一种无人机机巢控制方法及无人机机巢与流程
1.本技术涉及输电线路无人机巡检技术领域,尤其涉及一种无人机机巢控制方法及无人机机巢。
背景技术:
2.无人机机巢一般为无人机提供停泊场地,对无人机进行充电和防护功能,且能够为无人机提供航迹规划。无人机降落到机巢上都是通过无人机上带载的摄像机采集机巢位置信息,判断降落条件,实现无人机的自主降落。
3.但是在无人机监测输电通道的过程中,周围可能会出现一些影响无人机工作的隐患,或极端天气等突发情况。而现有的无人机机巢并不能对无人机、输电通道、输电线路周围出现的施工机械、山火等隐患及时作出预警,也不能根据当前的环境确定是否应该召回无人机,容易造成无人机损坏。在无人机降落后,对输电通道的监控会出现空档,不利于输电通道和输电线路的监控和维护。且现有的无人机机巢不能精确调整无人机在起飞、降落以及在巡检时的飞行姿态。
技术实现要素:
4.本技术实施例提供了一种无人机机巢控制方法及无人机机巢,用于解决如下技术问题:现有的无人机机巢不能对输电通道进行监测以及根据输电通道的实际情况调整无人机的飞行姿态和飞行距离。
5.本技术实施例采用下述技术方案:
6.一方面,本技术实施例提供了一种无人机机巢控制方法,包括:获取水平摄像模组采集的第一监控图像;其中,所述第一监控图像包含所述无人机机巢四周的输电通道画面;并对所述第一监控图像进行识别,得到所述第一监控图像中的隐患目标以及输电导线目标;并确定所述输电导线目标的导线状态信息;以及,获取垂直摄像模组采集的第二监控图像;其中,所述第二监控图像包含所述无人机机巢正下方的输电通道画面;并对所述第二监控图像进行识别,确定输电杆塔下方的地面异常情况;并基于所述隐患目标、所述导线状态信息以及所述地面异常情况,确定是否需要进行告警;以及,获取垂直摄像模组采集的第三监控图像;其中,所述第三监控图像包含所述无人机机巢正上方的输电通道画面;并对所述第三监控图像进行识别,得到所述第三监控图像中的无人机目标,并获取所述无人机目标的当前姿态以及所述无人机目标与输电导线的当前距离;基于预存的标准无人机姿态,调整所述无人机目标的当前姿态;以及,基于所述导线状态信息,调整所述无人机目标与输电导线的当前距离。
7.本技术实施例通过安装在无人机机巢上的多维度摄像模组,能够采集无人机机巢各个方向的输电通道画面,并通过具有图像识别和边缘计算功能的主控单元,对各个方向的输电通道画面进行识别、计算,可以对不同方向出现的不同隐患进行针对性地告警,实现了通过无人机机巢对输电线路通道、输电导线状态、无人机姿态的在线监测,扩展了传统无
人机机巢的功能,提高了无人机姿态调整的精度。
8.在一个可行的实施方式中,所述导线状态信息包括导线舞动幅度;确定所述输电导线目标的导线舞动幅度,具体包括:在预设时间内,确定采集的每一帧所述第一监控图像中,所述输电导线目标上若干间隔棒的像素位置;确定同一个间隔棒在不同第一监控图像中的像素位置的最大变化距离,将所述最大变化距离确定为所述间隔棒的舞动幅度;将所述若干间隔棒的舞动幅度的最大值,确定为所述输电导线目标的导线舞动幅度;其中,所述舞动幅度的单位为像素;基于所述导线舞动幅度,确定是否针对所述导线进行告警。
9.本技术实施例将导线上各间隔棒的舞动幅度的最大值确定为输电导线的舞动幅度,而不是求平均值或者最小值,是因为导线上舞动幅度最大的部分很可能会造成一些隐患,如果只考虑平均幅度,则可能会忽略这些隐患,从而造成损失。舞动幅度最大的部分也可能影响无人机的飞行,因此将最大值作为舞动幅度可以增加告警的有效性及时性,保证无人机的飞行安全。
