一种网络化控制系统数据驱动控制方法及其控制器
1.本发明涉及网络化控制系统技术领域,尤其涉及一种网络化控制系统数据驱动控制方法及其控制器。
背景技术:
2.网络化控制系统(ncss)具有资源共享、交互性好、易于安装和维护等优点,已广泛应用在能源、交通、军事等领域。网络化控制系统将各元件(传感器、控制器、执行器等)通过共享数字网络连接,实现被控系统高效智能控制。但在传统的网络化控制系统中,传感器以周期触发(即时间触发)方式传输数据,造成大量的通信资源浪费。此外,如果采样周期比较小,则大量冗余采样信号将被释放到带宽有限的共享通信网络中,这必然会造成网络拥塞减低系统性能。
3.为了优化网络通信,减少冗余数据的传输,d.yue等人(a delay system method for designingevent-triggered controllers of networked control systems,ieee transaction automatic control,vol.58,no.2,pp.475-481,feb.2013)提出了基于周期采样的事件触发数据传输策略,以及基于事件触发的网络化控制系统控制器设计方法。然而,该触发策略为静态的,即触发条件只与当前系统状态有关,无法实现理想的传输效果。另外,a.girard(dynamic triggering mechanisms for event-triggered control,ieee transaction on automatic control,vol.60,no.7,pp.1992-1997,jul.2015)通过引入与历史信息相关的动态变量,给出了动态事件触发策略。该方法相比静态触发策略可以进一步降低数据传输频率。但是,连续的系统检测导致庞大的计算量以及系统额外成本。为克服这些缺点,d.liu等人(dynamic event-triggered control for linear time-invariant systems with l2-gain performance,international journal of robust nonlinear control,vol.29,no.2,pp.507-518,jan.2019)设计了一种基于周期采样的动态事件触发传输策略,并给出了基于该传输策略的网络化控制系统控制器设计方法。
4.上述列举的方法都是基于模型的,即需要采用机理建模或辨识建模的方法建立被控对象的数学模型,以此进行系统分析与控制器设计。但是,随着各类控制系统的规模不断增大,系统复杂度持续提高,基于模型的传统控制方法遇到了极大的挑战。然而,系统中的输入-状态数据是容易获得的。有效利用离、在线数据和知识,在难于建立受控系统较为准确机理模型的条件下,实现对系统的分析与控制,已成为控制理论界迫切需要解决的问题。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种网络化控制系统数据驱动控制方法及其控制器。
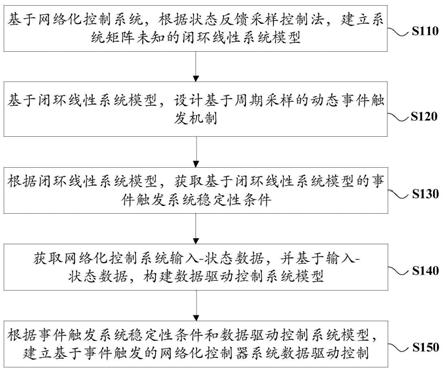
6.一种网络化控制系统数据驱动控制方法,所述方法包括:基于网络化控制系统,根据状态反馈采样控制法,建立系统矩阵未知的闭环线性系统模型;基于所述闭环线性系统模型,设计基于周期采样的动态事件触发机制;根据所述闭环线性系统模型,获取基于所述
闭环线性系统模型的事件触发系统稳定性条件;获取所述网络化控制系统输入-状态数据,并基于所述输入-状态数据,构建数据驱动控制系统模型;根据所述事件触发系统稳定性条件和所述数据驱动控制系统模型,建立基于事件触发的网络化控制器系统数据控制。
7.在其中一个实施例中,所述系统矩阵未知的闭环线性系统模型,具体为:其中表示系统的状态;a,b为未知的适当维度矩阵;u(t)为控制输入,且采用状态反馈采样控制为u(t)=kx(tk),t∈[tk,t
k+1
),其中k为控制增益矩阵,为有序采样时间序列。
