一种基于AI物体检测算法的建筑施工监理系统及方法
一种基于ai物体检测算法的建筑施工监理系统及方法
技术领域
1.本发明涉及建筑监理技术领域,特别是涉及一种基于ai物体检测算法的建筑施工监理系统及方法。
背景技术:
2.装配式建筑通过工业化模块加工、现场组装建造的建筑方式,改变了传统现场人工建造技术的弊病,使建筑产品和建筑行业向低碳、节能、绿色、高效、稳定的方向发展。但在施工环节中,存在因装配顺序错误造成的质量甚至安全问题,使得本具优势的建造变革的边际效应递减。目前,往往采用专业人员现场巡查的方式进行建筑监理,费时费力,效果较差,而且存在建筑监理专业人才匮乏,监理工作精度差,实时反馈机制弱,监理人员暴露于危险施工环境中,容易出现安全隐患等问题,不利于施工方对工程质量、进度、费用、安全生产及环境保护的管控。因此,设计一种ai物体检测算法的建筑施工监理系统及方法是十分有必要的。
技术实现要素:
3.本发明的目的是提供一种基于ai物体检测算法的建筑施工监理系统及方法,能够实现无人情况下的建筑施工监理,提高了监理工作的精度,加强了监理工作中的实时反馈机制,提升了建筑行业的科技水平。
4.为实现上述目的,本发明提供了如下方案:
5.一种基于ai物体检测算法的建筑施工监理系统,包括:外壳、mcu、微处理器、图像采集组件、物体检测计算组件及供电组件,所述图像采集组件固定设置在所述外壳的下端,所述微处理器、mcu、物体检测计算组件及供电组件设置在所述外壳的内部,所述供电组件连接所述mcu、微处理器、物体检测计算组件及图像采集组件,用于供电,所述微处理器电性连接所述mcu、图像采集组件及物体检测计算组件;
6.所述外壳上设置有电源接口,所述供电组件通过电源接口连接外接电源,所述外壳的顶部设置有装载台,用于将系统安装至施工现场;
7.所述微处理器包括第一主板及设置在第一主板上的cpu、ram、网络蓝牙模块、usb接口、micro hdmi视频接口、扩展gpio、供电接口、摄像头接口及千兆以太网接口,所述第一主板通过所述网络蓝牙模块或千兆以太网接口连接云端服务器,所述第一主板通过供电接口连接供电组件;
8.所述mcu包括第二主板、gps模块及蜂鸣模块,所述gps模块及蜂鸣模块连接所述第二主板,所述第二主板通过所述usb接口连接所述第一主板,所述gps模块用于获取该系统的物理坐标,所述蜂鸣模块用于报警;
9.所述图像采集组件包括旋转云台、摄像头、led照明灯及光感探头,所述旋转云台设置在所述外壳的底部,所述摄像头、led照明灯及光感探头均固定设置在所述旋转云台的底部,所述摄像头通过所述摄像头接口连接所述第一主板,所述旋转云台、led照明灯及光
感探头均电性连接所述mcu;
10.所述物体检测计算组件为神经计算棒,所述神经计算棒通过所述usb接口连接所述第一主板。
11.可选的,所述第二主板上还设置有io接口,所述旋转云台通过所述io接口连接所述第二主板。
12.可选的,所述供电组件为蓄电池。
13.可选的,所述图像采集组件还包括摄像头保护罩,所述摄像头保护罩罩设在所述旋转云台的下端,用于保护所述图像采集组件。
14.可选的,所述外壳上还固定设置有lcd迷你显示屏,所述lcd迷你显示屏电性连接所述微处理器。
15.本发明还提供了一种基于ai物体检测算法的建筑施工监理方法,应用于上述的基于ai物体检测算法的建筑施工监理系统,包括如下步骤:
16.步骤1:根据装配式建造施工项目建立bim模型,利用tensorflow和yolov算法针对装配式建筑施工项目中的所有建筑组件进行深度学习,当准确率达到90%以上时,确定学习完毕,将算法布置到第一主板及神经计算棒中,并将布置完成的系统安装到施工现场;
17.步骤2:开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息;
18.步骤3:根据gps模块采集的物理坐标确定系统所在空间的位置,并将其与bim模型中虚拟环境的相应位置进行匹配,完成后在lcd迷你显示屏上显示匹配完成;
19.步骤4:根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配。
20.可选的,步骤2中,开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息,具体为:
