基于双摇杆手柄的地面移动机器人长时长距离遥控方法
1.本发明涉及人机交互技术领域,给出了一种基于双摇杆手柄的地面移动机器人长时长距离遥控方法。
背景技术:
2.基于轮式底盘的全向移动式服务机器人,以及基于四足、双足构型的足式仿生机器人,已经由实验室走向人类生活,在服务引导、物品输运、厂房巡检、野外侦察、探测救援等诸多领域有着广阔的应用前景。
3.就当前的技术发展水平而言,基于遥控系统进行实时操作是这类地面移动机器人的主要操控方式。源自并发展于电子娱乐领域的双摇杆手柄,例如微软公司的xbox游戏手柄、索尼公司的ps系列游戏手柄、任天堂公司的switch游戏手柄等,因其在人机工程学方面的优势,被广泛应用于地面移动机器人的手持式遥控系统设计。相比于语音输入、触摸屏输入,游戏手柄能够提供更为灵敏、快捷,且更加符合人类直觉的操作指令输入方式;相比于专用的操控装置,游戏手柄还能降低用户的学习成本。
4.但另一方面,在需要连续长时间进行操控的任务中,例如指挥机器人沿着道路持续前进,或者指挥机器人长时间跟随前方人员行进的任务中,不间断地连续操作手柄极易导致用户手指劳累,并严重影响后续操作。而且,由于手指的抖动、疲劳因素等,用户也难以长时间地保持对手柄摇杆的精确操作,这也会对部分任务的执行产生限制。
5.因此,如何充分发挥双摇杆手柄的直觉式操作特点,并兼顾长时间、长路程型任务对操控舒适度、轻松感的实际需求,对地面移动机器人的应用普及具有重要现实意义。
技术实现要素:
6.有鉴于此,本发明面向地面移动机器人在长时间、长路程型任务中的操控需求,提出一种基于双摇杆手柄的地面移动机器人长时长距离遥控方法,该方法通过设定几类具有直觉式特点的运动操控模式,使得用户能够灵活、轻松地实现在典型应用场景中的操控任务。
7.为实现上述目的,本发明采用的技术方案为:
8.一种基于双摇杆手柄的地面移动机器人长时长距离遥控方法,其特征在于:
9.所述地面移动机器人,具有沿身体前后方向和沿左右方向移动的能力,以及转向能力;
10.所述双摇杆手柄,包含左摇杆、右摇杆,和若干按键,所述左摇杆对应双轴偏移量输出,所述右摇杆至少对应单轴偏移量输出;摇杆在非推动情况下,对应的状态记为零输出,反之记为非零输出;所述双摇杆手柄的具体形式包括游戏手柄;
11.通过所述双摇杆手柄接收用户对所述地面移动机器人发出遥控指令以进行运动操控,运动操控的模式包含手动直控模式、手动干预模式、待机模式;
12.在所述手动直控模式中,接收用户对所述地面移动机器人的移动速度和转向速度
直接进行操控的指令,此时所述地面移动机器人处于直控运动状态;
13.所述手动干预模式包含速度保持子模式和临时直管子模式;在所述速度保持子模式中,所述地面移动机器人处于速度保持状态,速度值为vkeep,接收用户对速度值vkeep进行干预式调节指令,所述速度值vkeep的默认值为vdefault;在所述临时直管子模式中,在给定时长内接收用户地对所述地面移动机器人的移动速度和转向速度直接进行操控的指令;
14.在所述待机模式中,令所述地面移动机器人保持静止状态;
15.通过操作所述双摇杆手柄,执行所述手动直控模式、手动干预模式、待机模式的选择切换操作。
16.优选的,手动直控模式包含全向直控子模式和单向直控子模式。
17.在全向直控子模式中,双摇杆手柄中的左摇杆的上、下、左、右推动,直接对应于地面移动机器人向前、向后、向左、向右的线速度操控,双摇杆手柄中的右摇杆的左、右推动,直接对应于地面移动机器人向左转、向右转的角速度操控,双摇杆手柄中的左摇杆和右摇杆的推动幅度,对应于相应速度值的大小,若双摇杆手柄的左摇杆的双轴同时输出,则地面移动机器人的线速度由双轴偏移量共同决定,即为前后方向和左右方向的运动合成。
18.在单向直控子模式中,双摇杆手柄中的左摇杆的上、下、左、右推动,直接对应于地面移动机器人向前、向后、向左、向右的线速度操控,双摇杆手柄中的左摇杆和右摇杆的推动幅度,对应于相应速度值的大小,若双摇杆手柄的左摇杆的双轴同时输出,则地面移动机器人的线速度由双轴偏移量中的较大者决定,即为前后方向和左右方向的两者之一。
19.优选的,在当前运动操控模式为待机模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为单向直控子模式。
20.在当前运动操控模式为待机模式的情况下,若左摇杆和右摇杆其中之一为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式转换为全向直控子模式。
