自动驾驶行进路径生成装置及自动驾驶装置的制作方法
1.本发明涉及自动驾驶行进路径生成装置及自动驾驶装置。
背景技术:
2.以往,作为与自动驾驶的行进路径的生成相关的技术文献,已知有日本特开2008-158969。在该公报中记载了如下装置:通过求出其他车辆能够采取的预测路径中的与自身车辆的路径发生干涉的路径,从而计算自身车辆与其他车辆的碰撞概率。
技术实现要素:
3.在基于移动体的地图上的位置和地图信息来算出移动体的多个预测路径的情况下,根据移动体的速度等举动,有时实际上移动体无法按照预测路径移动,预测路径的实现可能性低。在自身车辆(车辆)的行进路径的生成中使用移动体的预测路径的情况下,可以认为这样的实现可能性低的预测路径造成的影响小。因此,期望根据预测路径的实现可能性来生成车辆的自动驾驶的行进路径。
4.在本技术领域中,期望提供能够根据位于车辆的周围的移动体的预测路径的实现可能性适当地生成自动驾驶的行进路径的自动驾驶行进路径生成装置及自动驾驶装置。
5.本发明的一技术方案是生成车辆的自动驾驶的行进路径的自动驾驶行进路径生成装置,具备:移动体识别部,所述移动体识别部识别位于车辆的周围的移动体;路径算出部,所述路径算出部基于车辆的地图上的位置、移动体的地图上的位置及地图信息,算出车辆的自动驾驶的自身车辆路径和移动体的多个预测路径;预测加速度算出部,所述预测加速度算出部基于多个预测路径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测加速度;对象路径确定部,所述对象路径确定部基于预测加速度与加速度阈值的比较结果,确定多个预测路径中的在行进路径的生成中使用的预测路径即对象路径;以及行进路径生成部,所述行进路径生成部基于自身车辆路径和对象路径生成行进路径。
6.根据本发明的一技术方案的自动驾驶行进路径生成装置,基于多个预测路径和移动体的速度,对每个预测路径算出移动体的预测加速度。基于预测加速度与加速度阈值的比较结果,确定预测路径中的在行进路径的生成中使用的预测路径即对象路径。基于自身车辆路径和对象路径生成行进路径。像这样,通过使用基于预测加速度与加速度阈值的比较结果确定的对象路径,能够生成考虑了移动体的预测路径的实现可能性的行进路径。由此,与没有考虑移动体的预测路径的实现可能性的情况相比,能够适当地生成自动驾驶的行进路径。
7.在本发明的一技术方案的自动驾驶行进路径生成装置中,可以是,预测加速度算出部基于预测路径的曲率半径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测横向加速度,对象路径确定部将多个预测路径中的预测横向加速度的大小的最大值比横向加速度阈值小的预测路径确定为对象路径。在该情况下,能够利用可认
为移动体产生的预测横向加速度的大小的最大值为横向加速度阈值以上那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
8.在本发明的一技术方案的自动驾驶行进路径生成装置中,可以是,预测加速度算出部基于位于预测路径上的移动体的暂时停止位置或减速位置和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测纵向加速度,对象路径确定部将多个预测路径中的预测纵向加速度的大小的最大值比纵向加速度阈值小的预测路径确定为对象路径。在该情况下,能够利用可认为移动体产生的预测纵向加速度的大小的最大值为纵向加速度阈值以上那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
9.在本发明的一技术方案的自动驾驶行进路径生成装置中,可以是,地图信息包括对多个车辆确定交通法规上的优先顺位的优先顺位信息,对象路径确定部进一步将多个预测路径中的移动体的优先顺位为车辆的优先顺位以上的预测路径确定为对象路径。在该情况下,能够利用可认为移动体的优先顺位低于车辆的优先顺位那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
10.在本发明的一技术方案的自动驾驶行进路径生成装置中,可以是,移动体识别部识别移动体的方向指示显示,对象路径确定部进一步将多个预测路径中的在由方向指示显示确定的方向上延伸的预测路径确定为对象路径。在该情况下,能够利用可认为在没有由方向指示显示确定的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
11.在本发明的一技术方案的自动驾驶行进路径生成装置中,可以是,移动体识别部识别移动体的沿着与行进方向交叉的方向的横向位置的偏移,对象路径确定部进一步将多个预测路径中的在与横向位置的偏移对应的方向上延伸的预测路径确定为对象路径。在该情况下,能够利用可认为在没有与横向位置的偏移对应的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
12.本发明的另一技术方案是使车辆按照所生成的行进路径进行自动驾驶的自动驾驶装置,具备:移动体识别部,所述移动体识别部识别位于车辆的周围的移动体;路径算出部,所述路径算出部基于车辆的地图上的位置、移动体的地图上的位置及地图信息,算出车辆的自动驾驶的自身车辆路径和移动体的多个预测路径;预测加速度算出部,所述预测加速度算出部基于多个预测路径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测加速度;对象路径确定部,所述对象路径确定部基于预测加速度与加速度阈值的比较结果,确定多个预测路径中的在行进路径的生成中使用的预测路径即对象路径;行进路径生成部,所述行进路径生成部基于自身车辆路径和对象路径生成行进路径;以及行驶控制部,所述行驶控制部使车辆按照行进路径进行自动驾驶,行进路径生成部在自身车辆路径与对象路径发生干涉的情况下,算出自身车辆路径与对象路径的干涉位置,基于车辆的车速、自身车辆路径及干涉位置,生成使车辆在干涉位置之前停止那样的作为行进路径的干涉避免行进路径,行驶控制部按照干涉避免行进路径使车辆减速。
13.根据本发明的另一技术方案的自动驾驶装置,基于多个预测路径和移动体的速度,对每个预测路径算出移动体的预测加速度。基于预测加速度与加速度阈值的比较结果,确定预测路径中的在行进路径的生成中使用的预测路径即对象路径。基于自身车辆路径和
对象路径生成行进路径。像这样,通过使用基于预测加速度与加速度阈值的比较结果确定的对象路径,能够生成考虑了移动体的预测路径的实现可能性的行进路径。由此,与没有考虑移动体的预测路径的实现可能性的情况相比,能够适当地生成自动驾驶的行进路径。另外,根据本发明的另一技术方案的自动驾驶装置,在自身车辆路径与对象路径发生干涉的情况下生成干涉避免行进路径,并按照干涉避免行进路径使车辆减速。因此,使车辆在干涉位置之前停止。这样,在考虑了移动体的预测路径的实现可能性的基础上使车辆减速,因此与没有考虑移动体的预测路径的实现可能性的情况相比,能够适当地使车辆减速。
14.根据本发明的一些技术方案,能够根据位于车辆的周围的移动体的预测路径的实现可能性适当地生成自动驾驶的行进路径。
附图说明
15.以下将参照附图说明本发明的示例性实施方式的特征、优点以及技术和产业意义,在附图中相同的附图标记表示相同的要素,并且其中:
