一种节省算力和带宽的无人机全向避障方法与流程
1.本发明涉及无人机技术领域,具体为一种节省算力和带宽的无人机全向避障方法。
背景技术:
2.现有的无人机避障方案,大都采用激光雷达,超声波、双目测距模块等传感器,这些避障方案,基本都是用一个传感器,只能避一个方向的障碍,也有采用一个传感器外加一个旋转马达,通过控制旋转马达将测距传感器进行360度旋转不间断扫描来达到全向避障的目的。
3.现有的全向避障方案,在飞机上安装多个避障传感器,如激光雷达,成本太高,无法大规模推广应用;用多个超声波测距模块来做全向避障,由于超声波是单点测距,所以对于复杂的环境应用就受到限制;采用旋转马达控制测距传感器360度不间断扫描进行全向避障,由于扫描速度的限制,在飞机高速飞行的情况下,当马达扫描到飞机飞行方向以外的区域时,飞机仍然有可能会碰到障碍。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种节省算力和带宽的无人机全向避障方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种节省算力和带宽的无人机全向避障方法,包括以下步骤:
6.s1、连接电源,启动无人机,利用无人机控制启动整个模块,打开光流模块,启动光流摄像头进行画面采集,采集的画面传输给雷达设备进行定位出图;
7.s2、启动光流模块,采用光流算法,用lk光流算法计算飞机当前的光流速度;
8.s3、根据光流模块输出的光流速度,计算飞机当前的飞行或漂移方向;
9.s4、根据光流模块计算得到的无人机飞行方向,启动对应方向的双目测距模块;
10.s5、如果飞机处于悬停状态,即光流模块计算得到的光流速度x和y同时在0附近波动,此时认为飞机处于静止悬停的状态,不会撞到障碍物。
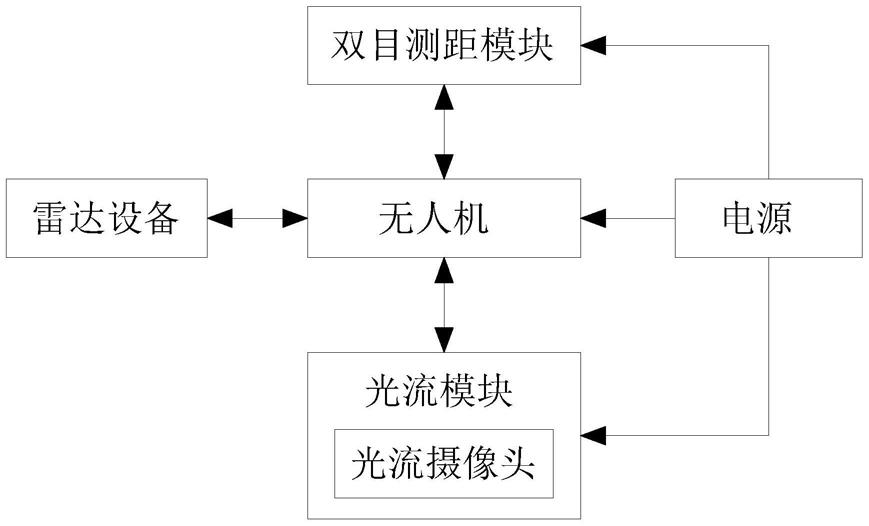
11.进一步优化本技术方案,所述无人机的控制系统包括无人机主控器以及电源,所述无人机主控器与双目测距模块、光流模块进行电连接,所述光流模块内设置有光流摄像头,所述电源通过无人机主控器分别与双目测距模块、光流模块以及雷达设备进行电连接并进行供电。
12.进一步优化本技术方案,所述无人机主控器电连接有安装在无人机四周主体上的雷达设备,所述雷达设备设置有4个,且分别安装在无人机的正前方、正后方、正左和正右方,所述雷达设备用于对光流摄像头采集的画面信息进行定位出图。
13.进一步优化本技术方案,所述双目测距模块:利用双目成像原理,计算图像画面中所有点对应的实际景物离双目摄像头中心的距离,设置4个双目测距模块,分别安装在无人
机的正前方、正后方、正左和正右方。
14.进一步优化本技术方案,所述光流模块:光流摄像头安装在飞机的下方,光流摄像头朝下采集飞机下方的画面,光流算法根据前后两帧画面和lk光流原理计算飞机在水平方向的速度,包括大小和方向。
15.进一步优化本技术方案,所述步骤s2中,lk光流算法有三个假设条件:亮度恒定、小运动以及空间一致,用lk光流算法计算飞机当前的光流速度(op_x,op_y)。
16.进一步优化本技术方案,所述步骤s3中,计算飞机当前的飞行或漂移方向公式如下:
[0017][0018][0019][0020]
θ=0
°ꢀ
x=0,y≤0
[0021]
θ=90
°ꢀ
x<0,y=0
[0022]
θ=
‑
90
°ꢀ
x>0,y=0
[0023]