21.在当前运动操控模式为全向直控子模式的情况下,若左摇杆和右摇杆其中之一为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式继续保持为全向直控子模式。
22.在当前运动操控模式为全向直控子模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为单向直控子模式。
23.在当前运动操控模式为单向直控子模式的情况下,若左摇杆为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式继续保持为单向直控子模式。
24.在当前运动操控模式为单向直控子模式的情况下,若左摇杆为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式转换为全向直控子模式。
25.在当前运动操控模式为手动直控模式的情况下,若左摇杆和右摇杆均为零输出,则当前运动操控模式转换为待机模式;在当前运动操控模式为手动直控模式的情况下,若左摇杆为零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为待机模式。
26.优选的,在当前运动操控模式为速度保持子模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key2,则对速度值vkeep中沿身体前后方向的速度分量进行调节,调节的加速度值与左摇杆的上、下推动幅度直接对应,若向上推动,则加速度为正,
若向下推动,则加速度为负。
27.优选的,在当前运动操控模式为速度保持子模式的情况下,若按下双摇杆手柄中的按键key3,则当前运动操控模式转换为临时直管子模式,并将转换前的vkeep的值记录为vprev。
28.在当前运动操控模式为临时直管子模式的情况下,若保持按下双摇杆手柄中的按键key3,则当前运动操控模式继续保持为临时直管子模式,此时地面移动机器人的移动速度和转向速度由左摇杆和右摇杆的输出直接决定。
29.在当前运动操控模式为所述临时直管子模式的情况下,若未按下所述双摇杆手柄中的按键key3,则当前运动操控模式转换为所述速度保持子模式,且将所述vprev的值赋给所述vkeep。
30.优选的,在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3、按键key4和按键key5,则当前运动操控模式转换为速度保持子模式,并将vprev的值赋给vkeep。
31.在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3,且按下双摇杆手柄中的按键key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度值赋给vkeep。
32.在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3,且按下双摇杆手柄中的按键key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给vkeep。
33.优选的,在当前运动操控模式为手动直控模式的情况下,若按下双摇杆手柄中的按键key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度值赋给vkeep。
34.在当前运动操控模式为手动直控模式的情况下,若按下双摇杆手柄中的按键key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给 vkeep。
35.优选的,在当前运动操控模式为待机模式的情况下,若按下双摇杆手柄中的按键key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给vkeep。
36.在当前运动操控模式为手动干预模式的情况下,若按下双摇杆手柄中的按键key6,则当前运动操控模式转换为待机模式,令地面移动机器人保持静止状态。
37.优选的,运动操控的模式包含手动直控模式、手动干预模式、待机模式、硬锁定模式;在当前运动操控模式为硬锁定模式的情况下,除了双摇杆手柄中的按键key4、按键key6操作有效,对其余所有摇杆、按键的操作均无效。
38.在当前运动操控模式为硬锁定模式的情况下,若按下双摇杆手柄中的按键 key6,则当前运动操控模式转换为待机模式,令地面移动机器人保持静止状态。