10.在一个可行的实施方式中,所述导线状态信息还包括导线覆冰厚度;确定所述输电导线目标的导线覆冰厚度,具体包括:通过预训练的覆冰目标识别网络,确定所述第一监控图像中的所述输电导线目标中的覆冰段导线,并输出所述覆冰段导线对应的第一目标图像;其中,所述第一目标图像是所述第一监控图像的一部分,包括所述覆冰段导线及背景图像;通过图像分割网络对所述第一目标图像进行图像分割,得到第二目标图像;其中,所述第二目标图像中只包含所述覆冰段导线;基于预设算法,确定所述第二目标图像中,所述覆冰段导线的导线覆冰厚度;基于所述导线覆冰厚度,确定是否针对所述导线进行告警。
11.本技术实施例通过无人机机巢即可监控导线的舞动幅度和覆冰厚度,无需在输电通道安装其他设备来监测这些信息,节省成本,且减少输电通道中安装的监测设备数量,设备部署更加简单快捷。
12.在一个可行的实施方式中,基于所述导线状态信息,调整所述无人机目标与输电导线的当前距离,具体包括:确定与所述无人机距离最近的输电导线目标的导线舞动幅度;并向所述无人机目标发送第一指令,以使所述无人机目标与输电导线的距离增加所述导线舞动幅度;以及,确定与所述无人机距离最近的输电导线目标的导线覆冰厚度;并向所述无人机目标发送第二指令,以使所述无人机目标与输电导线的距离增加所述导线覆冰厚度。
13.本技术实施例通过根据导线舞动幅度和导线覆冰厚度,调整无人机与输电导线之间的距离,有助于保护无人机不被导线影响,保证无人机的飞行安全。
14.在一个可行的实施方式中,基于所述隐患目标、所述导线状态信息以及所述地面异常情况,确定是否需要进行告警,具体包括:确定所述隐患目标与所述输电导线目标的像素距离,并通过所述像素距离得到所述隐患目标与所述输电导线目标的实际距离;在所述实际距离小于预警距离的情况下,对所述隐患目标进行告警;以及,在所述导线状态信息达到预设条件的情况下,对所述输电导线目标的状态进行告警;以及,在识别出所述地面异常情况时,对所述地面异常情况进行告警;其中,所述地面异常情况至少包括以下一项或多项:地面塌陷、滑坡。
15.在一个可行的实施方式中,在基于所述隐患目标、所述导线状态信息以及所述地面异常情况,确定是否需要进行告警之后,所述方法还包括:将包含所述隐患目标的第一监控图像、所述导线状态信息、包含所述地面异常情况的第二监控图像以及对应的告警信息,
发送到系统平台进行展示,以便于所述系统平台将所述告警信息发送到对应的工作人员的移动终端。
16.在一个可行的实施方式中,基于预存的标准无人机姿态,调整所述无人机目标的姿态,具体包括:根据所述无人机目标的位置,确定所述无人机目标的运行状态;其中,所述运行状态至少包括以下任意一项:起飞状态、降落状态、巡检状态;基于所述无人机目标的运行状态,确定对应的标准无人机姿态;将所述第三监控图像中无人机目标的姿态与所述对应的标准无人机姿态进行对比,确定姿态重合度;在所述姿态重合度小于第一预设阈值的情况下,向所述无人机目标发送姿态调整指令,调整所述无人机目标的姿态,直至所述姿态重合度达到所述第一预设阈值。
17.本技术通过实时采集无人机目标的姿态,实现对无人机目标姿态的实时调整,辅助无人机自主起飞、降落和巡检,更精确地控制无人机的飞行过程。
18.在一个可行的实施方式中,所述方法还包括:实时采集所述无人机机巢的蓄电池的电池温度;在所述电池温度超过第二预设阈值且低于第三预设阈值的情况下,通过充电控制器控制所述蓄电池停止放电;在所述电池温度超过第三预设阈值且低于第四预设阈值的情况下,通过所述充电控制器将所述蓄电池的放电电流调整为预设电流。
19.本技术通过充电控制器以及温度采集控制单元,对蓄电池进行充放电控制,可以在温度较低或过低时调整电流的大小和通断,保护电池性能,延长电池使用寿命。