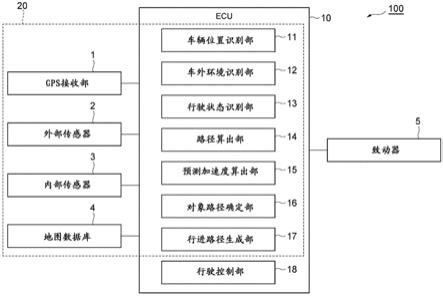
16.图1是例示具备第一实施方式的自动驾驶行进路径生成装置的自动驾驶装置的框图。
17.图2a是例示十字路口处的对向车的预测路径的示意性俯视图。
18.图2b是例示以比图2a的对向车高的车速行驶的对向车的十字路口处的预测路径的示意性俯视图。
19.图3是示出图1的ecu的自动驾驶处理的一例的流程图。
20.图4是示出图3的s05及s06的处理的一例的流程图。
21.图5是示出图3的s08及s09的处理的一例的流程图。
22.图6是例示具备第二实施方式的自动驾驶行进路径生成装置的自动驾驶装置的框图。
23.图7a是例示y字路口处的合流车的预测路径的示意性俯视图。
24.图7b是例示以比图7a的合流车低的车速行驶的合流车的y字路口处的预测路径的示意性俯视图。
25.图8是示出图6的ecu的自动驾驶处理的一例的流程图。
26.图9是示出图8的s35及s36的处理的一例的流程图。
27.图10是示出追加的对象路径确定处理的一例的流程图。
28.图11是示出追加的对象路径确定处理的其他例子的流程图。
29.图12是示出追加的对象路径确定处理的其他例子的流程图。
具体实施方式
30.以下,参照附图对本发明的实施方式进行说明。
31.[第一实施方式]
[0032]
图1所示的第一实施方式的自动驾驶行进路径生成装置20是搭载于车辆并生成车辆的自动驾驶的行进路径的装置。自动驾驶行进路径生成装置20构成使车辆按照所生成的行进路径进行自动驾驶的自动驾驶装置100的一部分。车辆的自动驾驶的行进路径[trajectory]包括车辆行驶的路径[path]和车辆的速度。在此,作为自动驾驶的行进路径,
设想在车辆(自身车辆)行驶的道路上车辆以外的移动体位于车辆的周围的状况下车辆在数秒~数分钟内将要行驶的行进路径。移动体是指位于车辆的周围的动态障碍物。作为移动体,例如可例示其他车辆、自行车、行人等。作为一例,这里的移动体是其他车辆。其他车辆可以包括乘用车、卡车、公共汽车、摩托车、自行车等各种车辆。
[0033]
自动驾驶例如是使车辆沿着车辆行驶的道路自动地行驶的驾驶状态。自动驾驶例如包括驾驶员不进行驾驶操作地使车辆朝向预先设定的目的地自动地行驶的驾驶状态。自动驾驶包括sae[society of automotive engineers:美国汽车工程师学会]j3016中的自动驾驶等级2~自动驾驶等级4。
[0034]
以下,参照附图对第一实施方式的自动驾驶行进路径生成装置20及自动驾驶装置100的构成进行说明。如图1所示,自动驾驶行进路径生成装置20具备统一管理系统的ecu[electronic control unit:电子控制单元]10。ecu10是具有cpu[central processing unit:中央处理单元]、rom[read only memory:只读存储器]、ram[random access memory:随机存取存储器]、can[controller area network:控制器局域网]通信电路等的电子控制单元。在ecu10中,例如通过将存储于rom的程序加载到ram,并由cpu执行加载到ram的程序来实现各种功能。ecu10也可以由多个电子单元构成。
[0035]
ecu10与gps接收部1、外部传感器2、内部传感器3及地图数据库4连接。
[0036]
gps接收部1通过从3个以上的gps卫星接收信号来测定车辆的位置(例如车辆的纬度及经度)。gps接收部1将测定出的车辆的位置信息向ecu10发送。
[0037]
外部传感器2是检测车辆的周边的状况的检测设备。外部传感器2包括摄像头和雷达传感器中的至少一个。外部传感器2也可以构成为能够重构车辆行驶的车外环境的各种性质(车辆的位置、与移动体的相对距离、与移动体的相对速度、移动体的朝向、车道的形状、信号灯的点亮状态等)。
[0038]
摄像头是拍摄车辆的外部状况的拍摄设备。摄像头设置于车辆的前玻璃的里侧。摄像头向ecu10发送与车辆的外部状况相关的拍摄信息。摄像头可以是单眼摄像头,也可以是立体摄像头。立体摄像头具有以再现两眼视差的方式配置的两个拍摄部。立体摄像头的拍摄信息还包括进深方向的信息。
[0039]
雷达传感器是利用电波(例如毫米波)或光检测车辆的周边的移动体的检测设备。雷达传感器例如包括毫米波雷达或激光雷达[lidar:light detection and ranging]。雷达传感器通过向车辆的周边发送电波或光,并接收由移动体反射的电波或光来检测移动体及静止物。雷达传感器将检测到的移动体信息向ecu10发送。静止物包括电线杆、建筑物、信号灯等。静止物还可以包括白线。
[0040]
内部传感器3是检测车辆的行驶状态的检测设备。内部传感器3包括车速传感器、加速度传感器及偏航率(yaw rate)传感器。车速传感器是检测车辆的速度的检测器。作为车速传感器,例如使用设置于车辆的车轮或与车轮一体旋转的驱动轴等并检测车轮的转速的车轮速度传感器。车速传感器将检测到的车速信息(车轮速度信息)向ecu10发送。
[0041]
加速度传感器是检测车辆的加速度的检测器。加速度传感器例如包括检测车辆的前后方向的加速度的前后加速度传感器和检测车辆的横向加速度的横向加速度传感器。加速度传感器例如将车辆的加速度信息向ecu10发送。偏航率传感器是检测车辆的重心绕铅直轴的偏航率(旋转角速度)的检测器。作为偏航率传感器,例如可以使用陀螺仪传感器。偏
航率传感器将检测到的车辆的偏航率信息向ecu10发送。
[0042]
地图数据库4是存储地图信息的数据库。地图数据库4例如形成在搭载于车辆的hdd[hard disk drive:硬盘驱动器]等存储介质内。地图信息包括道路的位置信息、道路形状的信息(例如弯道、直线部的类别、弯道的曲率半径、交叉路口的形状、车道的宽度等)、交叉路口及分岔路口的位置信息、以及构造物的位置信息等。作为道路形状的信息,例如能够设为将在车道的中心排列的点(例如节点)连结的直线或曲线的形状。构造物包括沿着道路设置的店铺等设施。地图信息包括与地图上的车道的位置对应的限制速度(例如法定最高速度)等的设定信息。限制速度可以是法定最高速度以下的任意速度。地图信息也可以包括与地图上的车道的位置相关联的各种交通规则信息(能够进行车道变更的区间、不能进行车道变更的区间的信息等)。此外,地图数据库4也可以形成于能够与车辆进行通信的管理中心等设施的计算机。
[0043]
致动器5是在车辆的自动驾驶控制中使用的设备。致动器5至少包括驱动致动器、制动致动器及操舵致动器。驱动致动器根据来自ecu10的控制信号来控制对发动机的空气的供给量(节气门开度),控制车辆的驱动力。此外,在车辆为混合动力车的情况下,除了对发动机的空气的供给量以外,还向作为动力源的马达输入来自ecu10的控制信号来控制该驱动力。在车辆为电动汽车的情况下,向作为动力源的马达输入来自ecu10的控制信号来控制该驱动力。这些情况下的作为动力源的马达构成致动器5。
[0044]
制动致动器根据来自ecu10的控制信号来控制制动系统,控制给予车辆的车轮的制动力。作为制动系统,例如可以使用液压制动系统。操舵致动器根据来自ecu10的控制信号来控制电动助力转向系统中的对操舵转矩进行控制的辅助马达的驱动。由此,操舵致动器控制ecu10的操舵转矩。
[0045]