39.在当前运动操控模式为硬锁定模式的情况下,若按下双摇杆手柄中的按键 key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度值赋给vkeep。
40.在当前运动操控模式为手动直控模式、手动干预模式、待机模式其中之一的情况下,若按下双摇杆手柄中的按键key7,则当前运动操控模式转换为硬锁定模式。
41.优选的,速度值vkeep,其值为相对大地坐标系;在速度保持子模式中,若地面移动
机器人的当前实际速度的方向与速度值vkeep在大地坐标系中的方向的偏差超过预设的阈值,则地面移动机器人自动调节转向以使得两者保持一致。
42.经由上述的技术方案可知,与现有技术相比,本发明的有益效果包括:
43.(1)运动操控模式的种类设计合理,避免因存在较多的操控模式而增加用户学习和训练的成本。每种运动操控模式,以及部分运动操控模式间的转换,按照直觉式操控原则进行设计,保证了易用性。
44.(2)将机器人遭遇紧急情况的急停需求与主动地停止待机状态相结合设计待机模式,在除该模式以外的任意一种运动操控模式下,均可以以统一的方式快速切换至待机模式,实现机器人的运动停止。
45.(3)可实现包括全方向直接控制、沿直线行走、用户临时干预以绕过前方障碍、快速调整并保持前进速度、操控意图灵活切换等功能,适合于地面移动机器人的长距离移动任务场景,具有良好的实用性。
46.(4)完全基于双摇杆手柄的操控方案易于推广移植。
附图说明
47.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
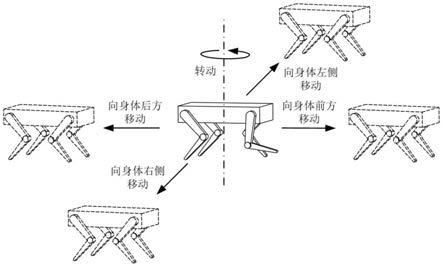
48.图1为本发明提供的地面移动机器人的一种实施例的示意图;
49.图2为本发明提供的双摇杆手柄的示意图;其中图2(a)为手柄摇杆的操作标识图,图2(b)和图2(c)为手柄按键的设定实例示意图;
50.图3为本发明提供的运动操控模式的种类及相互间切换方式的示意图;
51.图4为本发明提供的手动干预模式的应用实例的示意图;
52.图5为本发明提供的手动直控模式的应用实例的示意图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.下面结合附图对本发明的实施例作详细的描述:
55.如图1所示,一种基于双摇杆手柄的地面移动机器人长时长距离遥控方法,其所适用的地面移动机器人,具有沿身体前后方向和沿左右方向移动的能力,以及转向能力。图中展示了四足形态的地面移动机器人,其能够在身体朝向基本保持不变的情形下,向四周任意方向移动,并具有原地转向能力。除四足形态的地面移动机器人以外,装备有麦克纳姆轮的轮式机器人则提供了地面移动机器人的另一实例,其同样具有沿平地任意方向的平移能力。
56.如图2所示,双摇杆手柄包含左摇杆、右摇杆,和若干按键,左摇杆对应双轴偏移量
输出,右摇杆至少对应单轴偏移量输出;摇杆在非推动情况下,对应的状态记为零输出,反之记为非零输出;双摇杆手柄的具体形式包括游戏手柄。如图2(a)所示,左摇杆对应的输出状态用方格线填充的圆形图标表示,圆形图标内的无填充小圆圈代表左摇杆的当前位置,位于圆形图标的圆心位置对应于左摇杆零输出状态,否则对应于左摇杆非零输出状态;右摇杆对应的输出状态用横线填充的圆形图标表示,圆形图标内的无填充小圆圈代表右摇杆的当前位置,位于圆形图标的圆心位置对应于右摇杆零输出状态,否则对应于右摇杆非零输出状态。如图2(b)所示,给出了按键key1~key6的一种实际配置方案,在该方案中,按键key1~key6各自唯一对应于某一真实的手柄物理按键。如图2(c)所示,给出了按键key7的一种实际配置方案,在该方案中,按键 key7对应于两个真实的手柄物理按键的组合,即当这两个物理按键同时按下时,对应于按键key7被按下。图2所示的摇杆和按键实例仅提供了一种可能,在实际应用中可根据实际需要进行灵活配置,这种灵活配置既包含了直接设定键位,也包含了在单键对应和组合键对应上进行选择,即本发明所述的按键 key1~key7仅仅代表一种按键逻辑操作;对于某些按键,甚至可以将其实际物理按键设定为相同,例如将key1和key2设定为实际按键操作完全相同的按键;同样,对于左摇杆和右摇杆也可以灵活配置,例如将实际位于手柄左侧的摇杆设定为右摇杆,而将实际位于手柄右侧的摇杆设定为左摇杆。