21.将外接电源通过电源接口接入系统,并开启系统电源,对mcu、微处理器、图像采集组件、物体检测计算组件进行自检,自检完成后,将各部件信息显示在lcd迷你显示屏上,若发生错误,则mcu控制蜂鸣模块进行报警,并将错误信息显示在lcd迷你显示屏上,供工作人员处理。
22.可选的,步骤4中,根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配,具体为:
23.根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过mcu驱动旋转云台360
°
旋转,进而通过微处理器控制摄像头对系统所在空间的原始图像进行采集,其中,当光感探头检测到环境光线对图像采集解析度产生影响时,mcu控制led照明灯开启,进行微环境补光,在神经计算棒中通过yolov算法提取原始图像的图像特征,并将其与虚拟环境中的图像特征进行匹配,得到匹配概率,若匹配概率大于90%,则判断系统所述空间与虚拟环境相匹配,若匹配概率小于80%,则mcu控制蜂鸣模块报警,并将报警信息显示在lcd迷你显示屏上,微处理器将报警信息及匹配信息上传至云端服务器,云端服务器
将信息分发给负责人进行处理。
24.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的基于ai物体检测算法的建筑施工监理系统及方法,该系统采用了微处理器、mcu、图像采集组件及神经计算棒,能够进行图像的采集,并将采集的图像传输给微处理器,在神经计算棒中进行物体检测,并与建立的bim模型中的虚拟环境进行匹配,若出现虚拟环境设计方案相冲突的情况,mcu还可控制蜂鸣模块报警,微处理器将匹配信息及报警信息上传至云端服务器,云端服务器可将其分发给负责人,从而进行处理;该系统设置了旋转云台,mcu可以控制旋转云台360
°
旋转,能够拍摄到系统所在位置的全部图像,该系统还设置了装载台,通过装载台可以将该系统固定在指定位置,该系统的图像采集组件还设置了光感探头及led照明灯,当光感探头检测到周围环境光线影响到图像采集解析度时,mcu控制led照明灯开启,进行微环境补光,该系统设置有外壳及摄像头保护罩,用于保护各个组件;该方法包括根据装配式建造施工项目建立bim模型,利用tensorflow和yolov算法针对装配式建筑施工项目中的所有建筑组件进行深度学习,当准确率达到90%以上时,确定学习完毕,将算法布置到第一主板及神经计算棒中,并将布置完成的系统安装到施工现场,开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息,根据gps模块采集的物理坐标确定系统所在空间的位置,并将其与bim模型中虚拟环境的相应位置进行匹配,完成后在lcd迷你显示屏上显示匹配完成,根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
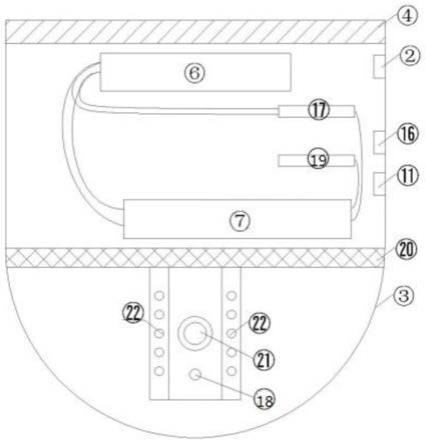
26.图1为本发明实施例基于ai物体检测算法的建筑施工监理系统结构示意图;
27.图2为外壳正视图;
28.图3为外壳后视图;
29.图4为第一主板结构示意图;
30.图5为本发明实施例基于ai物体检测算法的建筑施工监理方法流程示意图。
31.附图标记:1、外壳;2、电源接口;3、摄像头保护罩;4、装载台;5、lcd迷你显示屏;6、蓄电池;7、第一主板;8、cpu;9、ram;10、网络蓝牙模块;11、usb接口;12、micro hdmi视频接口;13、扩展gpio;14、供电接口;15、摄像头接口;16、千兆以太网接口;17、第二主板;18、光感探头;19、神经计算棒;20、旋转云台;21、摄像头;22、led照明灯。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种基于ai物体检测算法的建筑施工监理系统及方法,能够实现无人情况下的建筑施工监理,提高了监理工作的精度,加强了监理工作中的实时反馈机制,提升了建筑行业的科技水平,降低了光纤接头沾染灰尘造成损坏的风险。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.如图1