接着,对ecu10的功能性构成进行说明。ecu10具有车辆位置识别部11、车外环境识别部(移动体识别部)12、行驶状态识别部13、路径算出部14、预测加速度算出部15、对象路径确定部16、行进路径生成部17及行驶控制部18。自动驾驶行进路径生成装置20至少具有车外环境识别部12、路径算出部14、预测加速度算出部15、对象路径确定部16及行进路径生成部17。
[0046]
车辆位置识别部11基于gps接收部1的位置信息及地图数据库4的地图信息,识别车辆的地图上的位置。另外,车辆位置识别部11利用地图数据库4的地图信息所包括的电线杆等固定体的位置信息及外部传感器2的检测结果,通过slam[simultaneous localization and mapping:同步定位与地图构建]技术来识别车辆的位置。除此以外,车辆位置识别部11还可以通过公知的方法来识别车辆的地图上的位置。
[0047]
车外环境识别部12基于外部传感器2的检测结果,识别车辆的车外环境。车外环境识别部12基于摄像头的拍摄信息、雷达传感器的移动体信息,通过公知的方法来识别车辆的车外环境。
[0048]
车外环境识别部12基于外部传感器2的检测结果,识别位于车辆的周围的移动体。车外环境包括移动体相对于车辆的位置、移动体相对于车辆的相对速度、移动体相对于车辆的移动方向等。车外环境识别部12基于车辆的车速和移动体的相对速度来识别移动体的速度。车外环境识别部12基于移动体相对于车辆的位置和地图信息,识别移动体的地图上的位置。车外环境识别部12也可以针对表示移动体的移动体信号,对每个移动体分配移动
体识别编号等。
[0049]
行驶状态识别部13基于内部传感器3的检测结果,识别行驶中的车辆的状态。行驶状态包括车辆的车速、车辆的加速度、车辆的偏航率。具体而言,行驶状态识别部13基于车速传感器的车速信息来识别车辆的车速。行驶状态识别部13基于加速度传感器的加速度信息,识别车辆的加速度(前后加速度及横向加速度)。行驶状态识别部13基于偏航率传感器的偏航率信息来识别车辆的偏航率。
[0050]
路径算出部14基于车辆的地图上的位置、移动体的地图上的位置及地图信息,算出车辆的自动驾驶的自身车辆路径和移动体的多个预测路径。车辆的自动驾驶的自身车辆路径是用于使车辆沿着车辆的目标路线进行自动驾驶的车辆的路径。移动体的预测路径是移动体从移动体的当前位置有可能行进的路径。预测路径例如可以是移动体在数秒~数分钟内将要行进的范围的路径。路径算出部14也可以算出预先设定的设定时间后(例如1秒后、3秒后等)的自身车辆路径及预测路径。
[0051]
路径算出部14例如基于来自gps接收部1、外部传感器2、内部传感器3及地图数据库4的信息和目标路线,运算车辆的潜在风险(risk potential)区域。路径算出部14可以通过公知的方法对潜在风险区域进行谷搜索来算出自身车辆路径。
[0052]
路径算出部14例如基于车辆的车速、车辆的位置、车辆行驶的道路的道路宽度及1个或多个目标物的位置,通过公知的方法运算车辆的潜在风险区域。目标物包括在车辆的前方检测出的固定障碍物及移动障碍物。固定障碍物例如是路面涂料(包括白线、黄线等车道边界线)、以及构造物(路缘石、柱、电线杆、建筑物、标识、树等)。移动障碍物例如是行人、自行车、婴儿车及其他车辆等。
[0053]
路径算出部14例如基于地图信息和车外环境,算出移动体的预测路径。移动体的预测路径可以包括与移动体的周围的道路环境相应的多个路径。路径算出部14例如将移动体行驶的道路的前方的交叉路口形状、位于移动体的周围的店铺等设施的停车场等作为目的地,算出移动体从当前位置有可能行进的1个或多个路径作为预测路径。
[0054]
图2a是例示十字路口处的对向车的预测路径的示意性俯视图。图2b是例示以比图2a的对向车高的车速行驶的对向车的十字路口处的预测路径的示意性俯视图。在图2a中,作为移动体的一例,示出了作为相对于自身车辆v1的对向车的其他车辆v2。在图2b中,作为以比图2a的对向车高的车速行驶的对向车,示出了其他车辆v3。
[0055]
如图2a及图2b所示,自身车辆v1、其他车辆v2及其他车辆v3即将来到十字路口rx。在图2a及图2b的例子中,路径算出部14基于自身车辆v1的地图上的位置和地图信息,算出自身车辆路径p1a作为自身车辆v1的自动驾驶的自身车辆路径。自身车辆路径p1a是从道路r1向道路r3的自身车辆v1的直行路径。
[0056]
在图2a的例子中,路径算出部14算出预测路径p2a、预测路径p2b及预测路径p2c作为其他车辆v2的预测路径。预测路径p2a是从道路r3向道路r1的其他车辆v2的直行路径。预测路径p2b是从道路r3向道路r4的其他车辆v2的左转路径。预测路径p2c是从道路r3向道路r2的其他车辆v2的右转路径。
[0057]
在图2b的例子中,路径算出部14算出预测路径p3a、预测路径p3b及预测路径p3c作为其他车辆v3的预测路径。预测路径p3a是从道路r3向道路r1的其他车辆v3的直行路径。预测路径p3b是从道路r3向道路r4的其他车辆v3的左转路径。预测路径p3c是从道路r3向道路
r2的其他车辆v3的右转路径。
[0058]
在此,移动体的预测路径包括根据移动体的速度等举动而物理上实现可能性低的路径和无法按照移动体应该遵守的交通法规行进的路径。如后所述,由于这些路径不被确定为对象路径,因此不在车辆的行进路径的生成中使用。在图2a及图2b的例子中,其他车辆v3以比其他车辆v2高的车速行驶。其他车辆v2的车速是能够沿着预测路径p2b、p2c行驶的车速。但是,其他车辆v3的车速快到在现实中难以沿着预测路径p3b、p3c行驶的程度。由此,预测路径p3b、p3c是实现可能性低的路径。
[0059]
预测加速度算出部15基于多个预测路径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测加速度。预测加速度是在移动体沿着预测路径移动时预测移动体所产生的加速度。预测加速度根据移动体的速度而变化。
[0060]
预测加速度算出部15也可以识别移动体的种类(例如乘用车、卡车、公共汽车、摩托车、自行车、行人等),根据移动体的种类,通过预先准备的运动模型算出预测加速度。预测加速度算出部15也可以采用与车辆及行人的举动预测相关的公知的各种技术来算出移动体的预测加速度。预测加速度算出部15也可以将作为预测对象的移动体限定为道路上的移动体。在该情况下,预测加速度算出部15也可以将移动体假定为车辆来进行举动预测的运算。
[0061]
预测加速度能够包括预测横向加速度和预测纵向加速度。预测横向加速度是在移动体沿着弯曲的预测路径移动时预测移动体所产生的横向的加速度。横向是指移动体的车宽方向。
[0062]
这里的预测加速度算出部15算出预测横向加速度作为预测加速度。预测加速度算出部15基于预测路径的曲率半径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测横向加速度。在图2a的例子中,预测加速度算出部15根据预测路径p2b、p2c的弯曲区间处的预测路径的曲率半径和其他车辆v2的车速算出其他车辆v2产生的离心力作为预测横向加速度。在图2b的例子中,预测加速度算出部15根据预测路径p3b、p3c的弯曲区间处的预测路径的曲率半径和其他车辆v3的车速算出其他车辆v3产生的离心力作为预测横向加速度。
