一种蔬菜立体栽培智能物流工作系统
1.本发明属于蔬菜立体栽培工厂化技术领域,尤其涉及一种蔬菜立体栽培智能物流工作系统。
背景技术:
2.目前,随着科技的不断进步,人们也在不断改进农业种植方法,开始将科学技术应用在农业生产中。近年来,我国开始大力提倡设施蔬菜培养以及立体栽培模式,与传统种植模式相比拥有诸多优势,能够有效提高产品的产量和质量。
3.然而现有的蔬菜立体栽培技术依然是依赖于人实现的,无法实现智能化的蔬菜栽培或输送。
4.通过上述分析,现有技术存在的问题及缺陷为:现有的蔬菜立体栽培技术依然是依赖于人实现的,无法实现智能化的蔬菜栽培或输送。
技术实现要素:
5.针对现有技术存在的问题,本发明提供了一种蔬菜立体栽培智能物流工作系统。
6.本发明是这样实现的,一种蔬菜立体栽培智能物流工作系统,所述蔬菜立体栽培智能物流工作系统包括:
7.环境信息采集模块、蔬菜信息采集模块、温湿度数据采集模块、中央控制模块、判断模块、三维模型构建模块、坐标确定模块、栽培区控制模块、蔬菜上下架管理模块、路径规划模块以及输送控制模块;
8.蔬菜信息采集模块,与中央控制模块连接,用于采集待栽培的蔬菜的类型、适宜的光照、温度、湿度及其他相关数据;用于利用摄像设备采集栽培过程中的蔬菜的影像数据;同时用于向蔬菜发送红外线并获取蔬菜红外吸收度;
9.判断模块,与中央控制模块连接,用于基于采集的蔬菜的影像数据、红外吸收度以及蔬菜相关信息判断待上架蔬菜于栽培区需放置位置或待收割蔬菜需放置的收割线位置以及蔬菜是否成熟;
10.栽培区控制模块,与中央控制模块连接,用于基于采集的蔬菜栽培适宜温湿度数据以及采集的当前栽培架的温湿度数据进行温湿度的调节;
11.所述基于采集的蔬菜栽培适宜温湿度数据以及采集的当前栽培架的温湿度数据进行温湿度的调节包括:
12.采用如下公式进行温度的控制:
13.s=0;
14.s=1;
15.式中:表示t时刻的栽培架温度,℃;表示t+1时刻的蔬菜栽培适宜温度,℃;c为等效热容,j/℃;r为等效热阻,℃/w;s为空调启停状态变量,1表示空调启动,0表示空调停止;δt为仿真时间间隔;
16.温湿度的调节模型如下:
[0017][0018]
式中aj,bj为系数矩阵,j=1,2,
…
,2m,x=[x1,x2]t为状态变量,x1为栽培架的温度,x2栽培架的湿度,u为扰动输入量,标号j表示第j个栽培架;
[0019]
蔬菜上下架管理模块,与中央控制模块连接,用于利用机械手基于确定的待上架蔬菜于栽培区需放置位置进行蔬菜的上架;同时用于当判断蔬菜成熟后进行蔬菜的下架;
[0020]
路径规划模块,与中央控制模块连接,用于基于构建的工作区域的三维模型以及判断的位置数据、坐标数据规划移动式机器人输送蔬菜的路径;
[0021]
输送控制模块,与中央控制模块连接,用于利用移动式机器人基于规划的路径进行蔬菜的输送控制。
[0022]
进一步,所述蔬菜立体栽培智能物流工作系统还包括:
[0023]
环境信息采集模块,与中央控制模块连接,用于利用输入设备进行工作区域的图纸采集,同时利用摄像设备采集实际工作区域、工作设备的相关影像数据;
[0024]
温湿度数据采集模块,与中央控制模块连接,用于采集栽培区各个栽培架的温度、湿度数据;
[0025]
中央控制模块,与环境信息采集模块、蔬菜信息采集模块、温湿度数据采集模块、判断模块、三维模型构建模块、坐标确定模块、栽培区控制模块、蔬菜上下架管理模块、路径规划模块以及输送控制模块连接,用于利用单片机或控制器控制各个模块正常工作;
[0026]
三维模型构建模块,与中央控制模块连接,用于基于采集的环境信息以及影像数据进行工作区域的三维模型构建;
[0027]
坐标确定模块,与中央控制模块连接,用于确定工作区域中栽培区、收割区的位置坐标以及相应区域的栽培架或收割线的坐标。
[0028]
进一步,所述工作区域包括:栽培区、收割区以及其他区。
[0029]
进一步,所述三维模型构建模块基于采集的环境信息以及影像数据进行工作区域的三维模型构建包括:
[0030]
(1)基于采集的工作区域的图纸数据,获取用于组建工作区域的各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素;
[0031]
(2)根据所述所述屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素,生成屋顶、墙面体、地基、内柱、天花板的三维模型;
[0032]
(3)基于获取的工作区域的图纸利用屋顶、墙面体、地基、内柱、天花板的三维模型构建工作区域的三维模型,且所述三维模型包括墙体部分、以及设置于墙体内部的栽培区、收割区以及其他区;
[0033]
(4)利用采集的工作区域的影像区域进行构建的三维模型的验证;当验证通过时,
不执行其他处理;当验证不通过时,基于获取的环境信息以及图纸结合实际影像数据进行适应性调整,直至验证通过。
[0034]
