一种具有横摇约束的欠驱动船舶航向制导方法
1.本发明涉及船舶运动控制技术领域,特别涉及一种具有横摇约束的欠驱动船舶航向制导方法。
背景技术:
2.船舶在风浪中航行不可避免的产生六自由度摇摆运动,其中横摇运动最为剧烈,大幅横摇运动严重影响电气设备正常运行、船舶安全航行和船员的舒适性。欠驱动船舶的运动控制装置通常为航向控制装置(舵)和推进控制装置(推力器),对于橫荡和横摇运动没有相应的控制装置。欠驱动船舶的路径跟踪控制在船舶运动控制技术领域承担重要角色,要求船舶的航向控制系统根据航向制导规律计算的指令航向角以恒定的速度跟踪预先规划的路径或轨迹,目前常用的航向制导方法是los(line of sight,视线法)方法。
3.航向制导规律是路径跟踪控系统中的重要部分,船舶路径跟踪水平面坐标系如图1所示,其中:xoy为大地坐标系,(x
p
(ω),y
p
(ω))为参数化路径,ω为路径参数,为方便起见省略参数ω将路径点坐标简写为(x
p
,y
p
),(x,y)为船舶位置坐标,x
e
为切向跟踪误差,y
e
为垂向跟踪误差,ψ为航向角,β为横向漂角,α
p
为路径切向角,v为橫荡速度,u为纵荡速度,u为航速,δ为前视距离。其中,船舶位置信息可以由gps全球定位系统测量获得,船舶运动状态信息 (包括纵荡速度u、横摇角φ和航向角ψ等)可以由陀螺仪测量获得。针对参数化路径跟踪控制问题,目前提出的los方法(例如比例los、积分los 和自适应los等方法)基本都考虑了横向漂角估计和垂向跟踪误差收敛问题,对于切向跟踪误差的收敛问题考虑较少,同时大幅横摇运动对航向角及航向制导规律的影响并没有加以考虑,这对于风浪中大幅摇摆的欠驱动船舶路径跟踪控制是考虑不充分的。因此,针对没有横摇减摇控制装置的欠驱动船舶,考虑横摇约束的航向制导方法将有助于提高欠驱动船舶的路径跟踪精度。
技术实现要素:
4.本发明的目的是提出一种具有横摇约束的欠驱动船舶航向制导方法,解决在恶劣海况下大幅横摇的欠驱动船舶路径控制的跟踪精度问题。
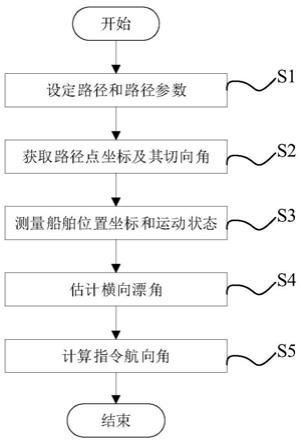
5.为实现上述目的,本发明提供一种具有横摇约束的欠驱动船舶航向制导方法,具体步骤包括:步骤s1、设定路径(x
p
(ω),y
p
(ω))和路径参数ω;步骤s2、根据步骤s1获取路径点坐标(x
p
,y
p
)信息和路径切向角α
p
信息;步骤s3、通过测量获得船舶位置坐标(x,y)信息和船舶运动状态信息;步骤s4、根据步骤s3 所获得的船舶位置坐标信息和船舶运动状态信息估计横向漂角;步骤s5、结合步骤s1~步骤s4所获取的船舶信息,计算指令航向角ψ
d
。
6.优选地,步骤s3所述的船舶运动状态信息包括某一相同t时间的纵荡速度u、横摇角φ、航向角ψ、横摇角速度p和航向角速度r。
7.优选地,步骤s4所述的估计横向漂角具体包括如下步骤:
8.步骤s401、根据某一相同t时间的船舶位置坐标(x,y)信息,计算切向跟踪误差x
e
和垂向跟踪误差y
e
;
9.步骤s402、根据步骤s401中的切向跟踪误差x
e
和垂向跟踪误差y
e
计算横向漂角β的估计值
10.优选地,步骤s402所述的横向漂角β的估计值采用如下公式计算:
[0011][0012]
其中,为g的估计。
[0013]
优选地,步骤s401所述的切向跟踪误差x
e
和垂向跟踪误差y
e
的计算公式如下:
[0014][0015]
优选地,步骤s1所述的路径参数ω是时间t的函数,该路径参数ω由更新规律公式计算获得:
[0016][0017]
其中,u为橫荡速度,ψ为航向角,,α
p
(ω)为路径切向角,x
e
为切向跟踪误差, x
′
p
(ω)为x
p
(ω)对ω的导数,y
′
p
(ω)为y
p
(ω)对ω的导数,k为设计的正常数,为ω对时间t的导数;(x
p
(ω),y
p
(ω))为构成路径的点的坐标。
[0018]
优选地,步骤s2中所述的路径切向角α
p
由如下公式计算:
[0019][0020]
其中,步骤s2中所述的路径点坐标(x
p
,y
p
)和路径切向角α
p
分别由路径 (x
p
(ω),y
p
(ω))和路径切向角α
p
(ω)在某一相同t时间计算获得。
[0021]
优选地,步骤s3所述的船舶运动状态与船舶位置的关系由四自由度运动学耦合模型描述,该模型表达式如下:
[0022][0023][0024][0025][0026]
其中,为船舶位置坐标(x,y)分别对时间t的导数,v为纵荡速度,u为橫荡速度,为横摇角φ对时间t的导数,为航向角ψ对时间t的导数。
[0027]
优选地,所述的可由降阶观测器的方法计算获得,降阶观测器公式如下:
[0028][0029][0030]
其中,m为虚拟状态,为m对时间t的导数,k1为设计的正常数,为α
p
对时间t的导数。
[0031]
优选地,根据所获取的路径切向角α
p
、横向漂角β的估计值和垂向跟踪误差y