[0063]
对象路径确定部16基于预测加速度与加速度阈值的比较结果来确定对象路径。对象路径是多个预测路径中的在行进路径的生成中使用的预测路径。这里的对象路径确定部16将多个预测路径中的预测横向加速度的大小的最大值比横向加速度阈值小的预测路径确定为对象路径。
[0064]
横向加速度阈值是用于判定移动体的预测路径是否是物理上实现可能性低的路径的预测横向加速度的阈值。横向加速度阈值也可以是预先设定的参数或映射等。横向加速度阈值也可以根据预测路径的曲率半径来设定。例如,横向加速度阈值能够设定为预测路径的曲率半径越小,则阈值越大。另外,横向加速度阈值也可以根据移动体的种类来设定。
[0065]
具体而言,对象路径确定部16也可以判定预测横向加速度的大小的最大值是否小于横向加速度阈值。对象路径确定部16在判定为预测横向加速度的大小的最大值小于横向加速度阈值的情况下,将该预测路径确定为对象路径。对象路径确定部16在判定为预测横向加速度的大小的最大值为横向加速度阈值以上的情况下,不将该预测路径确定为对象路
径。此外,“不确定为对象路径”包括例如在使用与潜在风险区域相应的概率值来评价多个路径的情况下因概率值足够小而实质上不被确定的情况。
[0066]
在图2a的例子中,对象路径确定部16判定为关于预测路径p2a、p2b、p2c的预测横向加速度的大小的最大值小于横向加速度阈值。对象路径确定部16将预测路径p2a、p2b、p2c确定为对象路径。
[0067]
在图2b的例子中,对象路径确定部16判定为关于预测路径p3a的预测横向加速度的大小的最大值小于横向加速度阈值,并且判定为关于预测路径p3b、p3c的预测横向加速度的大小的最大值为横向加速度阈值以上。对象路径确定部16将预测路径p3a确定为对象路径。另一方面,对象路径确定部16不将预测路径p3b、p3c确定为对象路径。
[0068]
行进路径生成部17基于自身车辆路径和对象路径生成行进路径。行进路径生成部17例如以车辆与移动体不发生相互碰撞的方式生成行进路径。
[0069]
作为一例,行进路径生成部17判定自身车辆路径与对象路径是否发生干涉。行进路径生成部17在判定为自身车辆路径与对象路径发生干涉的情况下,生成干涉避免的第一行进路径(干涉避免行进路径)。第一行进路径是不使车辆与移动体发生相互碰撞那样的行进路径。第一行进路径例如能够设为使车辆在干涉位置之前停止那样的行进路径。行进路径生成部17在自身车辆路径与对象路径发生干涉的情况下,算出自身车辆路径与对象路径的干涉位置。行进路径生成部17基于车辆的车速、自身车辆路径及干涉位置,生成第一行进路径。行进路径生成部17例如按照使沿着自身车辆路径行驶的车辆减速并在干涉位置之前停止那样的速度计划进行第一行进路径的生成。
[0070]
行进路径生成部17在判定为自身车辆路径与对象路径不发生干涉的情况下,生成第二行进路径。第二行进路径是不伴随对移动体的避免动作的车辆的行进路径。第二行进路径例如能够设为使车辆沿着自身车辆路径行驶的行进路径。
[0071]
行驶控制部18按照由行进路径生成部17生成的行进路径使车辆进行自动驾驶。行驶控制部18控制致动器5,以使车辆按照由行进路径生成部17生成的行进路径进行行驶。例如,行驶控制部18,在判定为自身车辆路径与对象路径发生干涉的情况下,按照第一行进路径控制车辆的行驶,使其在干涉位置之前停止。行驶控制部18,在判定为自身车辆路径与对象路径不发生干涉的情况下,按照第二行进路径控制车辆的行驶,使其沿着自身车辆路径行驶。
[0072]
在图2a的例子中,确定为对象路径的预测路径p2a、p2b、p2c中的预测路径p2c与自身车辆路径p1a发生干涉。由此,ecu10判定为自身车辆路径与对象路径发生干涉。行进路径生成部17取得自身车辆路径p1a与预测路径p2c交叉的位置的地图上的坐标作为干涉位置。行进路径生成部17基于自身车辆路径p1a与预测路径p2c的干涉位置、自身车辆v1的地图上的位置及自身车辆v1的车速,取得干涉时刻。行进路径生成部17按照使沿着自身车辆路径p1a行驶的自身车辆v1减速并在干涉位置之前停止那样的速度计划进行第一行进路径的生成。行驶控制部18控制致动器5,以使自身车辆v1按照第一行进路径在干涉位置之前停止。
[0073]
在图2b的例子中,确定为对象路径的预测路径p3a与自身车辆路径p1a不发生干涉,预测路径p3b、p3c没有被确定为对象路径。由此,ecu10判定为自身车辆路径与对象路径不发生干涉。行进路径生成部17进行沿着自身车辆路径p1a的第二行进路径的生成。行驶控制部18控制致动器5,以使自身车辆v1按照第二行进路径沿着自身车辆路径p1a行驶。
[0074]
接着,参照附图对自动驾驶行进路径生成装置20及自动驾驶装置100的ecu10的处理进行说明。
[0075]
参照图3对ecu10的处理进行说明。图3是示出图1的ecu10的自动驾驶处理的一例的流程图。图3所示的流程图例如在自动驾驶中执行。
[0076]
如图3所示,作为s01,自动驾驶行进路径生成装置20及自动驾驶装置100的ecu10通过车辆位置识别部11进行车辆的地图上的位置的识别。车辆位置识别部11基于gps接收部1的位置信息及地图数据库4的地图信息,识别车辆的地图上的位置。
[0077]
在s02中,ecu10通过行驶状态识别部13进行车辆的行驶状态的识别。行驶状态识别部13基于内部传感器3的检测结果,至少识别车辆的车速作为行驶中的车辆的行驶状态。
[0078]
在s03中,ecu10通过车外环境识别部12进行移动体的识别。车外环境识别部12基于外部传感器2的检测结果,识别车辆的车外环境,并且识别移动体。车外环境识别部12例如将移动体相对于车辆的位置、移动体相对于车辆的相对速度、以及移动体相对于车辆的移动方向识别为车外环境。车外环境识别部12基于车辆的车速和移动体的相对速度来识别移动体的速度。车外环境识别部12基于移动体相对于车辆的位置和地图信息,识别移动体的地图上的位置。
[0079]
在s04中,ecu10通过路径算出部14进行移动体的多个预测路径的算出。路径算出部14基于移动体的地图上的位置和地图信息,算出移动体的多个预测路径。在图2a的例子中,路径算出部14算出预测路径p2a、p2b、p2c作为多个预测路径。
[0080]
在s05中,ecu10通过预测加速度算出部15进行每个预测路径的预测加速度的算出。预测加速度算出部15基于多个预测路径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测加速度。在s06中,ecu10通过对象路径确定部16进行对象路径的确定。对象路径确定部16基于预测加速度与加速度阈值的比较结果来确定对象路径。在s05及s06中,ecu10具体进行图4所示的处理。
[0081]
图4是示出图3的s05及s06的处理的一例的流程图。图4所示的流程图例如在自动驾驶中在图1的ecu的处理中执行。图4的处理也可以在存在多个预测路径的情况下,对每个预测路径反复执行。
[0082]
如图4所示,ecu10对每个预测路径进行s11的处理作为上述s05的处理。在s11中,ecu10通过预测加速度算出部15,基于预测路径的曲率半径和移动体的速度,对每个预测路径算出预测横向加速度。预测加速度算出部15例如根据预测路径p2b、p2c的弯曲区间处的预测路径的曲率半径和移动体的速度算出移动体产生的离心力作为预测横向加速度。