[0008]
在其中一个实施例中,所述动态事件触发机制,具体为:
[0009][0010]
其中,min表示最小值;h表示传感器的采样时间间隔,并满足i表示采样个数;tk为上一采样信号传输时刻;t
k+1
为下一采样信号传输时刻;ρ(t)为触发判别函数。
[0011]
在其中一个实施例中,所述触发判别函数,具体为:
[0012][0013]
其中,ω为权矩阵且满足σ1>0,σ2>0,θ≥0为待设计触发参数;采样状态误差表示上一传输时刻状态值x(tk)与当前采样状态值x(tk+ih)之间的误差,其中i=0,1,
…
,m且有上标t符号表示矩阵的转置。另外,动态阈值η(t)满足如下微分方程:
[0014][0015]
其中,初始值η(0)>0,以及λ>0为给定参数。上一采样信号在时刻tk被传输后,只有当前采样信号满足触发条件时,采样信号被传输至控制器。
[0016]
在其中一个实施例中,所述基于所述闭环线性系统模型的事件触发系统稳定性条件,具体为:对于给定的参数σ1>0,σ2>0,λ>0和θ≥0,如果存在矩阵s=s
t
,n,m,g,以及所有和使得以下线性矩阵不等式成立:
[0017][0018][0019]
其中,
[0020][0021]
λ:=nπ6+mπ7+(nπ6+mπ7)
t
[0022]
[0023][0024]
γ:=(l1+l2)
t
g(al1+bkl
7-l2)+[(l1+l2)
t
g(al1+bkl
7-l2)]
t
[0025][0026][0027][0028]
п6:=[(l
1-l3)
t
,(l1+l
3-2l5)
t
]
t
,п7:=[(l
4-l1)
t
,(l4+l
1-2l6)
t
]
t
[0029][0030]
li:=[0n×
(i-1)n
,in,0n×
(7-i)n]
,(i=1,...,7),l0:=0n×
7n
。
[0031]
在其中一个实施例中,所述数据驱动控制系统模型,具体为:
[0032][0033]
其中,
[0034][0035][0036][0037]
x:=[x(t1)x(t2)...x(t
ρ
)]
[0038]
u:=[u(t1)u(t2)...u(t
ρ
)]
[0039]
为在离散时间点ti∈[0,t]采集获得数据集合;为已知列满秩矩阵。
[0040]
一种网络化控制系统数据驱动控制器,其特征在于,所述控制器通过上述权利要求中任一项所述的一种网络化控制系统数据驱动控制方法进行数据驱动控制。
[0041]
本发明有益效果:上述一种网络化控制系统数据驱动控制方法及其控制器,通过基于网络化控制系统,根据状态反馈采样控制法,建立系统矩阵未知的闭环线性系统模型;并基于该模型,设计基于周期采样的动态事件触发机制;根据该模型,获取基于闭环线性系统模型的事件触发系统稳定性条件;进一步获取网络化控制系统输入-状态数据,用于构建数据驱动控制系统模型;根据稳定性条件和数据驱动控制系统模型,实现对网络化控制器系统的数据驱动控制。首先,采用本方案可实现在系统模型未知的情况下,无需系统辨识,利用系统数据设计控制器参数,保证系统稳定运行,具有普适性;其次,本方案采用了基于周期采样的动态事件触发传输策略,与传统的时间触发与事件触发策略相比,能在保证系统稳定特性的情况下,减少网络中数据的传输,节约通信资源;最后,本方案所实现的数据驱动方法,首次实现了在事件触发策略下的网络化控制系统,仅使用收集到的输入-状态数据联合设计事件触发参数以及控制器。
附图说明
[0042]
图1为一个实施例中一种基于事件触发与数据驱动控制方法的网络化系统结构示意图;
[0043]
图2为一个实施例中一种网络化控制系统数据驱动控制方法的流程示意图;
[0044]
图3为一个实施例中控制器作用下的网络化控制系统状态轨迹图;
[0045]
图4是一个实施例中控制器作用下的事件触发间隔与触发时刻。
具体实施方式
[0046]