20.另一方面,本技术实施例还提供了一种无人机机巢,包括:多维度摄像模组以及主控单元;所述多维度摄像模组包括水平摄像模组以及垂直摄像模组;所述水平摄像模组包括面向所述无人机机巢前后左右方向的若干摄像头,用于采集所述无人机机巢四周的输电通道画面;所述垂直摄像模组包括面向所述无人机机巢上方和下方的若干摄像头,用于采集所述无人机机巢上方和下方的输电通道画面;所述主控单元与所述多维度摄像模组连接,用于获取所述水平摄像模组采集的第一监控图像;其中,所述第一监控图像包含所述无人机机巢四周的输电通道画面;并对所述第一监控图像进行识别,得到所述第一监控图像中的隐患目标以及输电导线目标;确定所述输电导线目标的导线状态信息;以及用于获取垂直摄像模组采集的第二监控图像;其中,所述第二监控图像包含所述无人机机巢下方的输电通道画面;并对所述第二监控图像进行识别,确定输电杆塔下方的地面异常情况;并基于所述隐患目标、所述导线状态信息以及所述地面异常情况,确定是否需要进行告警;以及用于获取垂直摄像模组采集的第三监控图像;其中,所述第三监控图像包含所述无人机机巢上方的输电通道画面;并对所述第三监控图像进行识别,得到所述第三监控图像中的无人机目标,并获取所述无人机目标的当前姿态以及所述无人机目标与输电导线的当前距离;并基于预存的标准无人机姿态,调整所无人机目标的当前姿态,以及基于所述导线状态信息,调整所述无人机目标与输电导线的当前距离。
21.在一个可行的实施方式中,所述无人机机巢还包括:供电单元;所述供电单元包括太阳能电池板、充电控制器、蓄电池以及温度采集控制单元;所述太阳能电池板,用于对所述蓄电池进行充电;所述温度采集控制单元分别与所述蓄电池以及所述充电控制器连接,用于实时采集蓄电池的电池温度,并将所述电池温度发送到所述充电控制器;所述充电控制器与所述蓄电池连接,用于在所述电池温度超过第二预设阈值且低于第三预设阈值的情况下,控制所述蓄电池停止放电;在所述电池温度超过第三预设阈值且低于第四预设阈值
的情况下,将所述蓄电池的放电电流调整为预设电流。
22.本技术将多种功能集于无人机机巢上,扩展了传统无人机机巢的功能且提高了无人机姿态调整的精度,将多个设备的功能精简到一个设备中,使得输电通道现场的设备布设更加简单,具有较大的实用价值。
附图说明
23.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
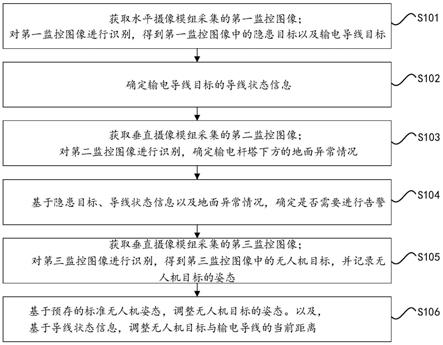
24.图1为本技术实施例提供的一种无人机机巢控制方法流程图;
25.图2为本技术实施例提供的一种无人机机巢结构示意图。
具体实施方式
26.为了使本技术领域的人员更好地理解本技术中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本说明书实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
27.图1为本技术实施例提供的一种无人机机巢控制方法流程图,如图1所示,本技术实施例提供的一种无人机机巢控制方法可以包括步骤s101-s106:
28.需要说明的是,本技术实施例提供的无人机机巢控制方法,其执行主体是无人机机巢中的各个单元,具体参见以下各步骤的相关描述。
29.s101、主控单元获取水平摄像模组采集的第一监控图像,对第一监控图像进行识别,得到第一监控图像中的隐患目标以及输电导线目标。
30.具体地,水平摄像模组安装在无人机机巢上,通过分别面向无人机机巢前方、后方、左方、右方的摄像头,采集无人机机巢四周的输电通道画面。
31.进一步地,主控单元获取水平摄像模组采集的第一监控图像,即无人机机巢四周的输电通道画面。然后通过智能分析单元中的深度学习算法对第一监控图像进行识别,识别无人机机巢周围是否出现施工机械、塔吊、山火等隐患目标,并识别第一监控图像中的输电导线目标。其中,第一监控图像并不是一张图像,而是水平摄像模组中朝向各个方向的摄像头采集的一组图像,统称为第一监控图像。