[0083]
ecu10对每个预测路径进行s12~s14的处理作为上述s06的处理。在s12中,ecu10通过对象路径确定部16判定预测横向加速度的大小的最大值是否小于横向加速度阈值。ecu10在判定为预测横向加速度的大小的最大值小于横向加速度阈值的情况下(s12:是),移向s13的处理。ecu10在判定为预测横向加速度的大小的最大值为横向加速度阈值以上的情况下(s12:否),移向s14的处理。
[0084]
在s13中,ecu10通过对象路径确定部16将预测路径确定为对象路径。另一方面,在s14中,ecu10通过对象路径确定部16不将预测路径确定为对象路径。
[0085]
ecu10在上述s13或s14的处理之后,结束图4的处理,移向图3的s07的处理。
[0086]
在s07中,ecu10通过路径算出部14进行车辆的自身车辆路径的算出。路径算出部
14基于车辆的地图上的位置和地图信息,算出车辆的自动驾驶的自身车辆路径。在图2a及图2b的例子中,路径算出部14算出自身车辆路径p1a作为自身车辆路径。
[0087]
在s08中,ecu10通过行进路径生成部17进行车辆的自动驾驶的行进路径的生成。行进路径生成部17基于自身车辆路径和对象路径生成行进路径。在s09中,ecu10通过行驶控制部18进行车辆的行驶的控制。行驶控制部18控制致动器5,以使车辆按照由行进路径生成部17生成的行进路径行驶。在s08及s09中,ecu10具体进行图5所示的处理。
[0088]
图5是示出图3的s08及s09的处理的一例的流程图。图5所示的流程图例如在自动驾驶中在图1的ecu的处理中执行。
[0089]
如图5所示,在s21中,ecu10通过行进路径生成部17判定自身车辆路径与对象路径是否发生干涉。ecu10在判定为自身车辆路径与对象路径发生干涉的情况下(s21:是),移向s22的处理。ecu10在判定为自身车辆路径与对象路径不发生干涉的情况下(s21:否),移向s25的处理。在s21中,例如在确定了多个对象路径的情况下至少1个对象路径与自身车辆路径发生干涉时,ecu10可以判定为自身车辆路径与对象路径发生干涉。
[0090]
在s22中,ecu10通过行进路径生成部17进行干涉位置及干涉时刻的取得。在s23中,ecu10通过行进路径生成部17进行车辆的干涉避免的第一行进路径的生成。在s24中,ecu10通过行驶控制部18按照第一行进路径控制车辆的行驶,使其在干涉位置之前停止。ecu10在s24的处理之后,结束图5的处理,移向图3的处理,并且结束图3的处理。
[0091]
另一方面,在s25中,ecu10通过行进路径生成部17进行沿着自身车辆路径p1a的第二行进路径的生成。在s26中,ecu10通过行驶控制部18按照第二行进路径控制车辆的行驶,并使其沿着自身车辆路径p1a行驶。ecu10在s26的处理之后,结束图5的处理,移向图3的处理,并且结束图3的处理。
[0092]
如以上说明的那样,根据第一实施方式的自动驾驶行进路径生成装置20,基于多个预测路径和移动体的速度,对每个预测路径算出移动体的预测加速度。基于预测加速度与加速度阈值的比较结果,确定预测路径中的在行进路径的生成中使用的预测路径即对象路径。基于自身车辆路径和对象路径生成行进路径。这样,通过使用基于预测加速度与加速度阈值的比较结果确定的对象路径,能够生成考虑了移动体的预测路径的实现可能性的行进路径。由此,与没有考虑移动体的预测路径的实现可能性的情况相比,能够适当地生成自动驾驶的行进路径。
[0093]
在自动驾驶行进路径生成装置20中,预测加速度算出部15基于预测路径的曲率半径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测横向加速度。对象路径确定部16将多个预测路径中的预测横向加速度的大小的最大值比横向加速度阈值小的预测路径确定为对象路径。由此,能够利用可认为移动体产生的预测横向加速度的大小的最大值为横向加速度阈值以上那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0094]
根据第一实施方式的自动驾驶装置100,基于多个预测路径和移动体的速度,对每个预测路径算出移动体的预测加速度。基于预测加速度与加速度阈值的比较结果,确定预测路径中的在行进路径的生成中使用的预测路径即对象路径。基于自身车辆路径和对象路径生成行进路径。这样,通过使用基于预测加速度与加速度阈值的比较结果确定的对象路径,能够生成考虑了移动体的预测路径的实现可能性的行进路径。因此,与没有考虑移动体
的预测路径的实现可能性的情况相比,能够适当地生成自动驾驶的行进路径。另外,根据自动驾驶装置100,在自身车辆路径与对象路径发生干涉的情况下生成干涉避免的第一行进路径(干涉避免行进路径),并按照第一行进路径使车辆减速。因此,能够使车辆在干涉位置之前停止。这样,由于在考虑了移动体的预测路径的实现可能性的基础上使车辆减速,因此与没有考虑移动体的预测路径的实现可能性的情况相比,能够适当地使车辆减速。
[0095]
此外,为了避免和与自身车辆路径发生干涉的预测路径上的移动体的碰撞而在车辆中需要紧急减速,但不将移动体实际上无法行驶那样的预测路径作为对象路径。由此,不生成针对这样的与自身车辆路径发生干涉但缺乏实现可能性的预测路径的车辆的行进路径,所以车辆不需要进行不必要的紧急减速。由此,能够抑制因不必要的急剧减速而车辆的行驶效率降低或燃料经济性恶化的情况。
[0096]
[第二实施方式]
[0097]
接着,参照附图对第二实施方式的自动驾驶行进路径生成装置20a及自动驾驶装置100a进行说明。图6是示出第二实施方式的自动驾驶行进路径生成装置的框图。图6所示的自动驾驶行进路径生成装置20a及自动驾驶装置100a与第一实施方式相比在以下方面不同:代替预测横向加速度而使用预测纵向加速度作为预测加速度;以及考虑交通法规上的优先顺位来确定对象路径。此外,对与第一实施方式相同或相当的构成标注相同的附图标记并省略说明。
[0098]
如图6所示,第二实施方式的自动驾驶行进路径生成装置20a及自动驾驶装置100a具备地图数据库4a来代替地图数据库4,具备具有预测加速度算出部15a及对象路径确定部16a的ecu10a。
[0099]
地图数据库4a基本上与地图数据库4同样地构成。地图数据库4a还存储有确定关于道路上的多个车辆的交通法规上的优先顺位的优先顺位信息作为地图信息。交通法规上的优先顺位能够列举关于位于在交叉路口处相互交叉的道路上的车辆的优先顺位、关于其他道路与一方的道路合流的情况下的位于各道路上的车辆的优先顺位、以及关于位于相邻车道的车辆的优先顺位等。
[0100]
图7a是例示y字路口处的合流车的预测路径的示意性俯视图。图7b是例示比图7a的合流车快地行驶的合流车的y字路口处的预测路径的示意性俯视图。在图7a中,作为移动体的一例,示出了作为将要与自身车辆v1行驶的道路r5合流的合流车的其他车辆v4。在图7b中,示出了其他车辆v5作为以比图7a的合流车低的车速行驶的合流车。
[0101]
路径算出部14与第一实施方式同样地发挥功能。如图7a及图7b所示,自身车辆v1、其他车辆v4及其他车辆v5即将来到y字路口ry。在图7a及图7b的例子中,路径算出部14基于自身车辆v1的地图上的位置和地图信息,算出自身车辆路径p1b作为自身车辆v1的自动驾驶的自身车辆路径。自身车辆路径p1b是从道路r5向道路r6的自身车辆v1的直行路径。
