一种基于注排水的水下潜器自动悬停控制系统和控制方法与流程
1.本发明属于水下潜器操纵控制技术领域,具体涉及一种基于注排水的水下潜器自动悬停控制系统和控制方法。
背景技术:
2.水下潜器在执行任务过程中存在水下悬停的工况需求,如常规潜艇有水下悬停的战术战法,且悬停时可提高声呐探测距离;多任务潜艇的特种作战需求,如搭载、布放和回收都要求潜艇处于水下悬停状态。由于水下海洋环境复杂,通过注排水来实时改变潜器浮力和重力的关系是一种重要的控制手段,但是需要操纵人员根据深度差来自行判断注排水量及注排水的时机,由于水下潜器的运动惯性大,具有明显的时滞效应,导致水下悬停的稳定精度严重依赖于操纵人员的经验。
技术实现要素:
3.本发明要解决的技术问题是:提供一种基于注排水的水下潜器自动悬停控制系统和控制方法,用于实现基于注排水的水下潜器自动悬停。
4.本发明为解决上述技术问题所采取的技术方案为:一种基于注排水的水下潜器自动悬停控制系统,包括反馈控制律模块、微分器和离散模块、注排水系统和深度测量系统;反馈控制律模块的信号接收端分别连接上位机和深度测量系统的信号发送端,反馈控制律模块的信号发送端分别连接微分器和离散模块的信号发送端,用于接收悬停目标深度信号、深度变化速率信号和实时深度信号,根据实时深度与悬停目标深度之差、深度变化速率进行线性加权运算,得到中间控制量并发送给微分器和离散模块;微分器用于对中间控制量进行微分,获取深度微分信号;离散模块的信号发送端连接注排水系统的信号接收端,用于发送注水信号或排水信号;注排水系统作用于水下潜器,实现自动悬停控制。
5.按上述方案,微分器采用跟踪微分器结构,跟踪微分器的设计参数为r和h,设水下潜器在t=k*t时刻的深度值为v(k),同时刻的跟踪值为x1(k),同时刻的微分值为x2(k),最速控制综合函数为fhan(),则离散形式为:
[0006][0007]
进一步的,对参数h取计算周期;参数r决定过渡过程的长短,r越大,过渡过程越短,给系统的冲击越大,r越小,过渡过程越长,冲击越小;对水下潜器取h=0.1,r=5。
[0008]
按上述方案,设深度差的线性加权系数为k
p
,深度变化速率的线性加权系数为kd,两者符号一致,反馈控制律模块采用pd控制计算中间控制量con_temp为:
[0009]
con_temp(k)=k
p
×
(ζ
cmd
(k)-ζ
rt
(k))+kdζ
rt_dif
(k)。
[0010]
进一步的,离散模块将连续的中间控制量con_temp按照离散规则进行离散化以匹配注排水系统,生成注排水指令并发送给注排水系统实施注排水;离散模块的离散规则如
下:
[0011]
若((a1<con_temp<b1)&(ζ
rt_dif
>0))||(con_temp>b1),则con=-1,发送排水指令;
[0012]
若((b2<con_temp<a2)&(ζ
rt_dif
<0))||(con_temp<b2),则con=1,发送注水指令;
[0013]
若均不满足上述条件,则con=0,既不发送排水指令也不发送注水指令。
[0014]
进一步的,反馈控制律模块的k
p
、kd及离散模块的a、b的具体数值通过水下潜器的运动参数和数字仿真迭代确定。
[0015]
一种基于注排水的水下潜器自动悬停控制方法,包括以下步骤:
[0016]
s0:搭建自动悬停控制系统,包括反馈控制律模块、微分器和离散模块、注排水系统和深度测量系统;反馈控制律模块的信号接收端分别连接上位机和深度测量系统的信号发送端,反馈控制律模块的信号发送端分别连接微分器和离散模块的信号发送端,离散模块的信号发送端连接注排水系统的信号接收端,注排水系统作用于水下潜器;
[0017]
s1:反馈控制律模块接收深度测量系统发送的深度变化速率信号、深度测量信号,接收上位机发送的悬停目标深度,进行线性加权后得到连续的中间控制量,并分别发送给微分器和离散模块;
[0018]