57.如图3所示,用户通过双摇杆手柄对地面移动机器人发出遥控指令以进行运动操控,运动操控的模式包含手动直控模式、手动干预模式、待机模式;用户通过操作双摇杆手柄,具体包括对左、右摇杆和按键的操作,在手动直控模式、手动干预模式、待机模式中直接进行选择切换。在图3中,相应的摇杆操作图标的含义如图2(a)所示,用实线方框标识的按键代表该按键被按下,用虚线方框且以“!”标识的按键代表该按键未被按下。
58.在手动直控模式中,用户对地面移动机器人的移动速度和转向速度直接进行操控,此时地面移动机器人处于直控运动状态。
59.手动干预模式包含速度保持子模式和临时直管子模式;在速度保持子模式中,地面移动机器人处于速度保持状态,速度值为vkeep,用户对速度值vkeep 进行干预式调节,速度值vkeep的默认值为vdefault;在临时直管子模式中,用户暂时地对地面移动机器人的移动速度和转向速度直接进行操控。
60.在待机模式中,令地面移动机器人保持静止状态。
61.手动直控模式包含全向直控子模式和单向直控子模式。
62.在全向直控子模式中,双摇杆手柄中的左摇杆的上、下、左、右推动,直接对应于地面移动机器人向前、向后、向左、向右的线速度操控,双摇杆手柄中的右摇杆的左、右推动,直接对应于地面移动机器人向左转、向右转的角速度操控,双摇杆手柄中的左摇杆和右摇杆的推动幅度,对应于相应速度值的大小,若双摇杆手柄的左摇杆的双轴同时输出,则地面移动机器人的线速度由双轴偏移量共同决定,即为前后方向和左右方向的运动合成。
63.在单向直控子模式中,双摇杆手柄中的左摇杆的上、下、左、右推动,直接对应于地面移动机器人向前、向后、向左、向右的线速度操控,双摇杆手柄中的左摇杆和右摇杆的推动幅度,对应于相应速度值的大小,若双摇杆手柄的左摇杆的双轴同时输出,则地面移动机器人的线速度由双轴偏移量中的较大者决定,即为前后方向和左右方向的两者之一。单向直控子模式为用户提供了一种精确、快捷地沿机器人当前正前方、正后方、正左方、正右方
进行移动的操控方式,不会因为手指的操作偏差或颤动等导致地面移动机器人斜向运动。
64.在当前运动操控模式为待机模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为单向直控子模式。
65.在当前运动操控模式为待机模式的情况下,若左摇杆和右摇杆其中之一为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式转换为全向直控子模式。
66.在当前运动操控模式为全向直控子模式的情况下,若左摇杆和右摇杆其中之一为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式继续保持为全向直控子模式。
67.在当前运动操控模式为全向直控子模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为单向直控子模式。
68.在当前运动操控模式为单向直控子模式的情况下,若左摇杆为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式继续保持为单向直控子模式。
69.在当前运动操控模式为单向直控子模式的情况下,若左摇杆为非零输出,且此时未按下双摇杆手柄中的按键key1,则当前运动操控模式转换为全向直控子模式。
70.在当前运动操控模式为手动直控模式的情况下,若左摇杆和右摇杆均为零输出,则当前运动操控模式转换为待机模式;在当前运动操控模式为手动直控模式的情况下,若左摇杆为零输出,且同时按下双摇杆手柄中的按键key1,则当前运动操控模式转换为待机模式。
71.在当前运动操控模式为速度保持子模式的情况下,若左摇杆为非零输出,且同时按下双摇杆手柄中的按键key2,则对速度值vkeep中沿身体前后方向的速度分量进行调节,调节的加速度值与左摇杆的上、下推动幅度直接对应,若向上推动,则加速度为正,若向下推动,则加速度为负。
72.在当前运动操控模式为速度保持子模式的情况下,若按下双摇杆手柄中的按键key3,则当前运动操控模式转换为临时直管子模式,并将转换前的vkeep 的值记录为vprev。
73.在当前运动操控模式为临时直管子模式的情况下,若保持按下双摇杆手柄中的按键key3,则当前运动操控模式继续保持为临时直管子模式,此时地面移动机器人的移动速度和转向速度由左摇杆和右摇杆的输出直接决定。
74.在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3、按键key4和按键key5,则当前运动操控模式转换为速度保持子模式,并将vprev的值赋给vkeep。