32.作为一种可行的实施方式,无人机机巢可以安装在输电导线的杆塔上。
33.s102、主控单元计算输电导线目标的导线状态信息。
34.在得到输电导线目标之后,主控单元继续计算输电导线目标的导线状态信息。在本技术的一个或多个实施例中,上述导线状态信息至少包括导线舞动幅度、导线覆冰厚度中的任一项或者多项。
35.具体地,主控单元中通过智能分析单元在同一个摄像头采集的一段时间内的每一帧第一监控图像中,识别出输电导线目标上的每个间隔棒的像素位置。然后计算同一个间
隔棒在不同第一监控图像中的像素位置的最大变化距离,即为该间隔棒的舞动幅度。选出舞动幅度最大的间隔棒,将这个间隔棒的舞动幅度作为输电导线目标的舞动幅度。
36.需要说明的是,此时计算出来的输电导线目标的舞动幅度的单位为像素,若要计算实际舞动幅度,则用计算出来的输电导线目标的舞动幅度再乘以像素尺寸与实际物理尺寸的比例即可。可以识别间隔棒在第一监控图像中所占的像素尺寸,并计算间隔棒的像素尺寸与间隔棒的实际物理尺寸的比值,来计算像素尺寸与实际物理尺寸的比例。
37.在一个实施例中,根据scalen=an/an得到第一监控图像中每个间隔棒上像素点的像素尺寸与实际物理尺寸的比例;其中,an表示间隔棒的物理尺寸,an表示间隔棒的像素尺寸,n表示输电导线上第n个间隔棒。然后根据aptitudepixeln=scalen*abs(y
1-y2),得到每个间隔棒的实际舞动幅度;其中,y1为第n个间隔棒在每一帧第一监控图像中的像素位置中纵坐标的最大值,y2为第n个间隔棒在每一帧第一监控图像中的像素位置中纵坐标的最小值。最后,将输电导线上若干间隔棒的实际舞动幅度中的最大值apt=max(aptituden)作为当前第一监控图像中输电导线目标的实际舞动幅度。
38.进一步地,智能分析单元通过预训练的覆冰目标识别网络,识别出输电导线目标中的覆冰段导线,并截取包含覆冰段导线的部分图像,作为第一目标图像。即第一目标图像是第一监控图像中包含覆冰段导线的部分,包括覆冰段导线及背景图像。然后通过图像分割网络对第一目标图像进行图像分割,将覆冰段导线与背景图像分离,得到第二目标图像,第二目标图像中只包含覆冰段导线,不包含背景图像。然后基于预设算法,确定第二目标图像中,覆冰段导线的导线覆冰厚度。其中,预设算法可以采用现有的计算导线覆冰厚度的算法,本技术不作赘述。
39.s103、主控单元获取垂直摄像模组采集的第二监控图像,对第二监控图像进行识别,确定输电杆塔下方的地面异常情况。
40.具体地,垂直摄像模组安装在无人机机巢上,通过分别面向无人机机巢上方和下方的摄像头,采集无人机机巢上方和下方的输电通道画面。
41.进一步地,主控单元获取安装在无人机机巢下方的摄像头采集的第二监控图像,即无人机机巢下方的输电通道画面,包括下方的杆塔、地面等场景。然后通过智能分析单元中的深度学习算法对第二监控图像进行识别,识别杆塔下方是否存在地面塌陷、滑坡等地面异常情况。
42.s104、主控单元基于隐患目标、导线状态信息以及地面异常情况,确定是否需要进行告警。
43.具体地,主控单元通过边缘计算单元确定第一监控图像中隐患目标与输电导线目标的像素距离,再乘以像素尺寸与实际尺寸的比例,得到隐患目标与输电导线目标的实际距离。
44.进一步地,在实际距离小于主控单元预存的预警距离的情况下,主控单元将含有隐患目标的第一监控图像以及告警信息发送到系统平台,对该隐患目标进行告警。
45.进一步地,在导线状态信息达到预设条件的情况下,将计算出的导线状态信息发送到系统平台,对输电导线目标的状态进行告警。
46.作为一种可行的实施方式,预设条件具体包括:导线舞动幅度大于预设舞动幅度,以及导线覆冰厚度大于预设覆冰厚度。