[0102]
在图7a的例子中,路径算出部14算出预测路径p4a及预测路径p4b作为其他车辆v4的预测路径。预测路径p4a是在设置于道路r7的停止线(暂时停止位置)sl暂时停止后向道路r6合流的其他车辆v4的合流路径。预测路径p4b是不在停止线sl暂时停止而向道路r6合流的其他车辆v4的合流路径。在图7b的例子中,路径算出部14算出预测路径p5a及预测路径p5b作为其他车辆v5的预测路径。预测路径p5a是在设置于道路r7的停止线sl暂时停止后向道路r6合流的其他车辆v5的合流路径。预测路径p5b是不在停止线sl暂时停止而向道路r6
合流的其他车辆v5的合流路径。
[0103]
预测加速度算出部15a算出预测纵向加速度作为预测加速度。预测纵向加速度是在移动体沿着预测路径加速或减速时预测移动体所产生的纵向的加速度。纵向是指移动体的行进方向。
[0104]
预测加速度算出部15a基于位于预测路径上的移动体的暂时停止位置或减速位置和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测纵向加速度。暂时停止位置是在交通法规上或交通社会通用观念上认为移动体应该暂时停止的位置。作为暂时停止位置,例如可列举停止线的位置、交叉道口的跟前的预定的位置、沿着道路的设施的出入口的位置等。减速位置是指在交通法规上或交通社会通用观念上认为移动体应该降低速度的位置。作为减速位置,例如可列举限制车速变更为更低的车速的位置、从直线路进入弯道路的跟前的预定位置等。
[0105]
在图7a的例子中,预测加速度算出部15a基于位于预测路径p4a上的停止线sl的位置和其他车辆v4的车速,算出在以沿着预测路径p4a行驶并且在停止线sl停止的方式减速时其他车辆v4所产生的负的加速度的预测值作为预测纵向加速度。另外,预测加速度算出部15a基于位于预测路径p4b上的减速位置(例如合流时慢行的位置)和其他车辆v4的车速,算出在沿着预测路径p4b行驶且慢行时其他车辆v4所产生的负的加速度的预测值作为预测纵向加速度。
[0106]
在图7b的例子中,预测加速度算出部15a基于位于预测路径p5a上的停止线sl的位置和其他车辆v5的车速,算出在以沿着预测路径p5a行驶并且在停止线sl停止的方式减速时其他车辆v5所产生的负的加速度的预测值作为预测纵向加速度。另外,预测加速度算出部15a基于位于预测路径p5b上的减速位置和其他车辆v5的车速,算出在沿着预测路径p5b行驶且慢行时其他车辆v5所产生的负的加速度的预测值作为预测纵向加速度。
[0107]
对象路径确定部16a将多个预测路径中的预测纵向加速度的大小的最大值比纵向加速度阈值小的预测路径确定为对象路径。
[0108]
纵向加速度阈值是用于判定移动体的预测路径是否是物理上实现可能性低的路径的预测纵向加速度的阈值。纵向加速度阈值也可以是预先设定的参数或映射等。纵向加速度阈值也可以根据需要减速的道路的状况来设定。例如,纵向加速度阈值能够设定为,在移动体应该在暂时停止位置停止的情况下,与移动体应该在减速位置减速的情况相比阈值大。另外,纵向加速度阈值也可以根据移动体的种类来设定。
[0109]
具体而言,对象路径确定部16a也可以判定预测纵向加速度的大小的最大值是否小于纵向加速度阈值。对象路径确定部16a在判定为预测纵向加速度的大小的最大值小于纵向加速度阈值的情况下,将该预测路径确定为对象路径。对象路径确定部16a在判定为预测纵向加速度的大小的最大值为纵向加速度阈值以上的情况下,不将该预测路径确定为对象路径。此外,在对象路径确定部16a的上述判定中,也可以使用带正负符号的值作为预测纵向加速度,并且纵向加速度阈值也使用带对应的正负符号的阈值。
[0110]
在此,在图7a及图7b中,根据接近y字路口ry的自身车辆v1与其他车辆v4、v5的关系,在交通法规上,其他车辆v4、v5应该在停止线sl暂时停止。其他车辆v5以比其他车辆v4低的车速行驶。其他车辆v5的车速是能够进行在停止线sl的暂时停止的车速。但是,其他车辆v4的车速快到在现实中难以进行在停止线sl的暂时停止的程度。在该情况下,在图7a中,
其他车辆v4不得不在预测路径p4b的路径上行驶,预测路径p4a的实现可能性比预测路径p4b的实现可能性低。因此,对象路径确定部16a判定为关于预测路径p4b的预测纵向加速度的大小的最大值小于纵向加速度阈值,并且判定为关于预测路径p4a的预测纵向加速度的大小的最大值为纵向加速度阈值以上。对象路径确定部16a将预测路径p4b确定为对象路径。另一方面,对象路径确定部16a不将预测路径p4a确定为对象路径。
[0111]
对象路径确定部16a也可以进一步确定多个预测路径中的移动体的优先顺位为车辆的优先顺位以上的对象路径。具体而言,对象路径确定部16a基于车辆的地图上的位置、移动体的地图上的位置及地图信息,取得车辆与移动体的关系中的车辆的优先顺位和移动体的优先顺位作为优先顺位信息。优先顺位例如能够设为根据车辆及移动体即将来到的交叉路口处的交通法规上的优先顺位而从1起依次分配给车辆及全部的移动体的数字。
[0112]
对象路径确定部16a也可以判定移动体的优先顺位是否为车辆的优先顺位以上。对象路径确定部16a在判定为移动体的优先顺位为车辆的优先顺位以上的情况下,将该预测路径确定为对象路径。对象路径确定部16a在判定为移动体的优先顺位低于车辆的优先顺位的情况下,不将该预测路径确定为对象路径。
[0113]
在图7b中,其他车辆v5的车速是能够进行在停止线sl的暂时停止的车速。由此,对象路径确定部16a判定为关于预测路径p5a、p5b的预测纵向加速度的大小的最大值小于纵向加速度阈值。对象路径确定部16a将预测路径p5a、p5b确定为对象路径。对象路径确定部16a在所确定的对象路径(预测路径)的数量为2以上的情况下,进一步确定多个预测路径中的移动体的优先顺位为车辆的优先顺位以上的对象路径。对象路径确定部16a也可以对所确定的对象路径中的进入车辆行驶的道路的预测路径或进入车辆即将来到的交叉路口的预测路径,进行使用了优先顺位信息的对象路径的确定。
[0114]
在图7b的例子中,自身车辆v1的优先顺位为1,其他车辆v5的优先顺位为2。即,其他车辆v5的优先顺位比自身车辆v1的优先顺位低。对象路径确定部16a判定为其他车辆v5的优先顺位低于自身车辆v1的优先顺位。对象路径确定部16a不将进入自身车辆v1即将来到的y字路口ry的预测路径即预测路径p5b确定为对象路径。结果,对象路径确定部16a将剩余的预测路径p5a确定为对象路径。
[0115]
顺便一提,对象路径确定部16a在所确定的对象路径(预测路径)的数量为1个的情况下,也可以省略使用了优先顺位信息的对象路径的确定。在图7a的例子中,通过使用了预测纵向加速度的对象路径的确定将预测路径缩小为1个,因此省略使用了优先顺位信息的对象路径的确定。
[0116]
接着,参照附图对自动驾驶行进路径生成装置20a及自动驾驶装置100a的ecu10a的处理进行说明。
[0117]
参照图8对ecu10a的处理进行说明。图8是示出图6的ecu10a的自动驾驶处理的一例的流程图。图8所示的流程图例如在自动驾驶中执行。
