一种三浮陀螺单机在轨自主管理与控制方法与流程
1.本发明涉及一种三浮陀螺单机在轨自主管理与控制方法,属于惯性仪表应用与控制领域。
背景技术:
2.卫星对三浮陀螺单机的在轨自主运行能力提出了较高要求,要求三浮陀螺单机具备在轨自主化管理和自动健康诊断功能,以实现卫星在轨全周期安全运行。现有三浮陀螺单机的启动均是操作人员手动发送指令按照一定的流程进行陀螺加电后的启动操作;在操作过程中,操作人员先人工判读陀螺状态,然后决定是否进行后续启动操作,直到完成三浮陀螺启动操作,现有单机启动自动化程度低;三浮陀螺单机遥测数据多,数据判读依靠地面人员,导致数据判读不及时,以及存在漏判的问题。
3.同时,三浮陀螺单机属于传统的机械陀螺,陀螺的构成部件多,工艺实现复杂,陀螺控制环节多且耦合度高等特点,上述特点导致三浮陀螺的启动运行复杂、自动化程度低、遥测数据多且判读不及时等不理因素。
技术实现要素:
4.本发明解决的技术问题是:针对目前现有技术中,三浮陀螺存在的各种运行问题,提出了一种三浮陀螺单机在轨自主管理与控制方法。
5.本发明解决上述技术问题是通过如下技术方案予以实现的:
6.一种三浮陀螺单机在轨自主管理与控制方法,步骤如下:
7.(1)陀螺上电,并进行陀螺自启动管理;
8.(2)对启动后的陀螺进行在轨状态诊断管理,根据所得陀螺遥测数据进行自主状态诊断,若存在故障数据则将故障数据下传至地面控制站;
9.(3)对步骤(2)中获取的陀螺遥测数据进行存储管理。
10.所述步骤(1)中,陀螺自启动管理包括:陀螺自动启动、陀螺电机自动启动,其中:
11.所述陀螺自动启动为开启陀螺温度控制、陀螺电机启动控制、陀螺磁悬浮控制,步骤具体为:
12.(1-1)单机产品上电或复位后,进入开启陀螺温度控制环节,开启陀螺控温,控制陀螺温度恒定;
13.(1-2)进入陀螺温度遥测检测环节,持续监测陀螺温度遥测数据,当陀螺温度遥测数值满足预设陀螺温度条件后进入步骤(1-3),否则保持持续监测直至满足预设陀螺温度条件;
14.(1-3)进入陀螺电机启动控制环节,启动陀螺电机后进入陀螺磁悬浮控制环节,开启磁悬浮用于陀螺磁悬浮控制,陀螺进入稳定运行状态。
15.所述陀螺电机自动启动具体为:
16.根据陀螺电机控制获取电机遥测数据,并进行陀螺电机自主启动,具体步骤如下:
17.当陀螺进入陀螺电机启动控制环节后,陀螺电机接收到电机开启指令,进行陀螺电机状态判断,若陀螺电机状态为已开启,则令陀螺转入陀螺磁悬浮控制环节,否则对陀螺电机启动参数进行设置,进入陀螺电机使能电机控制电路环节,为陀螺电机施加控制信号进行驱动;
18.进入陀螺电机启动判断环节,判定陀螺电机转速是否满足预设陀螺转速条件,若满足条件,则进入陀螺磁悬浮控制环节,否则进入故障模式管理环节,记录陀螺电机启动参数及启动过程状态数据,将所得数据进行在轨下传至地面控制站进行排查。
19.所述步骤(2)中,陀螺在轨状态诊断管理为对陀螺温度遥测数据、陀螺电机状态遥测数据、电机母线电流遥测数据、磁悬浮电流遥测数据和电路温度遥测数据进行在线诊断,具体为:
20.i
min
≤i≤i
max
21.式中,i
min
为诊断下限值,i
max
为诊断上限值。
22.所述诊断下限值、上限值根据陀螺历史诊断数据确定。
23.所述步骤(3)中,陀螺遥测数据存储管理具体为:
24.对陀螺温度遥测数据、陀螺电机状态遥测数据、电机母线电流遥测数据、磁悬浮电流遥测数据和电路温度遥测数据进行存储管理。
25.所述陀螺遥测数据存储管理采用异常事件触发机制,当各遥测数据满足触发机制时进行在轨遥测数据存储,具体为:
26.q
lmin
≤i≤q
lmax
27.q
hmin
≤i≤q
hmax
28.式中,q
lmin
为启动存储的下边界下限值,q
lmax
为启动存储的下边界上限值,q
hmin
为启动存储的上边界下限值,q
hmax
为启动存储的上边界上限值。
29.所述启动存储的下边界下限值、下边界上限值、上边界下限值、上边界上限值根据陀螺历史存储管理数据确定。
30.本发明与现有技术相比的优点在于:
31.(1)本发明提供的一种三浮陀螺单机在轨自主管理与控制方法,将现有人工操作过程总结提炼,转换成自主管理的软件算法,采取单机自主判断、自主启动的方式在线完成,提高了单机自主管理能力,同时现有人工数据判读转换为软件自动判读,一方面增加了数据判读的及时性,另一方面避免了数据漏判问题的发生;
32.(2)本发明基于异常事件触发机制的单机“黑匣子”的功能可以在第一时间保存数据,有利于在轨发生单机故障时的问题定位及后续分析,并由单机处理器的应用软件实施,上述功能不会增加单机的成本、体积和重量,但是会极大增强与升级三浮陀螺单机自主化管理和自动健康诊断能力,有效提高了三浮陀螺单机自动化管理水平,提高了在轨数据判读及时性,解决了现有技术存在漏判的问题。
附图说明
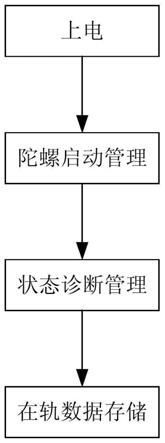
33.图1为发明提供的陀螺单机在轨自主管理与诊断流程;
34.图2为发明提供的陀螺自动启动管理流程图;
35.图3为发明提供的陀螺电机自主启动管理流程图;
36.图4为发明提供的陀螺在轨状态诊断管理示意图;
37.图5为发明提供的在轨遥测数据存储示意图;
具体实施方式
38.一种三浮陀螺单机在轨自主管理与控制方法,能够增强与升级三浮陀螺单机自主化管理和自动健康诊断能力的方法,同时可以异常事件触发机制的在线数据存储,实现了单机“黑匣子”的功能,有利于在轨发生单机故障时的问题定位及后续分析,具体步骤流程如下:
39.(1)陀螺上电,并进行陀螺自启动管理;
40.其中,陀螺自启动管理包括:陀螺自动启动、陀螺电机自动启动,其中:
41.所述陀螺自动启动为开启陀螺温度控制、陀螺电机启动控制、陀螺磁悬浮控制,步骤具体为:
42.(1-1)单机产品上电或复位后,进入开启陀螺温度控制环节,开启陀螺控温,控制陀螺温度恒定;
43.(1-2)进入陀螺温度遥测检测环节,持续监测陀螺温度遥测数据,当陀螺温度遥测数值满足预设陀螺温度条件后进入步骤(1-3),否则保持持续监测直至满足预设陀螺温度条件;
44.(1-3)进入陀螺电机启动控制环节,启动陀螺电机后进入陀螺磁悬浮控制环节,开启磁悬浮用于陀螺磁悬浮控制,陀螺进入稳定运行状态;
45.其中,陀螺电机自动启动具体为:
46.根据陀螺电机控制获取电机遥测数据,并进行陀螺电机自主启动,具体步骤如下:
47.当陀螺进入陀螺电机启动控制环节后,陀螺电机接收到电机开启指令,进行陀螺电机状态判断,若陀螺电机状态为已开启,则令陀螺转入陀螺磁悬浮控制环节,否则对陀螺电机启动参数进行设置,进入陀螺电机使能电机控制电路环节,为陀螺电机施加控制信号进行驱动;
48.进入陀螺电机启动判断环节,判定陀螺电机转速是否满足预设陀螺转速条件,若满足条件,则进入陀螺磁悬浮控制环节,否则进入故障模式管理环节,记录陀螺电机启动参数及启动过程状态数据,将所得数据进行在轨下传至地面控制站进行排查;
49.(2)对启动后的陀螺进行在轨状态诊断管理,根据所得陀螺遥测数据进行自主状态诊断,若存在故障数据则将故障数据下传至地面控制站;
50.其中,陀螺在轨状态诊断管理为对陀螺温度遥测数据、陀螺电机状态遥测数据、电机母线电流遥测数据、磁悬浮电流遥测数据和电路温度遥测数据进行在线诊断,具体为:
51.i
min
≤i≤i
max
52.式中,i
min
为诊断下限值,i
max
为诊断上限值;
53.诊断下限值、上限值根据陀螺历史诊断数据确定;
54.(3)对步骤(2)中获取的陀螺遥测数据进行存储管理;
55.其中,陀螺遥测数据存储管理具体为:
56.对陀螺温度遥测数据、陀螺电机状态遥测数据、电机母线电流遥测数据、磁悬浮电流遥测数据和电路温度遥测数据进行存储管理;
57.陀螺遥测数据存储管理采用异常事件触发机制,当各遥测数据满足触发机制时进行在轨遥测数据存储,具体为:
58.q
lmin
≤i≤q
lmax
59.q
hmin
≤i≤q
hmax
60.式中,q
lmin
为启动存储的下边界下限值,q
lmax
为启动存储的下边界上限值,q
hmin
为启动存储的上边界下限值,q
hmax
为启动存储的上边界上限值;
61.启动存储的下边界下限值、下边界上限值、上边界下限值、上边界上限值根据陀螺历史存储管理数据确定。
62.下面结合具体实施例进行进一步说明:
63.如图1所示,三浮陀螺单机在轨自主管理与控制方法主要包括陀螺自动启动管理;陀螺在轨状态诊断管理;在轨遥测数据存储三部分内容,其中:
64.陀螺自启动管理包括陀螺自动启动和陀螺电机自动启动;陀螺自动启动是按照顺序关系依次开启陀螺温度控制环节、陀螺电机控制环节、陀螺磁悬浮控制环节;陀螺电机自动启动管理是按照电机控制环节的遥测数据进行电机的自主启动过程;
65.陀螺在轨状态诊断管理是对陀螺温度遥测、陀螺电机状态遥测、电机母线电流遥测、磁悬浮电流遥测和电路温度遥测进行自主状态诊断,识别其中故障数据并下传至地面供设计人员再次判读;
66.在轨遥测数据存储是对单机产品的陀螺温度遥测、陀螺电机状态遥测、电机母线电流遥测、磁悬浮电流遥测和电路温度遥测等遥测数据进行存储管理。
67.如图2所示,陀螺自动启动管理步骤具体为:
68.(1)单机产品上电或复位后,陀螺自动启动管理流程进入开启陀螺温度控制环节,开启陀螺温控,用于陀螺恒定温度控制;
69.(2)步骤(1)流程完成后,陀螺自动启动管理流程进入陀螺温度遥测监测环节;在该环节中,持续监测陀螺温度遥测数据,当陀螺温度遥测数值满足设定条件后进入下一环节,否则继续监测陀螺温度遥测数据;
70.(3)步骤(2)流程完成后,陀螺自动启动管理流程进入陀螺电机启动环节,完成陀螺启动操作后,流程进入下一环节;
71.(4)步骤(3)流程完成后,陀螺自动启动管理流程进入磁悬浮控制环节,开启磁悬浮,用于陀螺磁悬浮控制;
72.(5)步骤(4)流程完成后,陀螺自动启动管理流程进入稳定运行环节,至此陀螺自动启动管理结束。
73.如图3所示,陀螺电机自动启动管理具体为:
74.(1)陀螺电机自主启动管理流程接收到电机开启指令后,启动陀螺电机自主启动管理流程;
75.(2)步骤(1)开启后,陀螺电机自主启动管理流程进入电机状态判断环节,该环节判定陀螺电机状态;如果陀螺电机状态为已开启,则陀螺电机自主启动管理流程直接进去闭环运行环节;否则陀螺电机自主启动管理流程进去下一环节;
76.(3)步骤(2)流程完成后,陀螺电机自主启动管理流程进入设置启动参数环节,该环节中设置陀螺电机启动参数,用于陀螺电机启动前的参数准备;
77.(4)步骤(3)流程完成后,陀螺电机自主启动管理流程进入使能电机控制电路环节,该环节使能电机控制电路,给陀螺电机施加控制信号,用于驱动陀螺电机;
78.(5)步骤(4)流程完成后,陀螺电机自主启动管理流程进入电机启动判断环节,该环节判定电机转速状态满足是否满足设定条件;
79.(6)如果步骤(5)的条件满足,陀螺电机自主启动管理流程进入闭环运行环节;
80.(7)如果步骤(5)的条件不满足,陀螺电机自主启动管理流程进入故障模式管理环节,该环节中记录陀螺电机启动参数以及启动过程状态数据,并将这些数据传输到通讯部件,用于在轨数据下传,供地面人员排查。
81.如图4所示,陀螺在轨状态诊断管理具体为:对陀螺温度遥测、陀螺电机状态遥测、电机母线电流遥测、磁悬浮电流遥测和电路温度遥测进行在线持续诊断,诊断的方法可统一为以下形式:
82.i
min
≤i≤i
max
83.其中,i
min
为诊断下限值,i
max
为诊断上限值,诊断的上限值和上限值根据历史数据确定。
84.陀螺在轨状态诊断管理输出信息为标志位,该标志位通过通讯部件下传,供地面人员审查。
85.如图5所示,在轨遥测数据存储具体为:
86.在轨遥测数据存储采用异常事件触发机制,只有当陀螺温度遥测、陀螺电机状态遥测、电机母线电流遥测、磁悬浮电流遥测和电路温度遥测满足以下条件时才触发在轨遥测数据存储功能;
87.q
lmin
≤i≤q
lmax
88.q
hmin
≤i≤q
hmax
89.其中,q
lmin
为启动存储的下边界下限值,q
lmax
为启动存储的下边界上限值,q
hmin
为启动存储的上边界下限值,q
hmax
为启动存储的上边界上限值;启动存储的下边界上限值、下边界下限值、上边界上限值、下边界下限值根据历史数据确定。
90.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
91.本发明说明书中未作详细描述的内容属于本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1