一种开放式可重构的飞行控制系统软件架构实现方法
1.本发明涉及飞行控制技术领域,具体为一种航空飞行器用的开放式可重构的飞行控制系统软件架构实现方法。
背景技术:
2.当前的飞行控制系统一般都是层次化回路式的控制系统架构,其算法软件面向特定任务设计,算法执行逻辑固定,软件与硬件是紧耦合,硬件难以互换,软件复用率低,扩展困难、升级成本高。实现特定任务功能的飞行控制系统均需要一整套的飞行控制硬件和软件,其中硬件主要包括任务载荷、传感器、数据总线、执行机构、飞控计算机;软件主要包括操作界面、导航算法、制导算法、控制算法、飞行管理算法等。如果想要完成更多的使命任务,需要进行整个飞行器的升级改造,搭载新的或更多的任务载荷,并开发飞行控制系统软件。从而导致耗费高昂的开发成本,且多个飞行器型号,增加管理运维的困难和成本。
3.近年来随着人工智能技术的迅速发展,面向智能自主任务的飞行控制技术方面的研究也受到了国家及业界高度重视,与此同时,系统硬件快速升级,基于智能的任务决策,综合的飞行管理,基于模型的控制,先进的健康管理技术,已成为未来先进飞行控制技术的发展趋势。因此为适应面向未来、不断变化的智能自主任务,需要设计一种新型的飞行控制系统架构。
技术实现要素:
4.为解决现有技术存在的问题,克服现有技术不足,本发明提出一种开放式可重构的飞行控制系统软件架构实现方法,实现控制系统的分布式计算和模块化设计,并支持多个功能模块即插即用,算法组件按需动态加载,从而能够方便地通过软件算法重新定义飞行器功能,使不同的飞行器可以共享飞行控制组件与部分或全部功能模块组件,进而达到性能提升和成本降低的目标。
5.本发明的技术方案为:
6.所述一种开放式可重构的飞行控制系统软件架构实现方法,包括以下步骤:
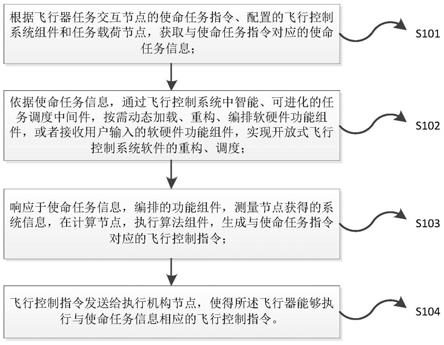
7.步骤1:根据飞行器任务交互节点的使命任务指令、配置的飞行控制算法组件和任务载荷节点,获取与使命任务指令对应的使命任务信息;
8.步骤2:依据步骤1获取的使命任务信息,通过飞行控制系统中智能、可进化的任务调度中间件,按需动态加载、重构、编排算法组件,或者接收用户输入的算法组件,实现开放式飞行控制系统软件的重构、调度;
9.步骤3:响应于使命任务信息、编制的算法组件以及测量节点获得的系统信息,在计算节点执行算法组件,生成与使命任务指令对应的飞行控制指令;
10.步骤4:将步骤3生成的飞行控制指令发送给执行机构节点,使得所述飞行器能够执行与使命任务信息相应的飞行控制指令。
11.进一步的,步骤1中,所述飞行器任务交互节点的使命任务指令,包括但不限于有
人驾驶飞机的飞行员
‑
飞机交互指令,无人驾驶飞行器的地面站遥控指令或自主任务指令,飞行器集群飞行任务的交互指令。
12.进一步的,步骤1中,所述配置的飞行控制算法组件,包括数据融合、态势感知、任务规划、导航定位、目标跟踪、路径规划、协同制导、控制执行、故障容错功能模块;所述飞行控制算法组件为具有模块化功能的飞行控制算法组件,能够包含子组件,所述子组件为能够履行独立的子功能,或者为具有同一功能的不同类型的算法组件。
13.进一步的,步骤1中,所述任务载荷节点,是与使命任务指令匹配的、能够完成使命任务的设备;所述任务载荷节点综合使命任务指令、飞行控制算法组件,能够获取与使命任务指令对应的使命任务信息。
14.进一步的,步骤1中,所述使命任务信息是根据使命任务、外部态势、系统状态变化,以及飞行控制算法组件,生成的遂行整个使命任务的动态过程信息。