[0118]
如图8所示,ecu10a的自动驾驶处理基本上与图3的ecu10的自动驾驶处理相同。ecu10a的自动驾驶处理在s35及s36中与图3的ecu10的自动驾驶处理不同。因此,以下对这些处理进行说明。
[0119]
自动驾驶行进路径生成装置20a及自动驾驶装置100a的ecu10a在s35中,ecu10a通过预测加速度算出部15a进行每个预测路径的预测加速度的算出。预测加速度算出部15a基
于多个预测路径和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测加速度。在s36中,ecu10a通过对象路径确定部16a进行对象路径的确定。对象路径确定部16a基于预测加速度与加速度阈值的比较结果来确定对象路径。在s35及s36中,ecu10a具体进行图9及图10所示的处理。
[0120]
图9是示出图8的s35及s36的处理的一例的流程图。图9所示的流程图例如在自动驾驶中在图8的ecu的处理中执行。在存在多个预测路径的情况下,图8的处理也可以对每个预测路径反复执行。
[0121]
如图9所示,ecu10a对每个预测路径进行s41的处理作为上述s35的处理。在s41中,ecu10a通过预测加速度算出部15a,基于位于预测路径上的移动体的暂时停止位置或减速位置和移动体的速度,对每个预测路径算出预测纵向加速度。预测加速度算出部15a例如算出在预测路径p4a、p5a中伴随于用于在停止线sl暂时停止的减速而其他车辆v4、v5所产生的加速度作为预测纵向加速度。
[0122]
ecu10a对每个预测路径进行s42~s44的处理作为上述s36的处理。在s42中,ecu10a通过对象路径确定部16a判定预测纵向加速度的大小的最大值是否小于纵向加速度阈值。ecu10a在判定为预测纵向加速度的大小的最大值小于纵向加速度阈值的情况下(s42:是),移向s43的处理。ecu10a在判定为预测纵向加速度的大小的最大值为纵向加速度阈值以上的情况下(s42:否),移向s44的处理。
[0123]
在s43中,ecu10a通过对象路径确定部16a将预测路径确定为对象路径。另一方面,在s44中,ecu10a通过对象路径确定部16a不将预测路径确定为对象路径。
[0124]
ecu10a在上述s43或s44的处理之后,结束图9的处理。ecu10a在所确定的对象路径的数量为2以上的情况下,移向图10的s51的处理。ecu10a在所确定的对象路径的数量为1的情况下,省略图10的处理,移向图8的s37的处理。
[0125]
图10是示出追加的对象路径确定处理的一例的流程图。图10所示的流程图例如在自动驾驶中在图8的ecu的处理中作为对s36的处理的追加处理而执行。图10的处理也可以对多个预测路径中的每一个反复执行。
[0126]
如图10所示,ecu10a能够对每个预测路径进行s51~s54的处理作为上述s36的追加处理。在s51中,ecu10a通过对象路径确定部16a进行优先顺位信息的取得。对象路径确定部16a例如基于车辆的地图上的位置、移动体的地图上的位置及地图信息,取得车辆与移动体的关系中的车辆的优先顺位和移动体的优先顺位作为优先顺位信息。
[0127]
在s52中,ecu10a通过对象路径确定部16a判定移动体的优先顺位是否为车辆的优先顺位以上。ecu10a在判定为移动体的优先顺位为车辆的优先顺位以上的情况下(s52:是),移向s53的处理。ecu10a在判定为移动体的优先顺位低于车辆的优先顺位的情况下(s52:否),移向s54的处理。
[0128]
在s53中,ecu10a通过对象路径确定部16a将预测路径确定为对象路径。另一方面,在s54中,ecu10a通过对象路径确定部16a不将预测路径确定为对象路径。在s53或s54的处理之后,ecu10a结束图10的处理,并移向图8的s37的处理。
[0129]
如以上说明的那样,根据第二实施方式的自动驾驶行进路径生成装置20a,预测加速度算出部15a基于位于预测路径上的移动体的暂时停止位置或减速位置和移动体的速度,对每个预测路径算出沿着预测路径移动的移动体产生的预测纵向加速度。对象路径确
定部16a将多个预测路径中的预测纵向加速度的大小的最大值比纵向加速度阈值小的预测路径确定为对象路径。由此,能够利用可认为移动体所产生的预测纵向加速度的大小的最大值为纵向加速度阈值以上那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0130]
在自动驾驶行进路径生成装置20a中,地图信息包括对多个车辆确定交通法规上的优先顺位的优先顺位信息。对象路径确定部16a进一步确定多个预测路径中的移动体的优先顺位为车辆的优先顺位以上的对象路径。由此,能够利用可认为移动体的优先顺位低于车辆的优先顺位那样的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0131]
[变形例]
[0132]
以上,对本发明的优选实施方式进行了说明,但本发明并不限定于上述的实施方式。本发明以上述的实施方式为代表,能够以基于本领域技术人员的知识进行了各种变更、改良的各种方式来实施。
[0133]
例如,对象路径确定部16、16a也可以进一步确定多个预测路径中的、在由方向指示显示确定的方向上延伸的对象路径。在该情况下,由车外环境识别部12识别的车外环境还可以包括移动体的方向指示显示。方向指示显示是用于向周围示出移动体预定行进的方向的显示。车外环境识别部12也可以基于包括移动体的摄像头的拍摄图像来识别方向指示显示。方向指示显示例如是其他车辆的方向指示灯的闪烁显示。此外,方向指示显示也可以是手信号显示。
[0134]
ecu10、10a例如也可以在图4的处理、图9的处理或图10的处理中所确定的对象路径的数量为2以上的情况下,移向图11的s61的处理。图11是示出追加的对象路径确定处理的其他例子的流程图。图11的处理也可以对多个预测路径中的每一个反复执行。
[0135]
如图11所示,在s61中,ecu10、10a通过车外环境识别部12进行方向指示信息的取得。车外环境识别部12例如基于包括移动体的摄像头的拍摄图像,取得方向指示显示。
[0136]
在s62中,ecu10、10a通过对象路径确定部16、16a判定预测路径是否在由方向指示显示确定的方向上延伸。ecu10、10a在判定为预测路径在由方向指示显示确定的方向上延伸的情况下(s62:是),移向s63的处理。ecu10、10a在判定为预测路径没有在由方向指示显示确定的方向上延伸的情况下(s62:否),移向s64的处理。
[0137]
在s63中,ecu10、10a通过对象路径确定部16、16a将预测路径确定为对象路径。另一方面,在s64中,ecu10、10a通过对象路径确定部16、16a不将预测路径确定为对象路径。ecu10、10a在s63或s64的处理之后,结束图11的处理,移向图3的s07的处理或图8的s37的处理。
[0138]
这样,车外环境识别部12识别移动体的方向指示显示,并且对象路径确定部16、16a进一步将多个预测路径中的在由方向指示显示确定的方向上延伸的预测路径确定为对象路径。由此,能够利用可认为在没有由方向指示显示确定的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0139]