47.进一步地,在第二监控图像中识别出地面异常情况时,将包含地面异常情况的第二监控图像以及告警信息发送到系统平台,对地面异常情况进行告警。
48.进一步地,系统平台对接收到的各种信息进行展示,并将收到的告警信息发送到对应的工作人员的移动终端。
49.s105、主控单元获取垂直摄像模组采集的第三监控图像,对第三监控图像进行识别,得到第三监控图像中的无人机目标,并记录无人机目标的姿态。
50.具体地,主控单元获取安装在无人机机巢上方的摄像头采集的第三监控图像,即无人机机巢上方的输电通道画面,包括上方的输电导线、无人机、天空等场景。然后通过智能分析单元中的深度学习算法对第三监控图像进行识别,识别上方的无人机目标,并识别出无人机目标的姿态以及无人机目标的位置。
51.在一个实施例中,安装在无人机机巢上方的摄像头,采集无人机停泊时的图像,并记录无人机停泊时的姿态图像s1。当无人机在飞行状态时,安装在无人机机巢上方的摄像头启动图像采集,同时机巢启动超声波测距模块测量无人机距离机巢的高度h,并通过图像分析记录此时无人机飞行姿态图像s2。
52.需要说明的是,水平摄像模组采集第一监控图像,与垂直摄像模组采集第二监控图像以及第三监控图像是同时进行的,没有先后顺序之分。
53.s106、主控单元基于预存的标准无人机姿态,调整无人机目标的姿态。以及,基于导线状态信息,调整无人机目标与输电导线的当前距离。
54.具体地,主控单元根据无人机目标的位置,确定无人机目标的运行状态,无人机目标的运行状态包括起飞状态、降落状态、巡检状态。无人机目标的位置通过无人机目标距无人机机巢的高度来表示。
55.在一个实施例中,无人机目标距无人机机巢的高度为h。在h大于等于无人机机巢与输电导线的距离时,确定无人机目标在巡检状态。在h小于无人机机巢与输电导线的距离时,若检测到h在增大,则确定无人机目标在起飞状态,若检测到h在减小,则确定无人机目标在降落状态。
56.进一步地,主控单元基于无人机目标的运行状态,确定该运行状态对应的标准无人机姿态。然后将第三监控图像中无人机目标的姿态与对应的标准无人机姿态进行对比,通过边缘计算单元计算二者的姿态重合度。在姿态重合度小于第一预设阈值的情况下,主控单元向无人机目标发送姿态调整指令,调整无人机目标的姿态,直至姿态重合度达到第一预设阈值。
57.在一个实施例中,主控单元中预存无人机目标的每种运行姿态对应的标准无人机姿态图像,起飞和降落时的标准无人机姿态图像可以是无人机停泊时采集的无人机姿态图像。在安装在无人机机巢上方的摄像头采集到无人机目标后,首先根据高度h判断无人机目标的运行状态。例如,确定了无人机目标在降落状态,则在预存的标准无人机姿态图像中查找降落状态对应的标准无人机姿态图像s1,并将采集到的无人机目标飞行姿态图像s2与s1进行对比,计算两者的姿态重合度,若姿态重合度达到第一预设阈值,则无需调整无人机目标的姿态。若姿态重合度没有达到第一预设阈值,则计算无人机目标的调整角度,并通过指令发送到对应的无人机目标,使其调整飞行姿态。
58.进一步地,主控单元确定与无人机距离最近的输电导线目标的导线舞动幅度,并
向无人机目标发送第一指令,以使无人机目标与输电导线的距离增加该导线舞动幅度。以及确定与无人机距离最近的输电导线目标的导线覆冰厚度,并向无人机目标发送第二指令,以使无人机目标与输电导线的距离增加该导线覆冰厚度。
59.需要说明的是,第一指令与第二指令没有先后顺序,若导线没有舞动,则无需发送第一指令,若导线没有覆冰,则无需发送第二指令,主控单元先检测到导线舞动就先发送第一指令,先检测到导线覆冰就先发送第二指令。
60.在一个实施例中,若导线舞动幅度为20厘米,无人机与输电导线目标的当前距离为30厘米,则计算30+20=50厘米,并向无人机目标发送第一指令,将无人机目标与输电导线目标的当前距离调整为50厘米。