‑
4所示,本发明实施例提供的基于ai物体检测算法的建筑施工监理系统,包括:外壳1、mcu、微处理器、图像采集组件、物体检测计算组件及供电组件,所述图像采集组件设置在所述外壳1的下端,所述微处理器、mcu、物体检测计算组件及供电组件设置在所述外壳1的内部,所述供电组件连接所述mcu、微处理器、物体检测计算组件及图像采集组件,用于供电,所述微处理器电性连接所述mcu、图像采集组件及物体检测计算组件;
36.所述外壳1上设置有电源接口2,所述供电组件通过电源接口2连接外接电源,所述外壳1的顶部设置有装载台4,用于将系统安装至施工现场;
37.所述微处理器包括第一主板7及设置在第一主板上7的cpu8、ram9、网络蓝牙模块10、usb接口11、micro hdmi视频接口12、扩展gpio13、供电接口14、摄像头接口15及千兆以太网接口16,所述第一主板7通过所述网络蓝牙模块10或千兆以太网接口16连接云端服务器,所述第一主板7通过供电接口14连接供电组件;
38.所述mcu包括第二主板17、gps模块及蜂鸣模块,所述gps模块及蜂鸣模块连接所述第二主板17,所述第二主板17通过所述usb接口11连接所述第一主板7,所述gps模块用于获取该系统的物理坐标,所述蜂鸣模块用于报警;
39.所述图像采集组件包括旋转云台20、摄像头21、led照明灯22及光感探头18,所述旋转云台20设置在所述外壳1的底部,所述摄像头21、led照明灯22及光感探头18均固定设置在所述旋转云台20的底部,所述摄像头21通过所述摄像头接口15连接所述第一主板7,所述旋转云台20、led照明灯22及光感探头18均电性连接所述mcu;
40.所述物体检测计算组件为神经计算棒19,所述神经计算棒19通过所述usb接口11连接所述第一主板7。
41.所述第二主板17上还设置有io接口,所述旋转云台20通过所述io接口连接所述第二主板17,所述第二主板17也可通过io接口连接其他外部运载设备,例如无人车或无人机等。
42.所述供电组件为蓄电池6,外接电源通过电源接口2为蓄电池6充电,蓄电池为各个部件供电。
43.所述图像采集组件还包括摄像头保护罩3,所述摄像头保护罩3罩设在所述旋转云台20的下端,用于保护所述图像采集组件。
44.所述外壳1上还固定设置有lcd迷你显示屏5,所述lcd迷你显示屏5电性连接所述微处理器。
45.本发明提供的基于ai物体检测算法的建筑施工监理系统既可固定安装,也可与无人运载设备例如无人机或机器人配合使用。
46.如图5所示,本发明还提供了一种基于ai物体检测算法的建筑施工监理方法,应用
于上述的基于ai物体检测算法的建筑施工监理系统,包括如下步骤:
47.步骤1:根据装配式建造施工项目建立bim模型,利用tensorflow和yolov算法针对装配式建筑施工项目中的所有建筑组件进行深度学习,当准确率达到90%以上时,确定学习完毕,将算法布置到第一主板及神经计算棒中,并将布置完成的系统安装到施工现场;
48.步骤2:开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息;
49.步骤3:根据gps模块采集的物理坐标确定系统所在空间的位置,并将其与bim模型中虚拟环境的相应位置进行匹配,完成后在lcd迷你显示屏上显示匹配完成;
50.步骤4:根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配。
51.步骤2中,开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息,具体为:
52.将外接电源通过电源接口接入系统,并开启系统电源,对mcu、微处理器、图像采集组件、物体检测计算组件进行自检,自检完成后,将各部件信息显示在lcd迷你显示屏上,若发生错误,则mcu控制蜂鸣模块进行报警,并将错误信息显示在lcd迷你显示屏上,供工作人员处理。
53.步骤4中,根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配,具体为:
54.出于节省能源和减少硬件损耗的目的,本发明无需时刻都进行监测,根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过mcu驱动旋转云台360
°
旋转,进而通过微处理器控制摄像头对系统所在空间的原始图像进行采集,其中,当光感探头检测到环境光线对图像采集解析度产生影响时,mcu控制led照明灯开启,进行微环境补光,在神经计算棒中通过yolov算法提取原始图像的图像特征,并将其与虚拟环境中的图像特征进行匹配,得到匹配概率,若匹配概率大于90%,则判断系统所述空间与虚拟环境相匹配,若匹配概率小于80%,则mcu控制蜂鸣模块报警,并将报警信息显示在lcd迷你显示屏上,微处理器将报警信息及匹配信息上传至云端服务器,云端服务器将信息分发给负责人进行处理。
55.本发明所用的微处理器(microprocessor)是可编程特殊集成电路,是卡片式计算机的主要组成部分,可在其上完整的运行linux、windows等特定版本的操作系统,且板载了usb、以太网和hdmi等输入输出设备接口,能外接键盘显示设备等。
56.本发明所用的微控制器(microcontrollers unite,简称mcu)是低成本、单芯片的独立计算机系统。这些微控制器隐藏在无数日常产品中,是嵌入在如穿戴式设备、无人机、3d打印机、玩具、电饭锅、智能插座、电动踏板车、洗衣机等产品的内置计算机,由于其体积小、耗电低、扩展性强等特色,将逐渐取代plc在工业、生活领域的作用,其需要精细控制gpio的能力是对微处理器的很好的补充。
57.本发明所使用的神经计算棒(neural compute stick,简称ncs)为深度神经网络硬件加速器,是用来实时推理的低功耗应用上开发、微调和部署卷积神经网络的硬件设备,
可在其上完成边缘深度学习,并可与微处理器完美的结合,提升微处理器在神经网络的算力,使得图像识别,推断的速度显著提升。将这些设备相互连接也是物联网发展的趋势。
58.本发明将tensorflow中的物体检测算法yolov3布置在微处理器及神经计算棒中,根据建筑项目施工进度,设置图像采集时间,通过mcu及微处理器定期对施工进度进行现场图像采集,并将图像传递给微处理器,在神经计算棒中进行物体检测,与bim模型中的构建图像进行匹配,如出现与bim设计方案相冲突的情况,系统及时报警,并将对比结果通过网络传输给负责人,及时更正。
59.本发明提供的基于ai物体检测算法的建筑施工监理系统及方法,该系统采用了微处理器、mcu、图像采集组件及神经计算棒,能够进行图像的采集,并将采集的图像传输给微处理器,在神经计算棒中进行物体检测,并与建立的bim模型中的虚拟环境进行匹配,若出现虚拟环境设计方案相冲突的情况,mcu还可控制蜂鸣模块报警,微处理器将匹配信息及报警信息上传至云端服务器,云端服务器可将其分发给负责人,从而进行处理;该系统设置了旋转云台,mcu可以控制旋转云台360
°
旋转,能够拍摄到系统所在位置的全部图像,该系统还设置了装载台,通过装载台可以将该系统固定在指定位置,该系统的图像采集组件还设置了光感探头及led照明灯,当光感探头检测到周围环境光线影响到图像采集解析度时,mcu控制led照明灯开启,进行微环境补光,该系统设置有外壳及摄像头保护罩,用于保护各个组件;该方法包括根据装配式建造施工项目建立bim模型,利用tensorflow和yolov算法针对装配式建筑施工项目中的所有建筑组件进行深度学习,当准确率达到90%以上时,确定学习完毕,将算法布置到第一主板及神经计算棒中,并将布置完成的系统安装到施工现场,开启系统电源,对mcu、微处理器、图像采集组件及物体检测计算组件进行自检,并在lcd迷你显示屏显示状态信息,根据gps模块采集的物理坐标确定系统所在空间的位置,并将其与bim模型中虚拟环境的相应位置进行匹配,完成后在lcd迷你显示屏上显示匹配完成,根据bim模型的装配式建造过程设计时间节点及装配式建造施工进度,定期通过微处理器及mcu控制图像采集组件采集系统所在空间的原始图像,并将其与bim模型中的虚拟环境图像进行特征匹配,判断系统所在空间与虚拟环境是否匹配。
60.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1