为了使本发明的目的、技术方案及优点更加清楚明白,下面通过具体实施方式结合附图对本发明做进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0047]
本技术提供的一种网络化控制系统数据驱动控制方法,适用于系统模型未知的情况。如图1所示,网络化控制系统包括物理系统、传感器、采样器、控制器、零阶保持器和执行器。控制器为数据驱动反馈控制器,其中控制器增益由系统数据计算获得。传感器与采样器中间设置事件触发机制,触发后的数据通过网络传输给控制器。图3为事件触发机制下的网络化控制系统状态轨迹图。图4为事件触发间隔与触发时刻。
[0048]
在一个实施例中,如图2所示,提供了一种网络化控制系统数据驱动控制方法,包括以下步骤:
[0049]
s110基于网络化控制系统,根据状态反馈采样控制法,建立系统矩阵未知的闭环线性系统模型。
[0050]
在一个实施例中,步骤s110中的系统矩阵未知的闭环线性系统模型,具体为:
[0051][0052]
其中表示系统的状态;a,b为未知的适当维度矩阵;u(t)为控制输入,且采用状态反馈采样控制为u(t)=kx(tk),t∈[tk,t
k+1
),其中k为控制增益矩阵,为有序采样时间序列。
[0053]
具体地,网络化控制系统中含有物理系统、传感器、控制器和执行器。其中表示系统的状态;a,b为未知的适当维度矩阵;u(t)为控制输入。控制信号经过采样器在有序离散点被传输至反馈控制器,此时控制输入表示为u(t)=kx(tk),t∈[tk,t
k+1
),其中k为控制增益矩阵。
[0054]
s120基于闭环线性系统模型,设计基于周期采样的动态事件触发机制。
[0055]
在一个实施例中,步骤s120中的动态事件触发机制,具体为:
[0056][0057]
其中,min表示最小值;h表示传感器的采样时间间隔,并满足i表示采样个数;tk为上一采样信号传输时刻;t
k+1
为下一采样信号传输时刻;ρ(t)为触发判别函数。
[0058]
在一个实施例中,触发判别函数,具体为:
[0059][0060]
其中,ω为权矩阵且满足σ1>0,σ2>0,θ≥0为待设计触发参数;采样状态误差表示上一传输时刻状态值x(tk)与当前采样状态值x(tk+ih)之间的误差,其中i=0,1,
…
,m且有上标t符号表示矩阵的转置。另外,动态阈值η(t)满足如下微分方程:
[0061][0062]
其中,初始值η(0)>0,以及λ>0为给定参数。
[0063]
上一采样信号在时刻tk被传输后,只有当前采样信号满足触发条件时,采样信号被传输至控制器。
[0064]
s130根据闭环线性系统模型,获取基于闭环线性系统模型的事件触发系统稳定性条件。
[0065]
在一个实施例中,步骤s130中的基于所述闭环线性系统模型的事件触发系统稳定性条件,具体为:
[0066]
对于给定的参数σ1>0,σ2>0,λ>0和θ≥0,如果存在矩阵>0,λ>0和θ≥0,如果存在矩阵s=s
t
,n,m,g,以及所有和使得以下线性矩阵不等式成立:
[0067][0068][0069]
其中,
[0070][0071]
λ:=nπ6+mπ7+(nπ6+mπ7)
t
[0072][0073][0074]
γ:=(l1+l2)
t
g(al1+bkl
7-l2)+[(l1+l2)
t
g(al1+bkl
7-l2)]
t
[0075][0076][0077][0078]
π6:=[(l
1-l3)
t
,(l1+l
3-2l5)
t
]
t
,π7:=[(l
4-l1)
t
,(l4+l
1-2l6)
t
]
t
[0079]
li[0n×
(i-1)n
,in,0n×
(7-i)n
],(i=1,...,7),l0:=0n×
7n
。
[0080]
具体地,基于系统稳定性定理给出保证基于步骤s120中的触发策略的网络化控制
系统稳定的充分性条件,具体为:
[0081]
s131、稳定性定理描述为:假设存在一个连续可微函数v0(x(t)),以及一个分段连续函数v
l
(x(t),t),对于所有t∈[tk,t
k+1
)满足:
[0082]