61.作为一种可行的实施方式,本技术中的无人机机巢通过太阳能电池板对蓄电池进行充电,并通过温度采集控制单元实时采集蓄电池的电池温度。在电池温度超过第二预设阈值且低于第三预设阈值的情况下,通过充电控制器切断充电回路,以保护电池性能。在电池温度超过第三预设阈值且低于第四预设阈值的情况下,通过充电控制器将对外放电电流调整为预设电流。其中,预设电流可设为小电流,防止温度较低时电流过放。
62.需要说明的是,本技术实施例中提到的各种预设阈值,均可由工作人员根据工作经验设置较为合适的值,本技术中不作具体限定。
63.另外,图2为本技术实施例提供的一种无人机机巢结构示意图,如图2所示,无人机机巢200包括:主控单元210、多维度摄像模组220以及供电单元230。
64.具体地,多维度摄像模组220包括水平摄像模组以及垂直摄像模组。水平摄像模组安装在无人机机巢上,包括面向无人机机巢前后左右方向的若干摄像头,用于采集无人机机巢四周的输电通道画面。垂直摄像模组安装在无人机机巢上,包括面向无人机机巢上方和下方的若干摄像头,用于采集无人机机巢上方和下方的输电通道画面。
65.进一步地,主控单元210包括智能分析单元211以及边缘计算单元212,并与多维度摄像模组220连接。智能分析单元211用于对多维度摄像模组220中采集的监控图像进行识别,得到监控图像中的隐患目标、输电导线目标、输电杆塔下方的地面异常情况以及无人机目标。边缘计算单元212用于根据智能分析单元211的识别结果,计算输电导线目标的导线舞动幅度、导线覆冰厚度以及无人机目标的姿态与对应的标准无人机姿态之间的姿态重合度。
66.进一步地,供电单元230包括太阳能电池板231、蓄电池232、温度采集控制单元233以及充电控制器234。太阳能电池板231用于对蓄电池232进行充电。温度采集控制单元233分别与蓄电池232以及充电控制器234连接,用于实时采集蓄电池232的电池温度,并将电池温度发送到充电控制器234。充电控制器234与蓄电池232连接,用于在电池温度超过第二预设阈值且低于第三预设阈值的情况下,切断蓄电池232的充电回路,在电池温度超过第三预设阈值且低于第四预设阈值的情况下,将对外放电电流调整为预设电流。
67.作为一种可行的实施方式,太阳能电池板选用规格为360w/dc18v的钢化玻璃板。蓄电池选用容量200ah磷酸铁锂电池。主控单元包含核心板和控制板,核心板使用高通sdm450处理器,实现数据处理、模型智能分析、数据的上传功能。控制板采用低功耗mcu-stm32l151系列32位单片机,实现核心板运行状态的监控、采集电池容量、调整机巢工作模式等功能。
68.作为一种可行的实施方式,本技术实施例提供的一种无人机机巢还包括无人机机巢本体(图2中未示出)。多维度摄像模组220可以安装在无人机机巢本体的壳体外部,便于采集周围的环境画面。主控单元安装在无人机机巢本体的壳体内部。
69.本技术中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于装置、设备、非易失性计算机存储介质实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
70.上述对本技术特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
71.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术的实施例可以有各种更改和变化。凡在本技术实施例的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1