进一步,步骤(1)中,所述基于采集的工作区域的图纸数据,获取用于组建工作区域的各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素包括:
[0035]
根据不同类型模块组件所属的预设拆分规则,分别对工作区域图纸进行拆分,获得各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素;
[0036]
将所述屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件进行参数化,确定各个组件对应的参数表。
[0037]
进一步,所述判断模块基于基于采集的蔬菜的影像数据、红外吸收度以及蔬菜相关信息判断蔬菜是否成熟包括:
[0038]
获取采集的蔬菜的影像数据,根据所述蔬菜的图像信息识别蔬菜种类;
[0039]
基于红外光谱数据库,确定相应蔬菜种类对应的红外线波段;基于蔬菜数据库,确定相应蔬菜种类的标准成熟高度、成熟图像特征信息;
[0040]
获取所述蔬菜对红外线的吸收度以及对应的高度、图像特征信息判断是否与数据库中存储的红外线波段、标准成熟高度、成熟图像特征信息是否一致;若一致,则判断蔬菜成熟。
[0041]
进一步,所述根据所述蔬菜的图像信息识别蔬菜种类包括:
[0042]
构建基于卷积神经网络的蔬菜分类识别模型;
[0043]
将蔬菜的图像信息输入构建的蔬菜分类识别模型进行分类识别。
[0044]
本发明的另一目的在于提供一种信息数据处理终端,其特征在于,所述信息数据处理终端用于实现所述蔬菜立体栽培智能物流工作系统。
[0045]
本发明的另一目的在于提供一种存储在计算机可读介质上的计算机程序产品,包括计算机可读程序,供于电子装置上执行时,提供用户输入接口以应用所述蔬菜立体栽培智能物流工作系统。
[0046]
本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机应用所述蔬菜立体栽培智能物流工作系统。
[0047]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明能够在蔬菜立体栽培物流工作区域内基于蔬菜的种类以及生长所需的光照、温湿度等数据进行蔬菜的排列以及自动上架栽培,同时智能化的调节蔬菜生长的温湿度环境,并基于图像自动化的进行蔬菜的成熟度检测,并及时下架收割处理,实现智能自动化生产。
附图说明
[0048]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0049]
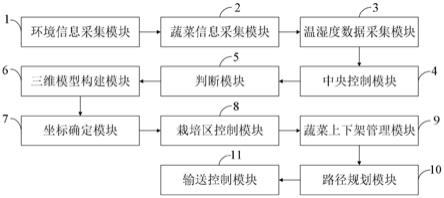
图1是本发明实施例提供的蔬菜立体栽培智能物流工作系统结构示意图;
[0050]
图中:1、环境信息采集模块;2、蔬菜信息采集模块;3、温湿度数据采集模块;4、中央控制模块;5、判断模块;6、三维模型构建模块;7、坐标确定模块;8、栽培区控制模块;9、蔬菜上下架管理模块;10、路径规划模块;11、输送控制模块。
[0051]
图2是本发明实施例提供的三维模型构建模块基于采集的环境信息以及影像数据进行工作区域的三维模型构建的方法流程图。
[0052]
图3是本发明实施例提供的基于采集的工作区域的图纸数据,获取用于组建工作区域的各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素的方法流程图。
[0053]
图4是本发明实施例提供的判断模块基于基于采集的蔬菜的影像数据、红外吸收度以及蔬菜相关信息判断蔬菜是否成熟的方法流程图。
[0054]
图5是本发明实施例提供的根据蔬菜的图像信息识别蔬菜种类的方法流程图。
具体实施方式
[0055]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0056]
针对现有技术存在的问题,本发明提供了一种蔬菜立体栽培智能物流工作系统,下面结合附图对本发明作详细的描述。
[0057]
如图1所示,本发明实施例提供的蔬菜立体栽培智能物流工作系统包括:
[0058]
环境信息采集模块1,与中央控制模块4连接,用于利用输入设备进行工作区域的图纸采集,同时利用摄像设备采集实际工作区域、工作设备的相关影像数据;
[0059]
蔬菜信息采集模块2,与中央控制模块4连接,用于采集待栽培的蔬菜的类型、适宜的光照、温度、湿度及其他相关数据;用于利用摄像设备采集栽培过程中的蔬菜的影像数据;同时用于向蔬菜发送红外线并获取蔬菜红外吸收度;
[0060]
温湿度数据采集模块3,与中央控制模块4连接,用于采集栽培区各个栽培架的温度、湿度数据;
[0061]
中央控制模块4,与环境信息采集模块1、蔬菜信息采集模块2、温湿度数据采集模块3、判断模块5、三维模型构建模块6、坐标确定模块7、栽培区控制模块8、蔬菜上下架管理模块9、路径规划模块10以及输送控制模块11连接,用于利用单片机或控制器控制各个模块正常工作;