θ=
±
180
°ꢀ
x=0,y>0
[0024]
进一步优化本技术方案,规定朝向飞机机头正前方飞行,角度为0,往飞机正右方飞行,角度为
‑
90度,往飞机正左方飞行,角度为90度,往飞机正后方飞行,角度为
‑
180度或180度。
[0025]
进一步优化本技术方案,将无人机飞行方向划分为4个区域,
‑
135度
‑‑
45度为第一区域;
‑
45度
‑‑
45度为第二区域;45度
‑‑
135度为第三区域;135
‑‑
45度为第四区域。
[0026]
与现有技术相比,本发明提供了一种节省算力和带宽的无人机全向避障方法,具备以下有益效果:
[0027]
1、本发明采用4个双目模块,安装在飞机的前后左右四个方向上,来做全向的避障,解决了4个双目测距算法同时启动占用大量的芯片算力和带宽,根据飞机的飞行方向,只启动飞机飞行方向的双目测距模块,其它方向的测距模块不启动,这样就能大大节省芯片的算力和带宽。
[0028]
2、为计算飞机的飞行方向问题,通过在飞机下方安装一个摄像头,根据这个摄像头和光流算法,计算飞机当前的飞行方向和速度,同时将这个信息反馈给飞行控制端,飞行控制端根据这个信息控制飞机悬停状态的稳定性。
[0029]
3、雷达设备用于对光流摄像头采集的画面信息进行定位出图,绘制出无人机附近环境地形图,利于对无人机进行避障,大大提高了其功能性。
附图说明
[0030]
图1为本发明提出的一种节省算力和带宽的无人机全向避障方法的系统模块示意图;
[0031]
图2为本发明提出的一种节省算力和带宽的无人机全向避障方法的流程示意图;
[0032]
图3为本发明提出的一种节省算力和带宽的无人机全向避障方法的光流速度和飞机对应关系示意图;
[0033]
图4为本发明提出的一种节省算力和带宽的无人机全向避障方法的无人机飞行方向划分为4个区域示意图。
具体实施方式
[0034]
下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
请参考图1
‑
2所示,本发明公开了一种节省算力和带宽的无人机全向避障方法,包括以下步骤:
[0036]
s1、连接电源,启动无人机,无人机采用多旋翼无人机,且该多旋翼无人机具有独立飞行功能,利用无人机控制启动整个模块,打开光流模块,启动光流摄像头进行画面采集,采集的画面传输给雷达设备进行定位出图;
[0037]
其中:所述无人机的控制系统包括无人机主控器以及电源,所述无人机主控器与双目测距模块、光流模块进行电连接,所述光流模块内设置有光流摄像头,所述电源通过无人机主控器分别与双目测距模块、光流模块以及雷达设备进行电连接并进行供电,所述无人机主控器电连接有安装在无人机四周主体上的雷达设备,所述雷达设备设置有4个,且分别安装在无人机的正前方、正后方、正左和正右方,所述雷达设备用于对光流摄像头采集的画面信息进行定位出图,绘制出无人机附近环境地形图,利于对无人机进行避障,大大提高了其功能性。
[0038]
s2、启动光流算法,用lk光流算法计算飞机当前的光流速度(op_x,op_y);
[0039]
其中:lk光流算法有三个假设条件:亮度恒定、小运动以及空间一致,所述亮度恒定:一个像素点随着时间的变化,其亮度值是恒定不变的,这是光流法的基本设定,所有光流法都必须满足;所述小运动:时间的变化不会引起位置的剧烈变化,这样才能利用相邻帧之间的位置变化引起的灰度值变化,去求取灰度对位置的偏导数,所有光流法必须满足;所述空间一致:即前一帧中相邻像素点在后一帧中也是相邻的,这是lk光流法独有的假定,因为为了求取x,y方向的速度,需要建立多个方程联立求解,而空间一致假设就可以利用邻域n个像素点来建立n个方程。
