认第1路继电器断开后下发第2路继电器接通的指令;在接通第1路继电器时,先查询第2路继电器是否处于断开状态,确认第2路继电器断开后下发第
1路继电器接通的指令。
30.将切换开关选择有人模式后,有人操控装置包括调速推杆和打舵摇杆,通过有人操控装置实现无人船左打舵、右打舵、正反向行驶和速度调节。
31.综上所述,一种有人船控制系统快速无人化改造技术通过切换开关,控制模块,继电器组和d/a模块,将通过调速推杆和打舵摇杆控制的有人船快速改造成可无人操控的无人船,并通过卫星网络,实现与远程终端实时信息交互。
32.本发明系统中涉及到的相关模块均为硬件系统模块或者为现有技术中计算机软件程序或协议与硬件相结合的功能模块,该功能模块所涉及到的计算机软件程序或协议的本身均为本领域技术人员公知的技术,其不是本发明系统的改进之处;本发明系统的改进为各模块之间的相互作用关系或连接关系,即为对系统的整体的构造进行改进,以解决本发明系统所要解决的相应技术问题。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
34.本发明未详细说明部分属于本领域技术人员公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1