[0062]
判断模块5,与中央控制模块4连接,用于基于采集的蔬菜的影像数据、红外吸收度以及蔬菜相关信息判断待上架蔬菜于栽培区需放置位置或待收割蔬菜需放置的收割线位置以及蔬菜是否成熟;
[0063]
三维模型构建模块6,与中央控制模块4连接,用于基于采集的环境信息以及影像数据进行工作区域的三维模型构建;
[0064]
坐标确定模块7,与中央控制模块4连接,用于确定工作区域中栽培区、收割区的位置坐标以及相应区域的栽培架或收割线的坐标;
[0065]
栽培区控制模块8,与中央控制模块4连接,用于基于采集的蔬菜栽培适宜温湿度数据以及采集的当前栽培架的温湿度数据进行温湿度的调节;
[0066]
蔬菜上下架管理模块9,与中央控制模块4连接,用于利用机械手基于确定的待上架蔬菜于栽培区需放置位置进行蔬菜的上架;同时用于当判断蔬菜成熟后进行蔬菜的下架;
[0067]
路径规划模块10,与中央控制模块4连接,用于基于构建的工作区域的三维模型以及判断的位置数据、坐标数据规划移动式机器人输送蔬菜的路径;
[0068]
输送控制模块11,与中央控制模块4连接,用于利用移动式机器人基于规划的路径进行蔬菜的输送控制。
[0069]
本发明实施例提供的工作区域包括:栽培区、收割区以及其他区。
[0070]
如图2所示,本发明实施例提供的三维模型构建模块基于采集的环境信息以及影像数据进行工作区域的三维模型构建包括:
[0071]
s101,基于采集的工作区域的图纸数据,获取用于组建工作区域的各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素;
[0072]
s102,根据所述所述屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素,生成屋顶、墙面体、地基、内柱、天花板的三维模型;
[0073]
s103,基于获取的工作区域的图纸利用屋顶、墙面体、地基、内柱、天花板的三维模型构建工作区域的三维模型,且所述三维模型包括墙体部分、以及设置于墙体内部的栽培区、收割区以及其他区;
[0074]
s104,利用采集的工作区域的影像区域进行构建的三维模型的验证;当验证通过时,不执行其他处理;当验证不通过时,基于获取的环境信息以及图纸结合实际影像数据进行适应性调整,直至验证通过。
[0075]
如图3所示,本发明实施例提供的基于采集的工作区域的图纸数据,获取用于组建工作区域的各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素包括:
[0076]
s201,根据不同类型模块组件所属的预设拆分规则,分别对工作区域图纸进行拆分,获得各种类型的屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件的设计元素;
[0077]
s202,将所述屋顶模块组件、墙面体模块组件、地基模块组件、内柱模块组件以及天花板模块组件进行参数化,确定各个组件对应的参数表。
[0078]
如图4所示,本发明实施例提供的判断模块基于基于采集的蔬菜的影像数据、红外吸收度以及蔬菜相关信息判断蔬菜是否成熟包括:
[0079]
s301,获取采集的蔬菜的影像数据,根据所述蔬菜的图像信息识别蔬菜种类;
[0080]
s302,基于红外光谱数据库,确定相应蔬菜种类对应的红外线波段;基于蔬菜数据库,确定相应蔬菜种类的标准成熟高度、成熟图像特征信息;
[0081]
s303,获取所述蔬菜对红外线的吸收度以及对应的高度、图像特征信息判断是否与数据库中存储的红外线波段、标准成熟高度、成熟图像特征信息是否一致;若一致,则判断蔬菜成熟。
[0082]
如图5所示,本发明实施例提供的根据蔬菜的图像信息识别蔬菜种类包括:
[0083]
s401,构建基于卷积神经网络的蔬菜分类识别模型;
[0084]
s402,将蔬菜的图像信息输入构建的蔬菜分类识别模型进行分类识别。
[0085]
本发明实施例提供的基于采集的蔬菜栽培适宜温湿度数据以及采集的当前栽培架的温湿度数据进行温湿度的调节包括:
[0086]
采用如下公式进行温度的控制:
[0087]
s=0;
[0088]
s=1;
[0089]
式中:表示t时刻的栽培架温度,℃;表示t+1时刻的蔬菜栽培适宜温度,℃;c为等效热容,j/℃;r为等效热阻,℃/w;s为空调启停状态变量,1表示空调启动,0表示空调停止;δt为仿真时间间隔;
[0090]
温湿度的调节模型如下:
[0091][0092]
式中aj,bj为系数矩阵,j=1,2,
…
,2m,x=[x1,x2]t为状态变量,x1为栽培架的温度,x2栽培架的湿度,u为扰动输入量,标号j表示第j个栽培架。
[0093]
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1