[0040]
s3、根据光流模块输出的光流速度,计算飞机当前的飞行或漂移方向,公式如下:
[0041][0042][0043][0044]
θ=0
°ꢀ
x=0,y≤0
[0045]
θ=90
°ꢀ
x<0,y=0
[0046]
θ=
‑
90
°ꢀ
x>0,y=0
[0047]
θ=
±
180
°ꢀ
x=0,y>0
[0048]
其中光流速度和飞机对应关系如图3所示。
[0049]
规定朝向飞机机头正前方飞行,角度为0,往飞机正右方飞行,角度为
‑
90度,往飞机正左方飞行,角度为90度,往飞机正后方飞行,角度为
‑
180度或180度。
[0050]
将无人机飞行方向划分为4个区域,如图4所示。
[0051]
1):
‑
135度
‑‑
45度为第一区域;
[0052]
2):
‑
45度
‑‑
45度为第二区域;
[0053]
3):45度
‑‑
135度为第三区域;
[0054]
4):135
‑‑
45度为第四区域。
[0055]
s4、根据光流模块计算得到的无人机飞行方向,启动对应方向的双目测距模块;
[0056]
例如:a:当飞机飞行方向在第一区域时,则启动飞机右侧的双目模块;
[0057]
b:当飞机飞行方向在第二区域时,则启动飞机正前方的双目测距模块;
[0058]
以此类推。
[0059]
s5、如果飞机处于悬停状态,即光流模块计算得到的光流速度x和y同时在0附近波动,此时认为飞机处于静止悬停的状态,不会撞到障碍物,因此可以关闭测距模块以减少资源消耗。
[0060]
这样做,避免了传统做法每次都将飞机上所有的测距模块都启动起来,大大减少了测距模块对cpu算力的消耗和带宽的消耗。
[0061]
作为本实施例的具体优化方案,所述双目测距模块和光流模块均与无人机主控器进行电连接,所述光流模块内设置有光流摄像头。
[0062]
其中,所述双目测距模块:利用双目成像原理,计算图像画面中所有点对应的实际景物离双目摄像头中心的距离,设置4个双目测距模块,分别安装在无人机的正前方、正后方、正左和正右方。
[0063]
其中,所述光流模块:光流摄像头安装在飞机的下方,光流摄像头朝下采集飞机下方的画面,光流算法根据前后两帧画面和lk光流原理计算飞机在水平方向的速度,包括大小和方向。
[0064]
本发明的有益效果是:
[0065]
1、本发明采用4个双目模块,安装在飞机的前后左右四个方向上,来做全向的避障,解决了4个双目测距算法同时启动占用大量的芯片算力和带宽,根据飞机的飞行方向,只启动飞机飞行方向的双目测距模块,其它方向的测距模块不启动,这样就能大大节省芯片的算力和带宽。
[0066]
2、为计算飞机的飞行方向问题,通过在飞机下方安装一个摄像头,根据这个摄像头和光流算法,计算飞机当前的飞行方向和速度,同时将这个信息反馈给飞行控制端,飞行控制端根据这个信息控制飞机悬停状态的稳定性。
[0067]
3、雷达设备用于对光流摄像头采集的画面信息进行定位出图,绘制出无人机附近环境地形图,利于对无人机进行避障,大大提高了其功能性。
[0068]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1