(1)存在标量c1>0,c2>0,以及c1||x||
p
≤va(x)≤c2||x||
p
;
[0083]
(2)
[0084]
(3)对于所有t∈(tk,t
k+1
),
[0085]
于是,系统是渐进稳定的。
[0086]
s132、根据上述s131构造函数v0(x(t)),v
l
(x(t),t),分别为:
[0087]v0
(x(t))=x
t
(t)px(t)+η(t)
[0088][0089]
对于t∈dj,d
j+1
),其中
[0090]dj
=tk+jh
[0091][0092]
τ1:=d
j+1-t,τ2:=t-dj[0093][0094][0095]
s133、对s132中构造的函数求导为:
[0096][0097]
其中,
[0098][0099][0100][0101]
γ:=(l1+l2)
t
g(al1+bkl
7-l2)+[(l1+l2)
t
g(al1+bkl
7-l2)]
t
[0102][0102][0102][0103]
γ6:=(l
1-l3)
t
,(l1+l
3-2l5)
t
]
t
,π7:=[(l
4-l1)
t
,(l4+l
1-2l6)
t
]
t
[0104]
li:=[0n×
(i-1)n
,in,0n×
(7-i)n
],(i=1,...,7),l0:=0n×
7n
[0105][0106]
s134、利用积分不等式对s133中的积分项进行估计:
[0107][0108][0109]
其中
[0110][0111]
s135、根据上述s131、s132、s133、s134以及舒尔引理获得基于模型的事件触发系统稳定性条件为:
[0112]
舒尔引理,即schur's lemma是群与代数的表示论中一个初等但非常有用的命题。在群的情形是说,如果m与n是群g的两个有限维不可约表示,φ是从m到n的与群作用可交换的线性映射,那么φ可逆或φ=0。一个重要的特例是m=n而φ是一个到自身的映射。对于给定的参数σ1>0,σ2>0,λ>0和θ≥0,如果存在矩阵s=s
t
,n,m,g,以及所有和使得以下线性矩阵不等式成立:
[0113][0114][0115]
其中,
[0116]
λ:=nπ6+mπ7+(nπ6+mπ7)
t
[0117]
于是,通过上述计算可知,步骤s110中的系统在步骤s120中的触发条件下是渐进稳定的。
[0118]
s140获取网络化控制系统输入-状态数据,并基于输入-状态数据,构建数据驱动控制系统模型。
[0119]
在一个实施例中,步骤s140中的数据驱动控制系统模型,具体为:
[0120][0121]
其中
[0122][0123][0124][0125]
x:=[x(t1) x(t2) ... x(t
ρ
)]
[0126]
u:=[u(t1) u(t2) ... u(t
ρ
)]
[0127]
为在离散时间点ti∈[0,t]采集获得数据集合;为已知列满秩矩阵。
[0128]
具体地,构建步骤s110中未知系统数据驱动系统模型,具体为:
[0129]
s141、根据步骤s110中未知系统构造如下扰动系统:
[0130][0131]
其中为已知列满秩矩阵,代表未知噪声干扰。
[0132]
s142、构造数据矩阵为:
[0133][0134]
x:=[x(t1) x(t2) ... x(t
ρ
)]
[0135]
u:=[u(t1) u(t2) ... u(t
ρ
)]
[0136]
w:=[w(t1) w(t2) ... w(t
ρ
)]
[0137]
其中为在离散时间点ti∈[0,t]采集获得数据集合为;为假设未知噪声序列。基于步骤4.1)系统表达式可知:
[0138][0139]
s143、构造未知噪声广义模型为:
[0140][0141]
其中和获已知矩阵。
[0142]
s144、基于s142的数据矩阵与步骤s143的噪声模型构建数据驱动系统模型为:
[0143][0144]
其中
[0145][0146][0147]