15.进一步的,步骤2中,所述任务调度中间件能够根据飞行控制算法组件资源的可用性、使命任务信息,动态的加载、卸载、调度、配置飞行控制算法组件;所述任务调度中间件具有智能、可进化功能,在任务执行过程中,按性能优化,能够重构算法组件,自适应任务效能;所述任务调度中间件,能够接收用户编制的特定的任务调度过程,调度相应的飞行控制算法组件。
16.进一步的,步骤3中,所述编制的算法组件,包括但不限于数据融合、态势感知、任务规划、导航定位、目标跟踪、路径规划、协同制导、控制执行、故障容错算法组件之一,或者这些算法组件的组合。
17.进一步的,步骤3中,所述测量节点为飞行器携带的系统信息测量设备,包括但不限于imu、gps、速度、大气测量系统设备及其组合。
18.进一步的,步骤3中,所述计算节点为包含处理器和存储器的电子计算设备,所述计算节点响应于使命任务信息、编制的算法组件以及测量节点获得的系统信息,执行算法组件,生成与使命任务指令对应的飞行控制指令。
19.进一步的,步骤4中,所述执行机构节点为动力系统及飞行器操纵面的操纵机构;飞行控制指令发送给执行机构节点,使得所述飞行器能够执行与使命任务信息相应的飞行控制指令,遂行使命任务。
20.上述开放式可重构的飞行控制系统,与传统的层次化的控制“回路”概念不同,该开放式飞行控制系统,其概念向顶层的任务层面延伸,还包含了交互、感知、决策、监督、规划、执行、协同、优化等功能。而不同的(子)功能算法组件,采用标准化接口,通过中间件的智能调度,根据cpu算力,在不同cpu、线程上负载均衡的执行。并在开放式系统架构基础上,通过统一标准化的接口,可确保接入组件与飞行控制系统软件的即插即用,实现与其他组件之间的信息交互与任务协同。
21.有益效果
22.本发明能实现飞行控制系统软硬件解耦、动态自适应重构、模块化设计,不仅支持重新定义飞行器任务功能,具有开放性、易扩展等特点,而且可以在飞行器生命周期内达到系统升级、性能提升和成本降低的目标。
23.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
24.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
25.图1为本发明实施例提供的一种开放式飞行控制系统软件架构的飞行控制流程示意图。
26.图2为本发明实施例提供的一种开放式飞行控制系统软件架构示意图。
27.图3为本发明实施例中的有人驾驶飞行任务中的算法组件调度示意图。
28.图4为本发明实施例中的无人驾驶飞行任务中的算法组件调度示意图。
29.图5为本发明实施例中分布式计算的计算负载均衡调度示意图。
具体实施方式
30.由背景技术部分可知,当前的飞行控制系统一般都是层次化回路式的控制系统架构,其算法软件面向特定任务设计,算法执行逻辑固定,软件与硬件是紧耦合,进而导致系统缺少灵活性,软件复用率低,扩展困难、升级成本高。
31.为了解决现有技术问题,本发明实施例提供了一种开放式可重构的飞行控制系统软件架构实现方法。下面结合具体附图和实施例对本发明作进一步说明。
32.本发明基本思想是将飞行控制系统的算法组件化、模块化,采用开放式系统架构,架构由模块化的算法组件组成,各组件之间松散耦合,通过标准化数据接口,使系统能够以开放的方式,支持算法组件的即插即用,实现功能扩展和系统进化。