s2:微分器将中间控制量微分后发送给离散模块;
[0019]
s3:离散模块接收到中间控制量及其微分信号后,根据离散规则将连续的中间控制量进行离散化,得到注排水指令:
[0020]
s4:注排水系统接收到注排水指令后实施注水操作或排水操作或不操作,改变潜器的重力与浮力的平衡关系、改变潜器的深度,实现自动悬停控制。
[0021]
进一步的,所述的步骤s3中,具体步骤为:
[0022]
当中间控制量con_temp满足以下两种情形的任何一种时,发出排水指令:
[0023]
1)con_temp位于(a1,b1)区间内,且con_temp处于变大的过程中;
[0024]
2)con_temp>b1;
[0025]
当中间控制量con_temp满足以下两种情形的任何一种时,发出注水指令:
[0026]
3)con_temp位于(b2,a2)区间内,且con_temp处于变小的过程中;
[0027]
4)con_temp<b2;
[0028]
当中间控制量不满足以上四种情形时,取消当前的注水指令或者排水指令,既不注水也不排水。
[0029]
进一步的,在悬停过程中实时进行步骤s1至s3的解算,解算周期为0.1s。
[0030]
一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种基于注排水的水下潜器自动悬停控制方法。
[0031]
本发明的有益效果为:
[0032]
1.本发明的一种基于注排水的水下潜器自动悬停控制系统和控制方法,根据潜器的实时深度、悬停目标深度、深度变化速率,实时自动计算生成注排水指令,实现了基于注排水的水下潜器自动悬停。
[0033]
2.本发明适用于具有注排水能力的水下潜器,能够在一定初始不均衡量的情况下,自动控制注排水,实施水下潜器的自动悬停,满足水下潜器对于深度自动保持的需求。
在300l初始不均衡量、均匀密度层条件下,实现了水下潜器深度稳定精度为
±
5m的自动悬停。
[0034]
3.本发明不需要依赖操纵人员的操纵经验,悬停控制精度稳定可靠。
附图说明
[0035]
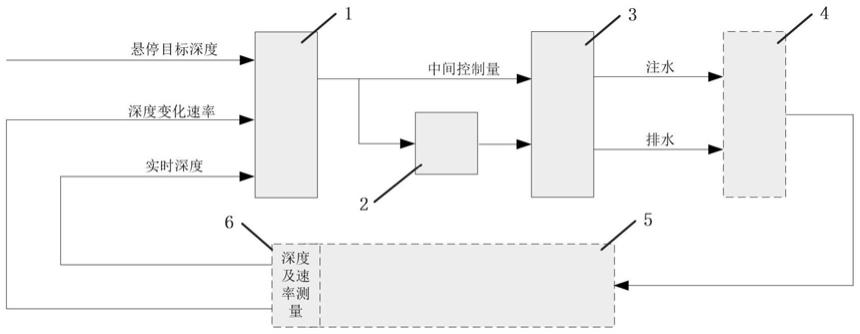
图1是本发明实施例的原理框图。
[0036]
图2是本发明实施例的离散曲线图。
[0037]
图3是本发明实施例的微分器测试框图图。
[0038]
图4是本发明实施例的微分器测试结果图。
[0039]
图5是本发明实施例的仿真平台的原理框图。
[0040]
图6是本发明实施例的悬停控制器的原理框图。
[0041]
图7是本发明实施例的深度变化仿真曲线图。
[0042]
图8是本发明实施例的注排水状态曲线图。
[0043]
图中:1.反馈控制律;2.微分器;3.离散模块;4.注排水系统;5.潜器;6.深度测量系统。
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0045]
参见图1,本发明的实施例包括反馈控制律1、微分器2、离散模块3。
[0046]
微分器2对中间控制量进行微分,获取深度微分信号;微分器2采用跟踪微分器结构,离散形式为:
[0047][0048]
其中v(k)为t=k*t时刻深度测量采集的深度值,x1(k)为同时刻跟踪值,x2(k)为同时刻微分值。其中fhan()为最速控制综合函数。跟踪微分器2的设计参数为r和h,h一般取计算周期,r决定了过渡过程的长短,r越大,过渡过程越短,给系统的冲击越大,r越小,过渡过程越长,冲击越小,水下潜器的运动变化较缓慢,故一般h=0.1,r=5。对选定的微分器2进行测试,测试框图如图3所示。测试信号为:y=sin(t),在t=5s时开启测试,测试结果如图4所示,其结果与理想微分信号基本一致。
[0049]
反馈控制律1根据当前深度与悬停深度之差、深度变化速率进行线性加权运算,得到中间控制量con_temp(k),中间控制量每时刻实时生成,为连续量;反馈控制律1采用pd控制,形式为:
[0050]
con_temp(k)=k
p
×
(ζ
cmd
(k)-ζ
rt
(k))+kdζ
rt_dif
(k)
[0051]
其中k
p
、kd分别为深度差、深度变化速率的线性加权系数,其符号一致,具体正负结合离散模块3的判定而确定。
[0052]
离散模块3将连续的中间控制量con_temp按照离散规则进行离散化以匹配注排水系统,生成注排水指令,发送给注排水执行机构实施注排水,参见图2所示的曲线。离散模块3的离散规则如下:
[0053]
if((a1<con_temp<b1)&(ζ
rt_dif
>0))||(con_temp>b1)
[0054]
con=-1;//排水
[0055]
elseif((b2<con_temp<a2)&(ζ
rt_dif
<0))||(con_temp<b2)
[0056]
con=1;//注水
[0057]
else
[0058]
con=0;//既不注水也不排水
[0059]
反馈控制律1的k
p
、kd及离散模块3的a、b的具体数值通过水下潜器的运动参数和数字仿真迭代确定。
[0060]
下面以某水下潜器为例,给出反馈控制律和离散模块的实施例。
[0061]
取k
p
=1.3,kd=600,反馈控制律为:
[0062]
con_temp(k)=1.3
×
(ζ
cmd
(k)-ζ
rt
(k))+600ζ
rt_dif
(k)
[0063]
取a1=5,a2=-5,b1=11,b2=-11,离散规则为:
[0064]
if((5<con_temp<11)&(ζ
rt_dif
>0))||(con_temp>11)
[0065]
con=-1;//排水
[0066]
elseif((-11<con_temp<-5)&(ζ
rt_dif
<0))||(con_temp<-11)
[0067]
con=1;//注水
[0068]
else
[0069]
con=0;//既不注水也不排水
[0070]
本发明的自动悬停控制方法包括以下步骤:
[0071]
s0:搭建自动悬停控制系统,如图6所示;搭建水下潜器悬停运动数字仿真平台,如图5所示;
[0072]
s1:反馈控制律1接收深度测量系统6发送的深度变化速率信号、深度测量信号,结合指令端发送的悬停目标深度,线性加权后得到连续的中间控制量;
[0073]
s2:微分器2将中间控制量微分后送给离散模块3;
[0074]
s3:离散模块3接收到中间控制量及其微分信号后,根据离散规则将连续中间控制量进行离散化,得到注水、排水指令:
[0075]
当中间控制量con_temp满足以下两种情形下的任何一种时,发出排水指令:
[0076]
a)con_temp位于(a1,b1)区间内,且con_temp处于变大的过程中;
[0077]
b)con_temp>b1。
[0078]
当中间控制量con_temp满足以下两种情形下的任何一种时,发出注水指令:
[0079]
a)con_temp位于(b2,a2)区间内,且con_temp处于变小的过程中;
[0080]
b)con_temp<b2。
[0081]
当中间控制量不满足以上四种情形时,取消当前的注水或者排水指令,既不注水也不排水。
[0082]
s4:潜器注排水系统4接收到注水、排水指令后实施注水或者排水;
[0083]
s5:注水或排水改变潜器5的重力与浮力的平衡关系、改变潜器的深度,从而实施自动悬停。
[0084]
本发明在悬停过程中实时解算,解算周期为0.1s。在300l初始不均衡量下、均衡密度层时,经仿真,深度变化在
±
5m以内,如图7所示;自动悬停过程中注排水状态如图8所示,
图中纵轴为1代表注水,纵轴坐标为-1代表排水,纵轴坐标为0代表不注水也不排水。
[0085]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1