另外,例如,对象路径确定部16、16a也可以进一步确定多个预测路径中的在与横向位置的偏移对应的方向上延伸的对象路径。在该情况下,由车外环境识别部12识别的车外环境还可以包括移动体的横向位置的偏移。横向位置是指移动体行驶的道路的道路宽度
方向上的移动体的位置。在设想例如在对向车道上行驶的其他车辆作为移动体的情况下,横向位置也可以是其他车辆行驶的对向车道的车道宽度方向上的车辆的位置。车道宽度方向是指在道路的路面上相对于形成道路的车道的白线正交的方向。横向位置的偏移是指,移动体的横向位置相对于该移动体行驶的道路的道路宽度方向整体的偏移。车外环境识别部12也可以基于移动体的横向位置接近该移动体行驶的道路的道路宽度方向的一对端部中的哪一个来识别横向位置的偏移。在设想例如在对向车道上行驶的其他车辆作为移动体的情况下,通过对向车道中的移动体的横向位置接近中央线这一情况,能够预测移动体有可能以跨越到车辆行驶的车道的方式或者以朝向车辆行驶的车道超出的方式预定行进。
[0140]
ecu10、10a例如也可以在图4的处理、图9的处理、图10的处理或图11的处理中所确定的对象路径的数量为2以上的情况下,移向图12的s71的处理。图12是示出追加的对象路径确定处理的其他例子的流程图。图12的处理也可以对多个预测路径中的每一个反复执行。
[0141]
如图12所示,在s71中,ecu10、10a通过车外环境识别部12进行横向位置的偏移的识别。车外环境识别部12例如基于包括移动体的摄像头的拍摄图像来识别横向位置的偏移。
[0142]
在s72中,ecu10、10a通过对象路径确定部16、16a判定预测路径是否在与横向位置的偏移对应的方向上延伸。ecu10、10a在判定为预测路径在与横向位置的偏移对应的方向上延伸的情况下(s72:是),移向s73的处理。ecu10、10a在判定为预测路径没有在与横向位置的偏移对应的方向上延伸的情况下(s72:否),移向s74的处理。
[0143]
在s73中,ecu10、10a通过对象路径确定部16、16a将预测路径确定为对象路径。另一方面,在s74中,ecu10、10a通过对象路径确定部16、16a不将预测路径确定为对象路径。ecu10、10a在s73或s74的处理之后,结束图12的处理,移向图3的s07的处理或图8的s37的处理。
[0144]
这样,车外环境识别部12识别移动体的沿着与行进方向交叉的方向的横向位置的偏移,对象路径确定部16、16a进一步确定多个预测路径中的在与横向位置的偏移对应的方向上延伸的对象路径。由此,能够利用可认为在没有与横向位置的偏移对应的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0145]
另外,例如,对象路径确定部16、16a也可以基于多个预测路径中的信号灯的点亮状态的识别结果来进一步确定对象路径。在该情况下,由车外环境识别部12识别的车外环境还可以包括信号灯的点亮状态的识别结果。车外环境识别部12例如也可以基于外部传感器2的摄像头的图像,识别车辆的前方的信号灯的点亮状态(是能够通过的点亮状态还是禁止通过的点亮状态等)。车外环境识别部12也可以基于能够经由通信部取得的基础设施信息,识别信号灯的点亮状态。对象路径确定部16、16a也可以判定预测路径是否在信号灯的点亮状态为能够通过的点亮状态的方向上延伸。对象路径确定部16、16a也可以在判定为预测路径在信号灯的点亮状态为能够通过的点亮状态的方向上延伸的情况下,将该预测路径确定为对象路径。另一方面,对象路径确定部16、16a也可以在判定为预测路径在信号灯的点亮状态为禁止通过的点亮状态的方向上延伸的情况下,不将预测路径确定为对象路径。
[0146]
这样,车外环境识别部12识别信号灯的点亮状态,对象路径确定部16、16a进一步将多个预测路径中的在信号灯的点亮状态为能够通过的点亮状态的方向上延伸的预测路
径确定为对象路径。由此,能够利用可认为在信号灯的点亮状态为禁止通过的点亮状态的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0147]
另外,例如,对象路径确定部16、16a也可以基于多个预测路径中的车辆所处的道路是否为单向通行来进一步确定对象路径。在移动体的预测路径在车辆所处的道路上延伸的情况下,移动体成为单向通行的逆行,可认为该预测路径的实现可能性低。因此,对象路径确定部16、16a也可以不将该预测路径确定为对象路径。
[0148]
这样,车外环境识别部12识别信号灯的点亮状态,对象路径确定部16、16a进一步将多个预测路径中的在信号灯的点亮状态为能够通过的点亮状态的方向上延伸的预测路径确定为对象路径。由此,能够利用可认为在信号灯的点亮状态为禁止通过的点亮状态的方向上延伸的预测路径的实现可能性低这一情况,更适当地生成自动驾驶的行进路径。
[0149]
在上述实施方式中,第一行进路径是使车辆在干涉位置之前停止那样的行进路径,但并不限定于此。例如,在自身车辆路径与对象路径发生干涉的情况下,行进路径生成部17也可以基于车辆的车速、自身车辆路径及干涉位置,按照使沿着自身车辆路径行驶的车辆远离移动体那样的操舵计划进行第一行进路径的生成。另外,第一行进路径也可以兼具使车辆在干涉位置之前停止的速度计划和使车辆远离移动体那样的操舵计划。
[0150]
在上述实施方式中,作为是否确定为对象路径的条件,例示了预测横向加速度与横向加速度阈值的比较结果、或者预测纵向加速度与纵向加速度阈值的比较结果,但并不限定于此。例如,对象路径确定部也可以基于根据预测横向加速度和预测纵向加速度算出的合成预测加速度、与针对合成预测加速度的加速度阈值的比较结果,确定为对象路径。
[0151]
在上述实施方式中,例示了预测横向加速度及预测纵向加速度作为预测加速度,但并不限定于此。例如,作为预测加速度,也可以使用车辆高度方向的加速度的预测值。
[0152]
在上述第二实施方式中,使用交通法规上的优先顺位进行对象路径的确定,但也可以省略。上述第一实施方式与上述第二实施方式也可以相互组合。也可以将上述变形例适当组合来进行对象路径的确定。
[0153]
在上述第一实施方式中,对预测横向加速度的大小的最大值与横向加速度阈值进行了比较,但并不限定于此。例如,在对象路径确定部的判定中,也可以使用带正负符号的值作为预测横向加速度,并且横向加速度阈值也使用带对应的正负符号的阈值。另外,也可以不必使用最大值。在上述第二实施方式中,对预测纵向加速度的大小的最大值与纵向加速度阈值进行比较,但并不限定于此。例如,在对象路径确定部的判定中,也可以使用带正负符号的值作为预测纵向加速度,并且纵向加速度阈值也使用带对应的正负符号的阈值。另外,也可以不必使用最大值。总之,对象路径确定部基于预测加速度与加速度阈值的比较结果来确定对象路径即可。
[0154]
在上述实施方式中,例示了具备自动驾驶行进路径生成装置的自动驾驶装置,但并不限定于此。作为至少省略致动器5及行驶控制部18而仅具有自动驾驶行进路径生成装置的功能的形态,也能够实施本发明。在该情况下,例如,由自动驾驶行进路径生成装置生成的行进路径也可以经由通信网络等从自动驾驶行进路径生成装置向自动驾驶车辆发送,并用于使自动驾驶车辆进行自动驾驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1