33.因此,本发明所提出的一种开放式可重构的飞行控制系统软件架构实现方法,实现控制系统的分布式计算和模块化设计,并支持多个功能模块即插即用,算法组件按需动态加载,能够方便地通过软件算法重新定义飞行器功能,使不同的飞行器可以共享飞行控制组件与部分或全部功能模块组件,达到性能提升和成本降低的目标。
34.如图1所示,是本发明实施例提供的一种开放式飞行控制系统软件架构的飞行控制流程示意图,其中,该开放式飞行控制系统软件架构中包括至少一个可即插即用的任务功能算法组件。
35.软件架构组成如图2所示,包括环境层、算法层、管理层和应用层,环境层包括模型库、底层驱动、辅助工具以及操作系统,算法层则是具有模块化功能的飞行控制算法组件;管理层由中间件组成,应用层则是不同的应用任务。
36.该开放式飞行控制系统软件架构的飞行控制方法可以包括以下步骤:
37.步骤1:根据飞行器任务交互节点的使命任务指令、配置的飞行控制算法组件和任务载荷节点,获取与使命任务指令对应的使命任务信息;
38.其中所述飞行器任务交互节点的使命任务指令,包括但不限于有人驾驶飞机的飞行员
‑
飞机交互指令,无人驾驶飞行器的地面站遥控指令或自主任务指令,飞行器集群飞行任务的交互指令,如图3和图4中分别给出了有人驾驶任务和无人驾驶任务示意图。
39.所述配置的飞行控制算法组件,则包括数据融合、态势感知、任务规划、导航定位、目标跟踪、路径规划、协同制导、控制执行、故障容错等功能模块;本发明的基本思想就是将飞行控制系统的算法组件化、模块化,这些具有模块化功能的飞行控制算法组件中还能够包含子组件,能够履行独立的子功能。
40.所述任务载荷节点,是与使命任务指令匹配的、能够完成使命任务的设备;所述任务载荷节点综合使命任务指令以及飞行控制算法组件,能够获取与使命任务指令对应的使命任务信息。
41.而所述使命任务信息是根据使命任务、外部态势、系统状态变化,以及飞行控制算法组件,生成的遂行整个使命任务的动态过程信息。
42.步骤2:依据步骤1获取的使命任务信息,通过飞行控制系统中智能、可进化的任务调度中间件,按需动态加载、重构、编排算法组件,或者接收用户输入的算法组件,实现开放式飞行控制系统软件的重构、调度。
43.如图3、图4和图5所示,所述任务调度中间件能够根据飞行控制算法组件资源的可用性、使命任务信息,动态的加载、卸载、调度、配置飞行控制算法组件;任务调度中间件具有智能、可进化功能,在任务执行过程中,按性能优化,能够重构算法组件,自适应任务效能;而且任务调度中间件也能够接收用户编制的特定的任务调度过程,调度相应的飞行控制算法组件。
44.步骤3:响应于使命任务信息、编制的算法组件以及测量节点获得的系统信息,在计算节点执行算法组件,生成与使命任务指令对应的飞行控制指令;
45.其中的所述编制的算法组件,包括但不限于数据融合、态势感知、任务规划、导航定位、目标跟踪、路径规划、协同制导、控制执行、故障容错算法组件之一,或者这些算法组件的组合,如图2中算法层中包含的算法组件。
46.而所述测量节点为飞行器携带的系统信息测量设备,包括但不限于imu、gps、速度、大气测量系统设备及其组合。此外,所述计算节点为包含处理器和存储器的电子计算设备。
47.步骤4:将步骤3生成的飞行控制指令发送给执行机构节点,使得所述飞行器能够执行与使命任务信息相应的飞行控制指令。所述执行机构节点为动力系统及飞行器操纵面的操纵机构;飞行控制指令发送给执行机构节点,使得所述飞行器能够执行与使命任务信息相应的飞行控制指令,遂行使命任务。
48.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1