e
,步骤s5中所述的指令航向角ψ
d
采用如下公式计算:
[0032][0033]
其中,δ为前视距离。
[0034]
综上所述,与现有技术相比,本发明提供的一种具有横摇约束的欠驱动船舶航向制导方法,具有如下有益效果:考虑了恶劣海况下欠驱动船舶大幅横摇运动对航向角及航向制导规律的影响,通过测量的船舶运动状态,计算获得横向漂角估计,有效提高了恶劣海况下的指令航向角的精度,实现了对船舶航向的准确控制。
附图说明
[0035]
图1为本发明的具有横摇约束的欠驱动船舶航向制导方法的路径跟踪坐标系示意图;
[0036]
图2为本发明的具有横摇约束的欠驱动船舶航向制导方法的指令航向角的计算流程示意图。
具体实施方式
[0037]
以下将结合本发明实施例中的附图1~附图2,对本发明实施例中的技术方案、构造特征、所达成目的及功效予以详细说明。
[0038]
需要说明的是,附图采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施方式的目的,并非用以限定本发明实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
[0039]
需要说明的是,在本发明中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括明确列出的要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0040]
本发明提供了一种具有横摇约束的欠驱动船舶航向制导方法,如图1和图2所示,该欠驱动船舶航向制导方法包括如下步骤:
[0041]
步骤s1、设定路径(x
p
(ω),y
p
(ω))和路径参数ω。
[0042]
其中,步骤s1所述的路径参数ω是时间t的函数,该路径参数ω由如下更新规律公式计算获得:
[0043][0044]
式(1)中,u为橫荡速度,ψ为航向角,α
p
(ω)为路径切向角,x
e
为切向跟踪误差,x
′
p
(ω)为x
p
(ω)对ω的导数,y
′
p
(ω)为y
p
(ω)对ω的导数,k为设计的正常数,为ω对时间t的导数;(x
p
(ω),y
p
(ω))为构成路径的点的坐标;
[0045]
进一步,路径切向角α
p
(ω)由如下公式计算:
[0046][0047]
步骤s2、根据步骤s1获取t时间的路径点坐标(x
p
,y
p
)信息和t时间的路径切向角α
p
信息。
[0048]
步骤s3、根据gps全球定位系统测量获得t时间的船舶位置坐标(x,y)信息,并通过安装在船舶上的陀螺仪获得t时间的船舶运动状态信息。
[0049]
其中,步骤s3所述的船舶运动状态信息包括纵荡速度u、横摇角φ、航向角ψ、横摇角速度p和航向角速度r。
[0050]
进一步地,船舶运动状态与船舶位置的关系由四自由度运动学耦合模型描述,具体如下:
[0051][0052]
式(3)中,为船舶位置坐标(x,y)分别对时间t的导数,v为纵荡速度,u 为橫荡速度,为横摇角φ对时间t的导数,为航向角ψ对时间t的导数。
[0053]
步骤s4、根据步骤s3所获得的船舶位置坐标信息和船舶运动状态信息估计横向漂角,具体包括如下步骤:
[0054]
步骤s401、根据船舶位置坐标(x,y)信息,计算切向跟踪误差x
e
和垂向跟踪误差y
e
,其计算公式如下:
[0055][0056]
步骤s402、根据步骤s401中的切向跟踪误差x
e
和垂向跟踪误差y
e
计算横向漂角β的估计值
[0057]
其中,步骤s402所述的横向漂角β的估计值采用如下公式计算:
[0058][0059]
式(5)中,为g的估计。
[0060]
进一步地,所述的可由降阶观测器的方法计算获得,降阶观测器公式如下:
[0061][0062]
式(6)中,m为虚拟状态,为m对时间t的导数,k1为设计的正常数,为α
p
对时间t的导数。
[0063]
步骤s5、根据步骤s1~步骤s4所获取的路径切向角α
p
、横向漂角β的估计值和垂向跟踪误差y
e
,计算指令航向角ψ
d
。
[0064]
其中,步骤s5中所述的指令航向角ψ
d
采用如下公式计算:
[0065][0066]
式(7)中,δ为前视距离,通常为船长的2到3倍。
[0067]
根据步骤s5计算获得的指令航向角ψ
d
,使船舶航向角ψ获得能够进行跟踪的指令航向角ψ
d
,即船舶可以根据指令航向角ψ
d
调整船舶航行方向,实现船舶航向控制,完成船舶
航向制导。
[0068]
综上所述,与现有欠驱动船舶航向制导方法相比,本发明所提供的具有横摇约束的欠驱动船舶航向制导方法由于考虑了恶劣海况下欠驱动船舶大幅横摇运动对航向角及航向制导规律的影响能够有效提高恶劣海况下的指令航向角精度等优势。
[0069]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1