75.在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3,且按下双摇杆手柄中的按键key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度值赋给vkeep。
76.在当前运动操控模式为临时直管子模式的情况下,若未按下双摇杆手柄中的按键key3,且按下双摇杆手柄中的按键key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给vkeep。
77.在当前运动操控模式为手动直控模式的情况下,若按下双摇杆手柄中的按键key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度
值赋给vkeep。
78.在当前运动操控模式为手动直控模式的情况下,若按下双摇杆手柄中的按键key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给 vkeep。
79.在当前运动操控模式为待机模式的情况下,若按下双摇杆手柄中的按键 key5,则当前运动操控模式转换为速度保持子模式,并将vdefault的值赋给 vkeep。
80.在当前运动操控模式为手动干预模式的情况下,若按下双摇杆手柄中的按键key6,则当前运动操控模式转换为待机模式,令地面移动机器人保持静止状态。
81.运动操控的模式包含手动直控模式、手动干预模式、待机模式、硬锁定模式;在当前运动操控模式为硬锁定模式的情况下,除了双摇杆手柄中的按键key4、按键key6操作有效,对其余所有摇杆、按键的操作均无效。
82.在当前运动操控模式为硬锁定模式的情况下,若按下双摇杆手柄中的按键 key6,则当前运动操控模式转换为待机模式,令地面移动机器人保持静止状态。
83.在当前运动操控模式为硬锁定模式的情况下,若按下双摇杆手柄中的按键 key4,则当前运动操控模式转换为速度保持子模式,并将地面移动机器人的当前实际速度值赋给vkeep。
84.在当前运动操控模式为手动直控模式、手动干预模式、待机模式其中之一的情况下,若按下双摇杆手柄中的按键key7,则当前运动操控模式转换为硬锁定模式。
85.速度值vkeep,其值为相对大地坐标系;在速度保持子模式中,若地面移动机器人的当前实际速度的方向与速度值vkeep在大地坐标系中的方向的偏差超过预设的阈值,则地面移动机器人自动调节转向以使得两者保持一致。这种基于大地坐标系的速度设置方式,使得机器人在因脚底/轮底打滑、动作执行误差导致朝向出现偏移后,能够自动向原朝向调节,因而适合于长距离直路段中的行进操控任务。
86.如图4所示,为地面移动机器人在手动干预模式中的运行实例。当时间未达t1时刻前,机器人的操控模式为速度保持子模式,机器人移动速度保持为定值。当用户发现前方存在障碍物后,在t1时刻按下双摇杆手柄上的key3键并保持按下,此时机器人将vkeep的值记录为vprev,并将操控模式转换为临时直管子模式;在时间未达t3时刻前,用户始终保持key3键按下,并通过左摇杆调节机器人移动速度;在t1~t2时间段,机器人以向右移动为主,在t2~t3时间段,机器人以向前移动为主,目的是使得机器人避开障碍物;在t1~t3时间段,前进速度的指令值存在波动的主要原因是用户的操作偏差。当用户成功驱动机器人绕开障碍物后,在t3时刻松开双摇杆手柄上的key3键,此时机器人将vprev 的值赋值给vkeep,并将操控模式转换恢复为速度保持子模式,此后,机器人继续按照遇到障碍物之前的速度保持行进。
87.如图5所示,为地面移动机器人在手动直控模式中的运行实例。手动直控模式是机器人在弯曲路段中通行的首选方式,但当机器人希望通过局部狭窄的直路段时,使用单向直控子模式则兼具了摇杆直接操控方向所具有的灵活性,以及方向保持的精准性。在通过调节右摇杆使得机器人方向对准直路段后,暂时地按下key1键,由全向直控子模式进入单向直控子模式,有效地帮助机器人通过该实例图中的狭窄直路段;此时,在左摇杆保持向前推动的情形下,因手指颤动和操作偏差导致的左摇杆左右小幅移动,将不会生成左、右移动指令,机器人将保持向正前方移动。在通过该直路段后,松开key1键,机器人将重新切换至
全向直控子模式。
88.以上对本发明所提供的面向大承载高动态足式机器人的变刚度单向驱动摆动关节进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
89.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1