s150根据事件触发系统稳定性条件和数据驱动控制系统模型,建立基于事件触发的网络化控制器系统数据驱动控制。
[0148]
具体地,步骤s150即为结合基于模型的稳定性条件与数据驱动系统模型,给出事件触发网络化控制系统数据驱动控制器设计方法,包括以下步骤:
[0149]
s151、构造步骤s110中系统等价系统模型:
[0150][0151]
其中为非奇异矩阵;x(t)=gz(t);kc:=kg。
[0152]
s152、基于s151中的等价系统系统模型以及步骤s135中基于模型的稳定性条件,得到数据驱动控制器设计方法为:
[0153]
对于给定的参数σ1>0,σ2>0,λ>0和θ≥0,如果存在标量ε>0,矩阵s=s
t
,n,m,g,kc以及所有和使得以下线性矩阵不等式成立:
[0154][0155][0156]
其中,
[0157][0158][0159][0160]
于是,步骤s110中的系统在步骤s120中的触发条件下是渐进稳定的,并且状态反馈控制器增益为k=kcg-1
。
[0161]
在一个实施例中,提供了一种网络化控制系统数据驱动控制器,控制器通过上述一种网络化控制系统数据驱动控制方法进行数据驱动控制。具体地,可基于上述设计方法获得一种网络化控制系统数据驱动控制器。
[0162]
在一个实施例中,通过对网络化控制系统进行仿真试验来完成本发明控制器设计方法的性能分析与有效性证明,具体为:
[0163]
考虑如下系统模型参数:
[0164][0165]
给定系统输入u(t)∈[-1,1],在离散时间点ti∈[1,100]获得测量数据集其中离散点间隔设置为:
[0166][0167]
设置外部噪声为w(t)∈[-0.01,0.01]。根据步骤s143未知噪声广义模型,可知qd=-i,sd=0,rd=0.012ρi,(ρ=100)。
[0168]
设置动态事件触发参数h=0.1,σ1=0.2,σ2=0.1,λ=1和θ=1。根据步骤s152的线性矩阵不等式,得到事件触发矩阵以及控制器增益为:
[0169][0170]
k=[-0.8661
ꢀ‑
6.0541]
[0171]
设置初始状态x(0)=[3,-2]
t
,获得在时间t∈[0,30]内的系统仿真轨迹图,如图3所示。系统状态在设计控制器作用下趋向于零点,说明了本发明控制器设计方法的有效性。
图4描述了事件触发间隔与触发时刻。在时间t∈[0,30]内,仅有12个采样信号被传输,极大地减少了传输负荷,这说明了本方案设计的动态事件触发策略可以节约网络资源。
[0172]
上述实施例中,通过基于网络化控制系统,根据状态反馈采样控制法,建立系统矩阵未知的闭环线性系统模型;并基于该模型,设计基于周期采样的动态事件触发机制;根据该模型,获取基于闭环线性系统模型的事件触发系统稳定性条件;进一步获取网络化控制系统输入-状态数据,用于构建数据驱动控制系统模型;根据稳定性条件和数据驱动控制系统模型,实现对网络化控制器系统的数据驱动控制。首先,采用本方案可实现在系统模型未知的情况下,无需系统辨识,利用系统数据设计控制器参数,保证系统稳定运行,具有普适性;其次,本方案采用了基于周期采样的动态事件触发传输策略,与传统的时间触发与事件触发策略相比,能在保证系统稳定特性的情况下,减少网络中数据的传输,节约通信资源;最后,本方案所实现的数据驱动方法,首次实现了在事件触发策略下的网络化控制系统,仅使用收集到的输入-状态数据联合设计事件触发参数以及控制器。
[0173]
显然,本领域的技术人员应该明白,上述本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在计算机存储介质(rom/ram、磁碟、光盘)中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。所以,本发明不限制于任何特定的硬件和软件结合。
[0174]
以上内容是结合具体的实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1